攝像頭智能小車中自適應二值化的研究
2015-10-29 15:40:27王偉業徐鋒
科學家 2015年9期
王偉業 徐鋒
摘 要 以“飛思卡爾”杯智能汽車競賽為背景,對現有的二值化算法的分析,基于迭代的思想提出了一種新的雙峰法的改進二值化算法。并通過實驗的方法將新方法和傳統算法進行比較,實驗結果表明新方法實現了自適應二值化閾值的計算,解決了傳統全局雙峰法分割賽道圖像時適應性差,易受光線影響的問題,適用于攝像頭循跡小車中的實時圖像處理。
關鍵詞 飛思卡爾;智能車;圖像分割;自適應二值化
中圖分類號 TP2 文獻標識碼 A 文章編號 2095-6363(2015)09-0028-02
圖像分割是數字圖像處理中的一項基本技術,該技術在目標識別、機器視覺以及視頻和圖像信息的檢索中起著重要的作用。圖像二值化是圖像分割中的一項重要的技術,在眾多的應用場合中都要求對灰度圖像進行二值化,所謂二值化就是設定一個閾值將圖像各個元素按其灰度值分為背景和目標兩類,由于分割后圖像只有兩個等級,因而稱之為二值化圖像。因此在進行圖像的分割時閾值選取的恰當與否直接決定著目標信息的保留狀況。有關閾值選取的方法吸引了大批專家學者為之付出了辛勤的勞動,也提出了許多方法,例如基于灰度直方圖的雙峰法,最大類間方差法(Otsu法),最大熵方法等等,并且不斷有新的方法提出。
受教育部高等教育司委托高等學校自動化專業教學指導分委員會主辦的“飛思卡爾”杯全國大學生智能汽車競賽是在飛思卡爾半導體公司的贊助下以飛思卡爾單片機為主控芯片,自主設計并制作出具有駕駛能力的智能汽車,并在最短時間內完成賽道運行的一項賽事,是教育部主辦的全國大學生五大競賽之一。此項競賽涵蓋了包括傳感器技術、電子技術、計算機技術、機械等多個領域的極具創意性的比賽。按照使用傳感器種類的不同分為攝像頭組、光電組和電磁組。攝像頭傳感器因其獲取的信息豐富,能更好的反應賽道的真實情況而被廣泛地采用,在每年比賽中攝像頭組的競爭也非常激烈,因此一套適應性強、 可靠性高、運算量小的二值化算法是取得優秀成績的先決條件。
1 二值化原理
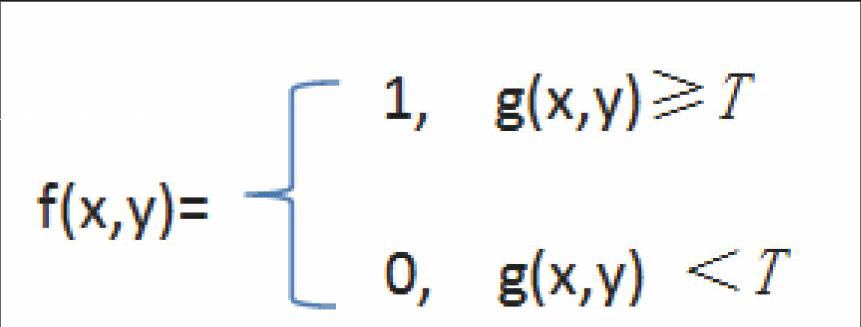
將圖像劃分成一些特定的區域稱為圖像分割。按照分割方法的不同分為邊緣檢測法和閾值分割法。邊緣指一幅圖像中灰度變化比較劇烈的地方,因此邊緣檢測法主要依靠圖像的一階或二階導數但是導數對噪聲非常敏感,因此在采用此類方法時需要對圖像進行濾波。但普通的濾波算法在濾除噪聲的同時可能會降低邊緣強度。閾值法是將每個像素點的灰度值與閾值進行比較,根據比較結果將圖像劃分為目標和背景。二值化過程可表示為:
g(x,y)為(x,y)處的像素值,f(x,y)為二值化后(x,y)處的像素值,T為閾值。常用的閾值選取方法有很多,根據閾值個數的多少可分為全局閾值法和局部閾值法。全局閾值法是指進行圖像二值化時所有圖像元素只與一個全局閾值進行比較。
常用的全局閾值法包括以下幾種。
1)固定閾值法。這種二值化方法采用人為設定的閾值,該方法的運算量小,但是其缺點也是很明顯的。適應性差,且分割結果極易受人為因素的干擾。
2)雙峰法。首先統計圖像的一維灰度直方圖,如果此幅圖像中背景簡約,目標與背景的對比比較明顯,灰度直方圖就會呈現明顯的雙峰分布,那么兩峰之間的谷底的灰度值就是就是最佳的二值化閾值。
3)最大類間方差法。灰度值方差是灰度分布均勻性的度量。方差越大表明構成圖像的各部分差別越大,反之說明構成圖像各部分差別越小。通過計算目標的平均灰度值、背景平均灰度值整幅圖像的平均灰度值等來找出最大類間方差以及最小類內方差的點。此點即為錯分幾率最小的點。
全局二值化在處理一些復雜的圖像時出錯率較高,因而在此基礎上提出了局部閾值法。局部閾值將原圖像分成多塊較小的圖像,并對每一塊圖像分別計算閾值。典型的局部閾值法包括以下幾種。
1)Bersen算法。閾值的選取只與特定尺寸的小圖像中的最大最小值有關,在分割非均勻光照或背景復雜的圖像時容易產生偽影或殘缺的現象。
2)Niblack算法。該算法閾值與局部圖像的均值和方差決定,該方法運算量大、容易受到背景噪聲的干擾,且存在偽影或殘缺的現象。
在對圖像處理實時性和適應性要求比較高的應用場合中,上述均存在不能同時兩者兼顧的問題。但是針對智能車系統普通的雙峰法就能滿足要求,因為智能車運行在特定的比賽賽道上,背景簡約且對比明顯且與賽道的對比明顯。但是在應用過程中發現有時會出現賽道光線分布不均勻的區域或是受光線斜射的影響,背景和目標的對比不是非常明顯,因而會出現圖像二值化出錯的情況,從而導致智能車控制決策失誤因而出現車模運行失控的情況。基于上述情況需要對雙峰法進行改進,使之滿足智能車的運行需求。
2 雙峰法改進方案
2.1 基本思想
在對雙峰法進行改進之前首先對比賽場地以及比賽過程進行分析。比賽時的賽道是由鋪設在藍色地毯上的KT板或PVC板拼接而成。賽道寬度45cm,并在賽道左右邊緣各貼有寬度為2.5cm的黑條。賽道上有各種彎道以及路障和坡道組成。參賽選手在正式進入比賽場地之前有20min的時間在試跑跑道上試車。進入比賽場地后選手也有60s的時間在比賽場地進行準備和測試。60s結束后,參賽車模要在30s之內沖過起跑線。
在對采集到的灰度圖像進行雙峰法分割時,效果比較明顯但雙峰之間可能存在比較寬的區域,因此閾值T選取過程中也需要進行人為的干預,分割效果會受到人為因素的干擾。由于雙峰法需要對整幅圖像的灰度進行統計,但是一幅圖像的數據量往往比較龐大。單片機在進行這樣的處理時可能耗費較多時間使得整個系統的控制周期變長,嚴重制約了車速的提升空間。因此需要簡便算法,降低誤差,獲得比較準確的閾值T。
2.2 算法實現
由賽道分析可知,比賽賽道的寬度是固定的,且賽道邊緣是連續的。智能車競賽一般在體育館中進行,光線強度在時間和空間上都是逐漸變化的,并且在比賽之前有足夠多的時間適應光線。基于以上分析提出如下改進方案。
1)當攝像頭采集完一幅圖像后,對圖像的前九行根據雙峰法進行二值化,直到得出較好的分割效果。“較好”指經過二值化后賽道的寬度正常且賽道邊緣連續。
2)每一行都分別設置一個閾值T。從第十行開始沿用上一行的閾值進行分割,若分割后的賽道寬度正常且此次分割得到的左邊界不在上一行右邊界的右邊,右邊界不在上一行左邊界的左邊。此時根據該閾值將該行圖像劃分為目標和背景兩部分,分別計算目標和背景兩部分的灰度平均值。并將兩部分的灰度平均值除以二,做為當前行的最佳分割閾值。
3)若當前分割出來的出來的賽道寬度不在正常范圍內或與上一行賽道邊界相比有較大的跳變,則保持當前行的分割閾值不變,下一行繼續沿用此閾值進行分割。
4)若一幅圖像處理完畢,處理接下來的圖像按照步驟一繼續進行處理。
3 實驗測試
在對上述方案進行測試時采用自主設計并制作的智能車模型上進行測試。攝像頭采用ov7620彩色攝像頭。該攝像頭具有自動增益和自動白平衡控制,能進行亮度、對比度、飽和度、γ校正等多種調節功能;它支持連續和隔行兩種掃描方式,VGA與QVGA兩種圖像格式;幀速率為30fps;數據格式包括YUV、YCrCb、RGB三種,能夠滿足一般圖像采集系統的要求。
主控芯片采用FreeScale半導體公司生產的MK60DN512VLL10作為主控芯片,通過程序配置其內核頻率為200Mhz,總線頻率為100Mhz。通過sccb(串行攝像機控制總線協議)對攝像頭的寄存器進行相關配置。由于智能車運行過程中只需要采集灰度圖像就可滿足控制要求。因此將攝像頭配置為YUV格式輸出,并通過單片機的DMA模塊采集Y數據。
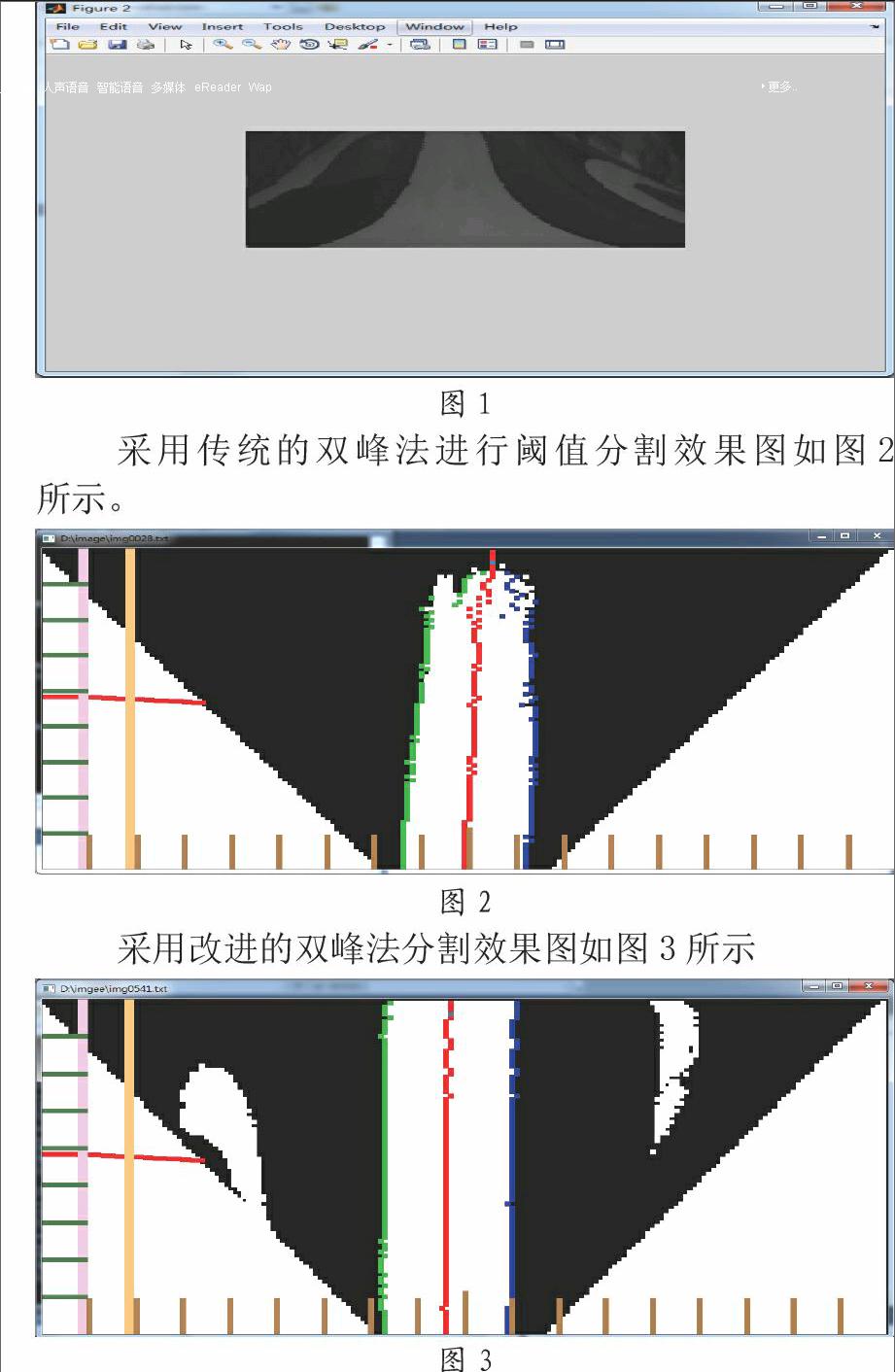
為了驗證算法的可行性通過攝像頭采集一幅賽道原始的灰度圖像,該圖像中光線分布不均勻,圖像前端光線較暗。如圖1所示。
采用新算法的閾值從近及遠呈遞增分布。
通過對比分析該方法與傳統雙峰法的分割效果可以看出,采用新算法的二值化結果相對于采用傳統算法的結果較優。在光線分布不均勻時,二值化效果更加明顯。此算法具有較好的光線適應能力,更加完整地保留了賽道信息,為后續賽道信息的提取以及控制策略的執行提供了良好的保障。由于此算法每一行都需要進行一次閾值計算相對于傳統全局二值化算法,可能需要消耗較長的時間,但是經過實際測試表明通過配置攝像頭隔行掃描并采集其中90行,180列的數據的情況下,執行完該二值化算法后任然有充足的時間執行后續的控制算法。
4 結論
本文對現有的二值化算法進行了分析和比較,并討論了這些算法在智能車系統中的可行性。最終選用雙峰法做為二值化算法,通過分析該方法的不足結合智能車競賽的特點提出了一種新的改進算法,新算法是基于迭代的思想,通過閾值傳遞進行圖像二值化。實驗表明,該方法相對于傳統的二值化算法具有更強的光線適應能力以及較小的運算量的特點,并且能較好的還原賽道的真實狀況。但是任何算法都只能適用于特定的范圍,該算法只能在一定范圍內跟隨光線的變化對閾值進行
調整。
參考文獻
[1]阮秋琦.數字圖像處理學[M].北京:電子工業出版社,2001:390-393.
[2]王強,馬利莊.圖像二值化時圖像信息的保留[J].計算機輔助設計與圖形學學報,2000,12(10):746-750.
[3]楊暉,曲秀杰.圖像分割方法綜述[J].電腦開發與應用,2005(3).
[4]王積分,張新榮.計算機圖像識別[M].北京:中國鐵道出版社,1998:75-77.
[5]Otsu .A Threshold Selection Method from Gray –Level Histogram[J]. IEEE Trans on SMC -9,1979:62-66.
[6]劉文萍,吳立德.圖像分割中閾值選取方法比較研究[J].模式識別與人工智能,1997,10(3):274-277.