基于積分反步控制的永磁直線同步電動機滑模速度控制*
2015-11-02 11:10:46戴躍洪唐傳勝
組合機床與自動化加工技術 2015年3期
孫 華,戴躍洪,唐傳勝
(1.西華大學機械工程學院,成都 610039;2.電子科技大學機電學院,成都 611731)
基于積分反步控制的永磁直線同步電動機滑模速度控制*
孫 華1,2,戴躍洪2,唐傳勝2
(1.西華大學機械工程學院,成都 610039;2.電子科技大學機電學院,成都 611731)
文章考慮一種不確定載荷的永磁式同步直線電機驅動系統提出了一種改進魯棒非線性控制器。該控制器是基于新的積分反步法設計的,這是一種對復雜非線性系統有用的魯棒控制方法,通過引入積分以減少穩態誤差。根據Lyapunov穩定理論對所提出的反饋控制律的穩定性進行驗證。與傳統的基于PID控制比較并給出了Matlab仿真的滑模速度觀測器比較,這證明了該PMSLM驅動系統控制方法的可行性和有效性。
永磁式同步直線電動機;積分反步控制;PID控制
0 引言
永磁同步直線電機(PMSLM),它具有高效率、高功率密度、高精確度和可重復性等許多理想的性能特點;它易于維護,低振動和噪聲,被廣泛用于工業應用,例如機器人系統、機床、磁懸浮車輛等[1-3]。然而,在實際PMSLM伺服系統中,有大量的干擾和不確定性例如:未建模動態、參數不確定性、摩擦和負載擾動。由于這些原因,近日大家一直致力于解決控制PMSLM的問題[4,5]。最簡單的方案是基于一個或多個級聯PID控制,這在工業實踐中極為常見[6]。眾所周知,這些方案由于其結構簡單、易于實現而被廣泛使用,但他們在某些特定的領域內無法實現精確控制。最近,許多非線性控制方法被開發出來以提高系統的控制性能,如自適應控制、滑模控制、魯棒控制、自學習控制、預測控制、智能控制[7-13]。然而,也有一些缺陷阻礙這些方法在實際中應用,例如,它的自適應控制技術需要一個參數的自適應機制,這增加了系統的成本和復雜性,并降低其反應能力。模糊控制需要模糊關系以滿足特定匹配條件,它表現出固有的抖動;智能控制器的程序結構過于復雜。反步積分自適應控制是一個系統的遞推設計方法的非線性系統[14]。在該方法中,如果選擇適當的控制輸入,控制系統可以快速穩定。該方法已成功地用來實現直線感應電機的位置控制[15,16]。在本文中,我們用這種方法來實現高性能的速度跟蹤。
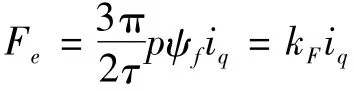
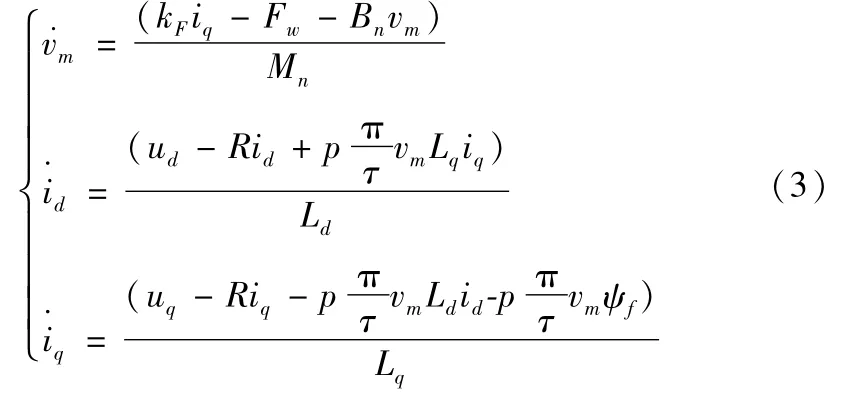
1 PMSLM的動態數學模型
在d-q旋轉坐標系上,表面安裝的永磁直線同步電機可以表示如下[17]:

2 PMSLM控制器設計
本文的目的是為了獲得控制電壓來實現高性能的速度跟蹤。因此,本文的重點是通過積分反步控制方法獲得控制電壓,詳細設計過程包括如下。
步驟1:定義的速度跟蹤誤差

其中v*是所需的引用動機的轉速,速度和誤差的動態如下

對Lyapunov函數V1求導,代入(5)式,得:

如果定義了以下的穩定的虛擬控制功能實現速度跟蹤控制:

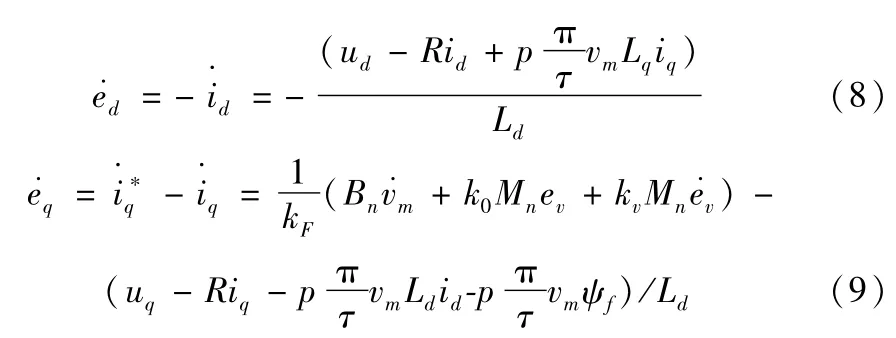
步驟2:電流跟蹤誤差定義如下:

由(3)、(7)得:

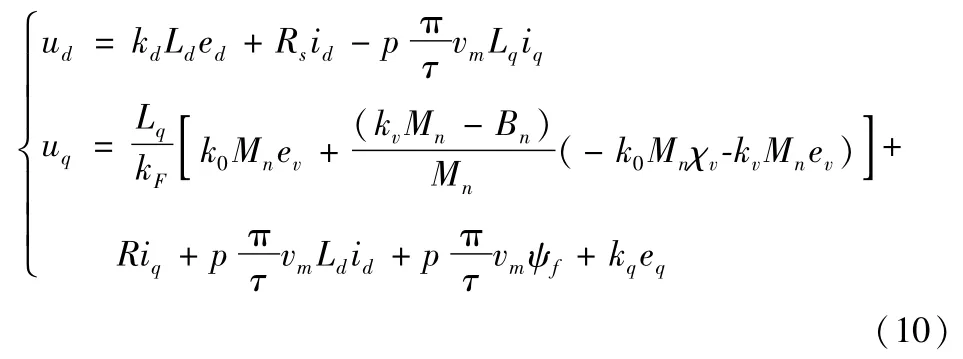
(kd>0,kq>0)故:0,因此,根據Lyapunov穩定性理論,所設計的控制器是漸近穩定的。
3 試驗仿真結果

圖1 基于PID控制方案的PMSLM驅動系統方框圖
對該方案的有效性的研究,傳統基于PID控制的滑模估計器和基于以積分反步控制為基礎的直線電機驅動是利用MATLAB/Simulink軟件包進行分析。一個典型的基于PID控制的矢量控制的永磁直線同步電機如圖1所示,所提出的控制方案如圖2所示。系統參數如表1所示。選擇固定步長為1e-5的ode45算法。PID控制參數選擇如下:在速度回路中kvp=0.04,kvi=2.05,kvd=0;在電流回路中kdp=300,kdi=800,kqp=300,kqi=800,IBPC控制參數選擇如下:k0=300,kv=800,kd=300,kp= 800。對于PID控制和IBPC控制的PMSLM驅動系統仿真結果示于圖3a~圖3d,表示了起動性能以及載荷突然沖擊的影響。驅動系統在一個恒定的載荷(200N)和1 m/s的參考速度下啟動。從圖3可以看出,IBPC控制比傳統的PID控制具有更好的起動性能和魯棒性。在t= 0.1s時間內有突然沖擊載荷作用,IBPC控制的系統可以在低于0.01s的時間內恢復到參考速度。比PID控制的系統少0.1s。可以從圖看到圖3b~圖3d,該方法比PID控制具有較小的力和電流波動。
圖4a~圖4d顯示了PID控制和IBPC控制方案在速度增加時電機驅動系統的性能。我們可以從圖4中q軸電流看出該IBPC控制方案比PID方法控制具有更好的瞬態響應性能。圖4b~圖4d也表明,該方法比PID控制具有更小的力和電流波動。
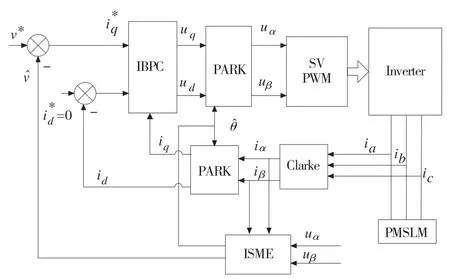
圖2 基于IBPC的PMSLM驅動系統的方框圖
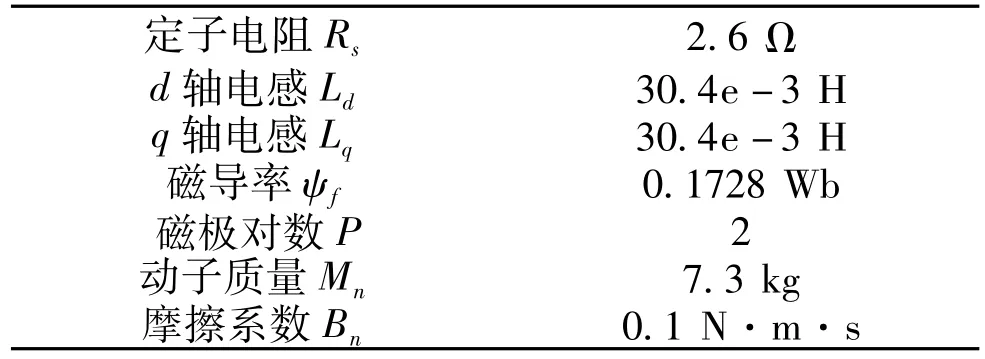
表1 本文中使用的SPMSM參數

圖3 采用PID控制與所提出的方案控制PMSLM驅動系統在外載荷沖擊的響應
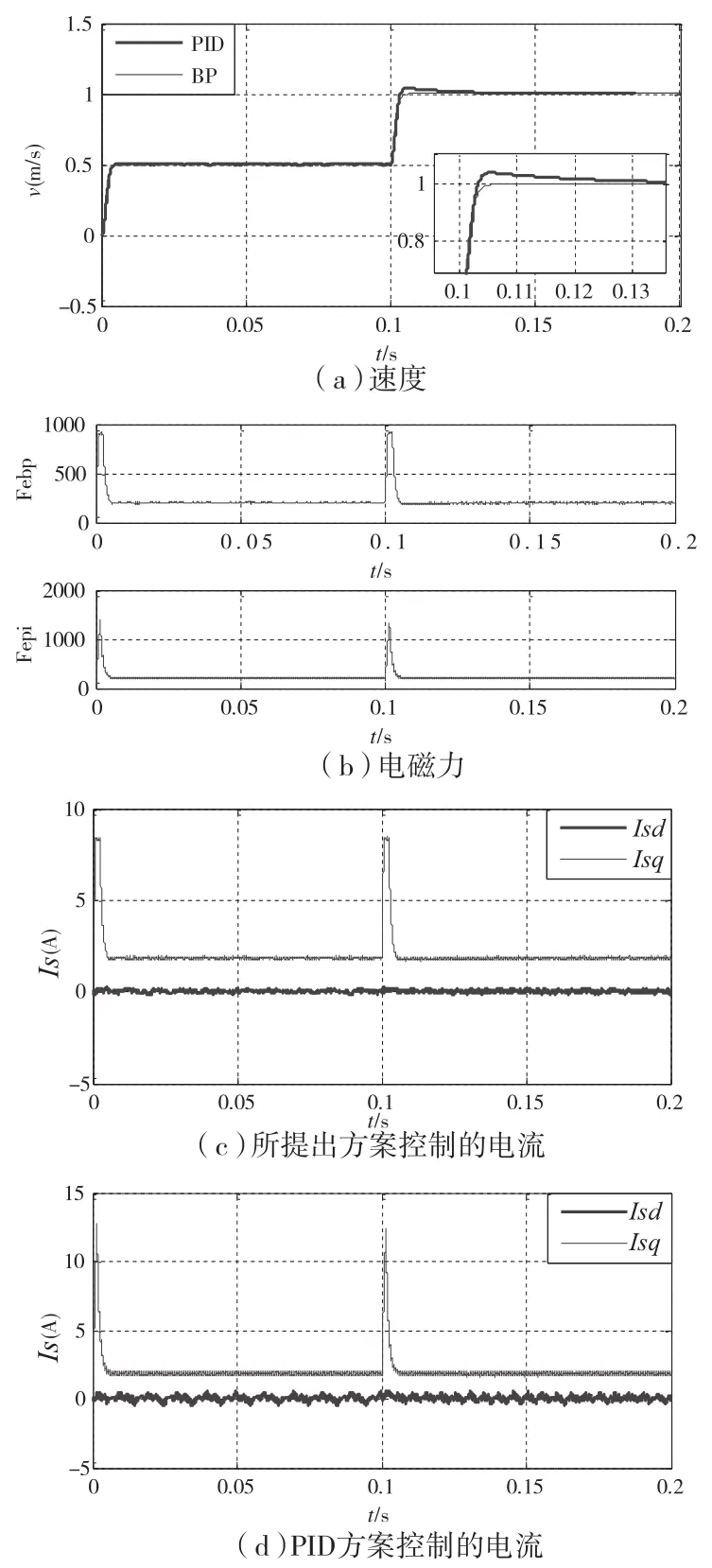
圖4 采用PID控制與所提出的方案控制PMSLM驅動系統在速度突變時的響應
5 結論
首先,該控制器比傳統的PID控制結構簡單。從圖1可見,在傳統的基于PID的矢量控制系統中有三個PI控制器,包括一個PI速度控制器和兩個PI電流控制器。然而,從圖2可見,所提出的方法只有一個控制器;其次,該控制方案比傳統的PID控制具有較少的控制參數。在所提出的控制器中,它有約3~4個控制參數,而在傳統的PID控制中;它需要6~9個控制參數。然后,該控制器比PID控制具有更好的跟蹤性能和魯棒性。
[1]Zhao D,Deng X,Yi J.Motion and internal force control for omnidirectional wheeled mobile robots[J].IEEE/ASME Trans Mechatronics,2009,14(3):382-387.
[2]Li X,Du R,Denkena B.Tool breakage monitoring using motor current signals for machine tools with linear motors[J].IEEE Trans Ind Electron,2005,52(5):1403-1408.
[3]Hoburg JF.Modeling maglev passenger compartment static magnetic fields from linear Halbach permanent-magnet arrays[J].IEEE Trans Magn,2004,40(1):59-64.
[4]Yao WH,Tung PC,Fuh CC,et al.A Robust Uncertainty Controller With System Delay Compensation for an ILPMSMSystem With Unknown System Parameters[J].IEEE Trans Ind Electron,2011,58(10):4727-4735.
[5]Lin FJ,Chou PH,Chen CS,Lin YS.DSP-Based Cross-Coupled Synchronous Control for Dual Linear Motors via Intelligent Complementary Sliding Mode Control[J].IEEE Trans Ind Electron,2012,59(2):1061-1073.
[6]Tang KZ,uang SN,Tan KK,etal.Combined PID and nonlinear control for servo mechanical systems[J].Mechatronics,2004,14(6):701-714.
[7]蘇亮亮,魏玲玲.異步電機定子磁場定向無速度傳感器矢量控制研究[J].組合機床與自動化加工技術,2014(5):150-154.
[8]王洋,劉永光.基于Simulink的永磁同步電機矢量控制系統仿真[J].組合機床與自動化加工技術,2011(2):78-82.
[9]高延榮,舒志兵,耿宏濤.基于Matlab/Simulink的永磁同步電機(PMSM)矢量控制仿真[J].機床與液壓,2008,36(7):296-299.
[10]張海嘯,王淑紅.基于SVPWM永磁同步電機控制系統的建模與仿真[J].電氣技術,2007(9):36-39.
[11]劉桂秋,潘德棟,李龍.基于模糊參數逼近器的永磁同步電機反推控制[J].組合機床與自動化加工技術,2014(5):117-120.
[12]徐艷平,鐘彥儒.基于空間矢量PWM的新型直接轉矩控制系統仿真[J].系統仿真學報,2007,19(2):344-347,375.
[13]夏加寬,沈麗,彭兵,等.永磁直線伺服電機端部法向力波動分相補償控制[J].組合機床與自動化加工技術,2014(2):73-77.
[14]Shieh HJ,Shyu KK.Nonlinear sliding-mode torque control with adaptive backstepping approach for induction motor drive[J].IEEE Trans Ind Electron,1999,46(2):380-389.
[15]Lin FJ,Chang CK,Huang PK.FPGA-based adaptive backstepping sliding-mode control for linear induction motor drive[J].IEEE Trans Power Eletron,2007,22(4):1222-1231.
[16]Lin FJ,Shieh PH,Chou PH.Robust adaptive backstepping motion control of linear ultrasonic motors using fuzzy neural network[J].IEEE Trans Fuzzy Syst,2008,16(3):676-692.
[17]Fujimoto Y,Kominami T,Hamada H.Development and analysis of a high thrust force direct-drive linear actuator[J]. IEEE Trans Ind Electron,2009,56(5):1383-1392.
(編輯 李秀敏)
Control of Permanent Magnet Linear Synchronous Motor Based on Sliding Velocity Integral Backstepping Control
Sun Hua1,2,DAI Yue-hong2,TANG Chuan-sheng2
(1.School of Mechanical Engineering,Xi Hua University,Chengdu 610039,China;2.School of Mechatronics Engineering,University of Electronic Science and Technology of China,Chengdu 611731,China)
The permanent magnet synchronous linear motor drive system considered in this paper presents an uncertain load a new robust nonlinear controller.The controller is based on a new backstepping design,which is a complex nonlinear system is useful for robust control methods.By introducing integral to reduce the steady state error.Lyapunov stability theory based on the stability of the feedback control law proposed for validation.The comparison is based on the traditional PID control Compare and given Matlab simulation sliding mode observer and speed,which proved the feasibility and effectiveness of the PMSLM drive system control method.
permanent magnet synchronous linear motor;integral backstepping control;PID control
TH39;TG506
A
1001-2265(2015)03-0101-04 DOI:10.13462/j.cnki.mmtamt.2015.03.027
2014-07-09;
2014-08-22
西華大學制造與自動化實驗室開放研究基金(szjj2014-030);國家科技重大專項(2009ZX04001)
孫華(1979—),男,云南曲靖人,西華大學實驗師,博士,主要研究方向為智能控制,(E-mail)106191627@qq.com。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
