平流層飛艇飛行模態分析*
2015-11-05 03:42:18楊躍能邵漢斌
國防科技大學學報 2015年4期
楊躍能,鄭 偉,閆 野,邵漢斌
平流層飛艇飛行模態分析*
楊躍能,鄭 偉,閆 野,邵漢斌
(國防科技大學 航天科學與工程學院, 湖南 長沙 410073)
平流層飛艇的總體布局、升空原理和工作模式明顯不同于導彈、飛機等傳統飛行器,其動力學特性亦不同于上述飛行器,須深入研究其飛行動力學的基本特性、一般規律和內在機理。針對此問題,系統研究了平流層飛艇的飛行模態。采用小擾動方法推導了平流層飛艇的線性運動方程,將其解耦分組為縱向運動方程和橫側向運動方程;定義模態及模態參數,研究平流層飛艇的模態分析方法;通過計算分析狀態方程的特征值和特征向量,研究了平流層飛艇的飛行模態。結果表明:縱向運動由浮沉、浪涌和擺動三種模態疊加而成,橫側向運動由偏航衰減、側滑衰減和滾轉振蕩三種模態疊加而成。
飛行力學;平流層飛艇;運動方程;運動模態;特征向量
(CollegeofAerospaceScienceandEngineering,NationalUniversityofDefenseTechnology,Changsha410073,China)
臨近空間是指距地面20~100km高度之間的空間范圍,介于常規航空器的最高飛行高度和航天器的最低軌道高度之間,是跨接航空與航天的樞紐[1]。隨著航天科技的迅猛發展,人類對臨近空間的認識逐步深化,其特有的應用價值和戰略意義日益凸顯,成為各航天大國關注的焦點[2]。臨近空間飛行器是指能夠在臨近空間區域飛行并執行特定任務的飛行器,按飛行速度可分為兩大類[3]:一類是低動態飛行器,包括高空氣球、平流層飛艇、高空長航時無人機等;另一類是高動態飛行器,包括高超聲速滑翔飛行器、高超聲速巡航飛行器等。其中,平流層飛艇以其顯著的應用優勢成為臨近空間飛行器技術的主要研究方向之一[4]。
平流層飛艇是指依靠浮升氣體提供靜升力,依靠推進系統和控制系統實現操縱飛行,長期工作在平流層平均風速較小的高度范圍,并執行特定任務的浮空類飛行器。平流層飛艇的總體布局、升空原理和工作模式不同于導彈、飛機等飛行器,具有以下特點:氣動外形為流線型軸對稱旋轉體;主要依靠浮升氣體提供靜升力;體積/質量比大、飛行速度低,慣性特性顯著;工作模式多為低速巡航和區域駐留。上述特點使得平流層飛艇的動力學特性不同于導彈、飛機等飛行器,因此,須深入研究其飛行動力學的基本特性、一般規律和內在機理。Mueller等推導了高空飛艇(HighAltitudeAirship,HAA)的動力學模型,基于小擾動線性化方程,仿真研究了其開環響應特性[5]。歐陽晉等研究了“致遠一號”飛艇的動力學建模問題,推導了六自由度運動方程,并對其縱向運動進行了理論分析和仿真研究[6]。LiYuwen等建立了Skyship-500飛艇動力學模型,并通過仿真試驗分析了飛艇的運動模態[7]。文獻[8]采用Newton-Euler方法推導了矢量形式的六自由度動力學模型,采用近似線性化方法和Lyapunov穩定性理論研究了飛艇的運動穩定性。王曉亮以某型試驗飛艇的非線性動力學模型為研究對象,采用近似線性化方法分析了飛艇的運動穩定性和能控性[9]。
上述文獻為平流層飛艇動力學特性研究提供了借鑒,但是對平流層飛艇飛行模態的物理成因和內在機理尚缺乏系統深入的研究。針對這一問題,楊躍能等采用小擾動方法推導了平流層飛艇的線性化運動方程,研究了平流層飛艇的模態分析方法;通過計算分析狀態方程的特征值和特征向量,系統研究了平流層飛艇的飛行模態,揭示了其一般規律和內在機理。
1 平流層飛艇動力學模型
1.1 坐標系及運動參數定義
如圖1所示,定義地面坐標系oexeyeze和體坐標系obxbybzb[7]。運動參數定義如下:位置矢量R=[x,y,z]T,x,y,z分別為軸向、側向和豎直方向的位移;姿態角矢量Ω=[θ,ψ,φ]T,θ,ψ,φ分別為俯仰角、偏航角和滾轉角;速度矢量v=[u,v,w]T,u,v,w分別為軸向、側向和垂直方向的速度;角速度矢量ω=[p,q,r]T,p,q,r分別為滾轉、俯仰和偏航角速度。CV,CG分別為平流層飛艇的浮心和重心,CV到CG的矢量為rG=[xG,yG,zG]T。
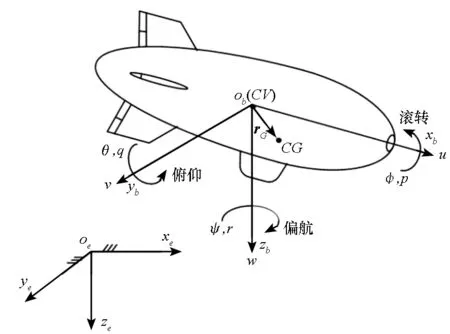
圖1 坐標系及運動參數示意圖Fig.1 Coordinate frames and motion variables
1.2 線性化運動方程
采用小擾動方法對平流層飛艇六自由度運動方程[10]進行線性化,可得縱向線性運動方程和橫側向線性運動方程。
.2.1 縱向線性運動方程
平流層飛艇的縱向線性運動方程可表示為[11]:
(1)
式中:xL=[u,w,q,θ]T為狀態向量;uL=[T,υ,δe]T為控制向量,δe為等效水平舵,T為螺旋槳推力大小,υ為推力矢量與xbobzb面之間的夾角。
(2)
(3)
(4)
其中,Xi,Zi,Mi(i=u,w,q,θ,T,υ,δe)分別為軸向力、垂直方向力以及俯仰力矩對縱向運動參數和控制量的偏導數[10,12]。
(5)
式中,
(6)
(7)
.2.2 橫側向線性運動方程
平流層飛艇橫側向線性運動方程可表示為:
(8)
式中:xS=[v,p,r,φ]T為狀態向量;uS=[μ,δr]T為控制向量,δr為等效方向舵,μ為推力矢量與xbobzb面之間的夾角。
(9)
(10)
(11)
其中,Yi,Li,Ni(i=v,p,r,φ,μ,δr)分別為側向力、滾轉力矩以及偏航力矩對橫側向運動參數和控制向量的偏導數[11,13]:
(12)
式中,
(13)
(14)
2 模態分析方法
自由擾動運動是指在無控制輸入和無干擾條件下,僅由運動參數的初值所引起的擾動運動。在數學上,自由擾動運動為小擾動運動方程的齊次方程在非零初值條件下的解。在物理上,自由擾動運動為飛艇受到瞬時擾動后的運動響應。自由擾動運動反映了平流層飛艇運動的固有特性[14],因此,可以通過平流層飛艇的自由擾動運動來研究其模態特征。
2.1 特征值及特征向量
特征值及特征向量是自由擾動運動中最重要的特征量,據此可以導出自由擾動運動的一般性質。特征值決定自由擾動運動的模態及運動穩定性;特征矢量決定各運動模態中各運動參數不同的幅值比和相位差,從而決定了各運動模態中運動參數擾動的主次要素[15]。
對于自由擾動運動問題,平流層飛艇的狀態方程可表示為:
(15)
對于n維方陣A和n維列向量v=[v1v2…vn]T,若存在λ,使得
Av=λv
(16)
則稱λ為矩陣A的特征值,v為特征值λ所對應的特征向量。
由式(16)可得:
(λE-A)v=0
(17)
式中,E為n維單位矩陣。
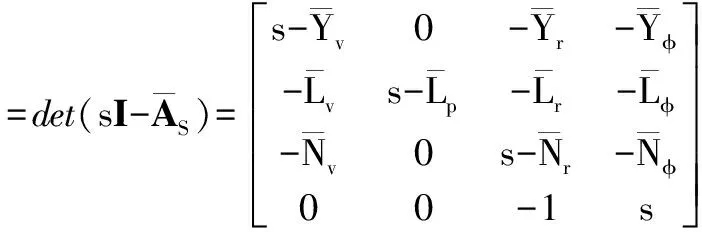
若式(17)存在非零解,則有以下特征方程成立:
(18)
當縱向和橫側向擾動運動描述為4階的狀態方程時,對應于特征值λi(i=1,2,3,4)的特征向量為:
vi=[f1(λi),f2(λi),f3(λi),f4(λi)]T
(19)
式中,f1(λi),…,f4(λi)為特征矩陣(λiE-A)的某一行的4個代數余子式。
特征矢量vi(i=1,2,3,4)可用比值表示為:
(20)
若特征值λi為實數,則特征矢量各元素也為實數,可直接用比值表示;若特征值λi為復數,則特征矢量各元素也為復數,此時其比值可用幅值比和相位差表示。
2.2 模態及模態參數
不同特征值對應的擾動運動的類型不同,每一個實數特征值或一對復數特征值都對應著一個基本運動形態,稱為模態[16]。每一個特征值所對應的模態運動的線性疊加,構成了平流層飛艇的擾動運動。
以二階系統為例討論模態[17],二階系統的標準特征方程可表示為:
(21)
式中,ξ,ωn分別為系統的阻尼比和無阻尼自振頻率。
式(21)對應的微分方程為:
(22)
式(21)的特征根為:

(23)
由式(23)可得,λ1,2或為一對共軛復根,或為兩個實根。
式(22)的解為:
x(t)=X1eλ1t+X2eλ2t
(24)
如式(24)所示,當λ1,2為兩個實根時,x(t)的運動為兩個指數型單調運動的疊加。若λ1,2為一對共軛復根,則(24)可表示為:
(25)
常用的模態參數定義如下[16]:
1)半衰期t1/2或倍幅時間t2。半衰期t1/2描述了模態運動參數變化至初始值的一半(模態收斂)所需時間;倍幅時間t2則描述了模態運動參數變化至初始值的兩倍(模態發散)所需時間。由式(25)可得,若模態收斂,則有
求解可得
當模態發散時,則有
2)振蕩頻率ω或周期T。對于振蕩型模態,頻率ω(rad/s)表示單位時間內的振蕩次數,周期T(s)表示振蕩一周所需的時間。由式(23)可得
3)半衰期內振蕩次數N1/2。半衰期內振蕩次數N1/2表明振蕩模態頻率與阻尼之間的關系,N1/2值越大,則表示振蕩頻率過高或振蕩阻尼過小。由定義可得
上述關于模態及模態參數的定義,適用于各類由線性常微分方程描述的高階系統。對于4階的縱向(或橫側向)擾動運動方程,當特征根為一對共軛復根η±iω和兩個不同實根λ3,λ4時,擾動運動規律為
式中,x1,…,x4為擾動狀態量。
每一個特征根對應的模態在各個狀態量中的表現關系(振蕩模態振幅比例A1∶A2∶… ∶A4,相位差φ1,φ2,…,φ4和單調模態幅值比)取決于該特征根所對應的特征矢量。
3 平流層飛艇飛行模態
3.1 縱向運動模態
(26)

(27)

λ1=-0.022,λ2=-0.877,λ3,4=-0.072 ± 0.097i。
根據縱向運動方程的特征值,可將飛艇縱向運動分為以下三個模態:
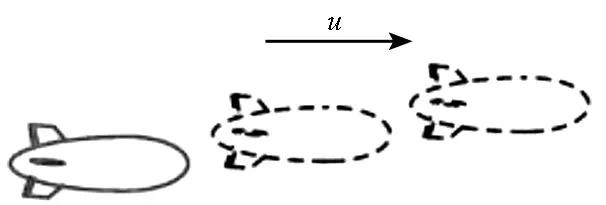
(a) 浪涌模態(a) Surge mode
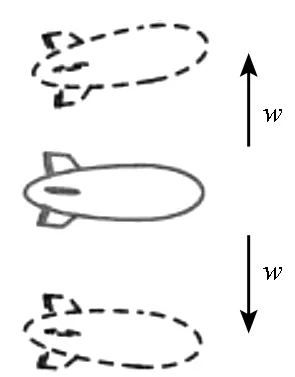
(b) 浮沉模態(b) Heave mode
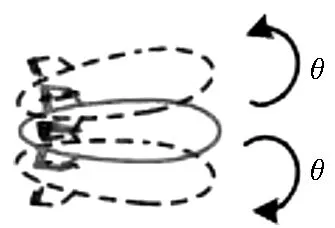
(c) 擺動模態(c) Pendulum mode圖2 縱向運動模態示意圖Fig.2 Modes of longitudinal motion
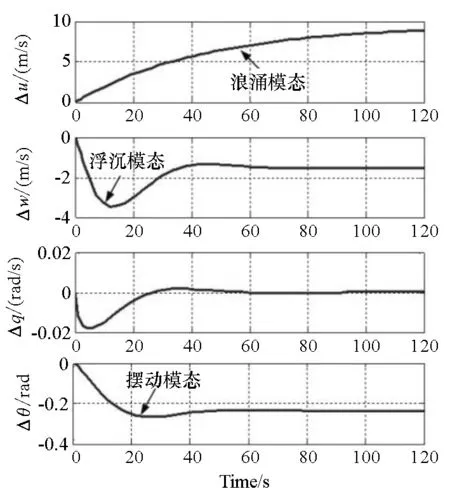
圖3 縱向運動參數變化曲線Fig.3 Variables of longitudinal motion
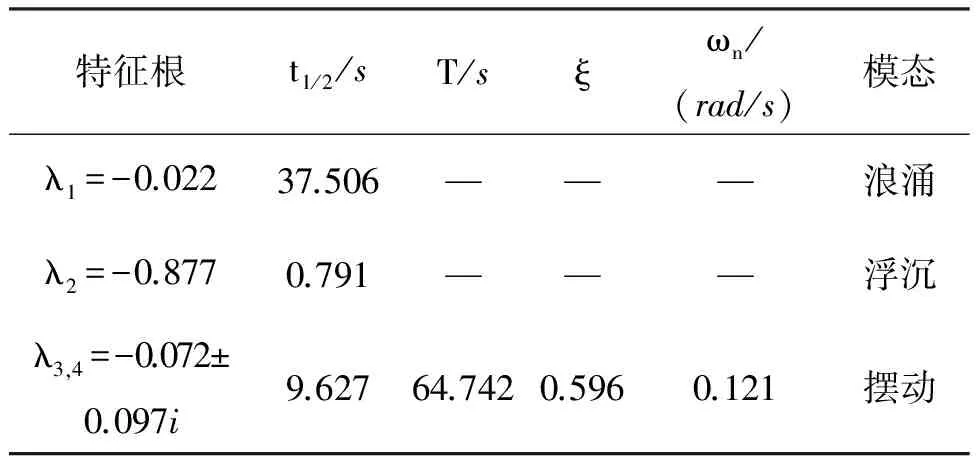
特征根t1/2/sT/sξωn/(rad/s)模態λ1=-0.02237.506———浪涌λ2=-0.8770.791———浮沉λ3,4=-0.072±0.097i9.62764.7420.5960.121擺動
對應于λ1的特征矢量為:
對應于λ2的特征矢量為:
對應于λ3,4的特征矢量為:
v3,4= [-0.041?0.077i0.995
0.003±0.004i0.011?0.039i]T
因為特征矢量僅提供狀態變量的相對變化信息,所以可按比值給出特征矢量,假定θ對應的特征矢量元素為1,則有:
v1=[833.333 0.333 0 1]T
v2=[8.527 30.138 0.878 1]T
λ3,4的特征矢量按比值給出時,可用幅值比及相位差表示為:
Δφ=[43.78° -74.24° 52.61° 0°]T
縱向運動的模態特征結構見表2。
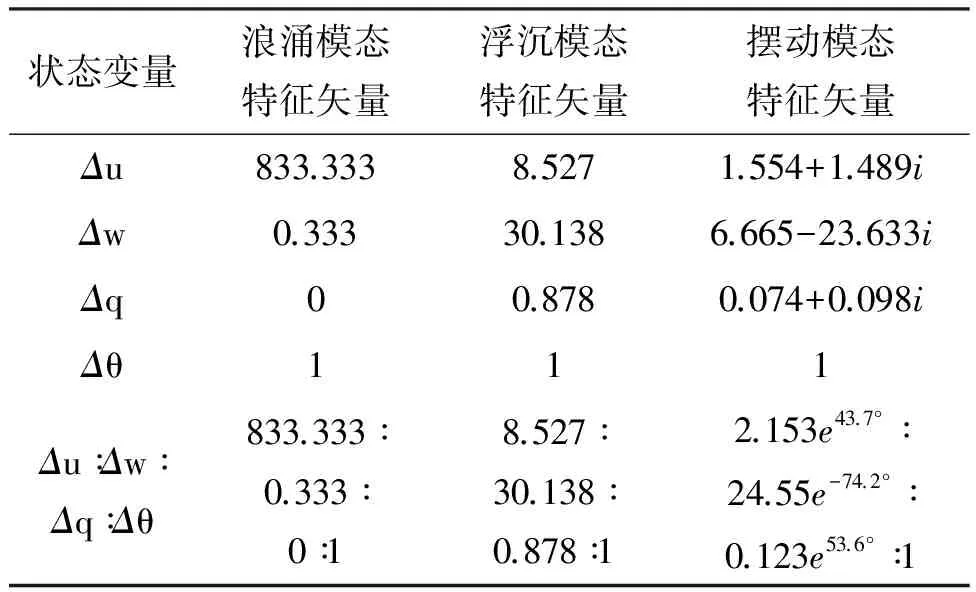
表2 縱向運動模態特征結構
3.2 橫側向運動模態

(28)

(29)
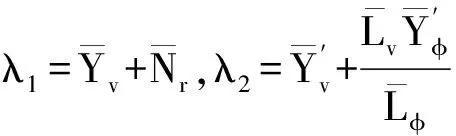
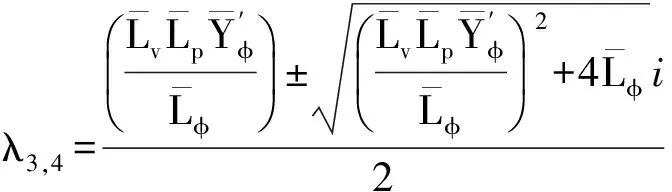
λ1=-0.127,λ2=-0.889,λ3,4=-0.149 ± 0.722i
根據橫側向運動方程的特征值,可將飛艇橫側向運動分為以下三個模態:
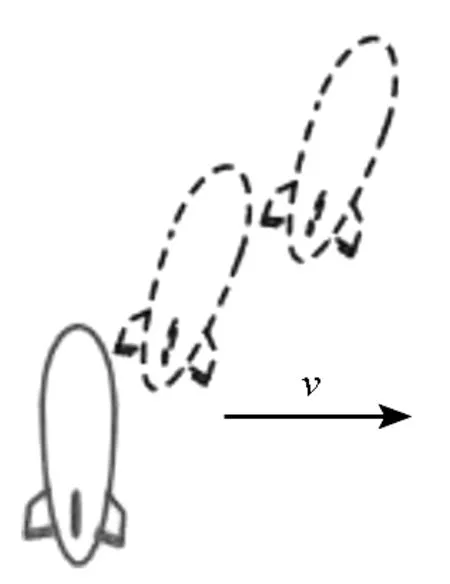
(a) 側滑衰減模態(a) Sideslip subsidence mode

(b) 偏航衰減模態(b) Yaw subsidence mode

(c) 滾轉振蕩模態(c) Roll oscillation mode圖4 橫側向運動模態示意圖Fig.4 Mode of lateral motion of airship
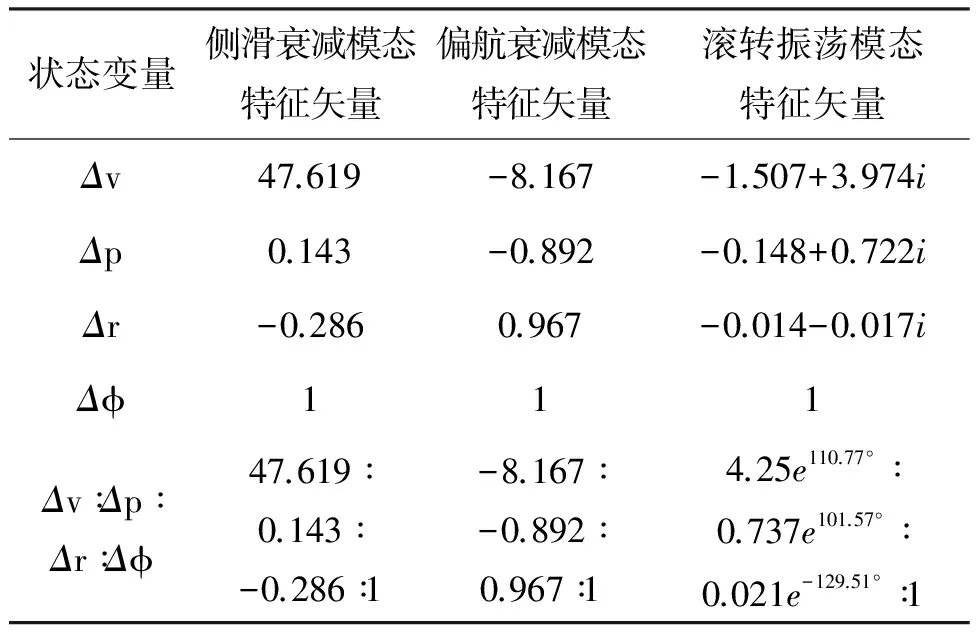
飛艇橫側向運動模態參數見表3[11]。飛艇橫側向運動的模態特征結構見表4。
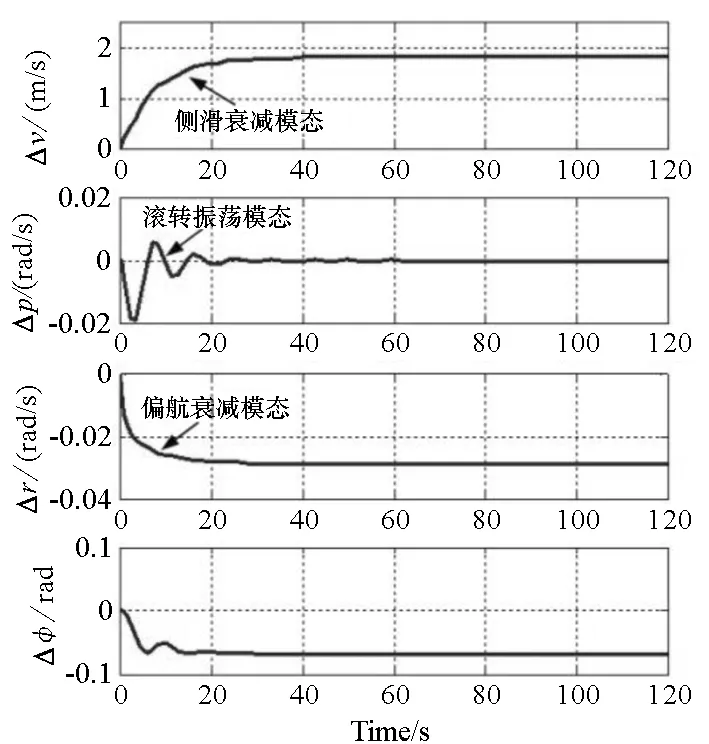
圖5 橫側向運動參數變化曲線Fig.5 Variables of lateral motion
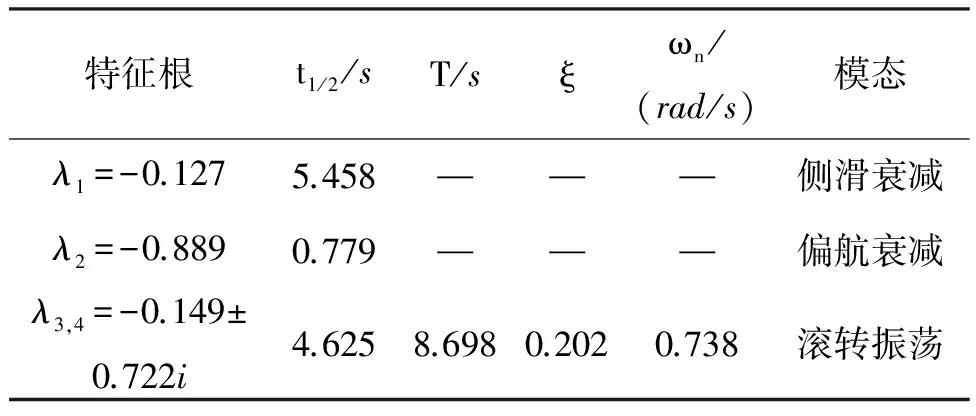
特征根t1/2/sT/sξωn/(rad/s)模態λ1=-0.1275.458———側滑衰減λ2=-0.8890.779———偏航衰減λ3,4=-0.149±0.722i4.6258.6980.2020.738滾轉振蕩
對應于λ1的特征矢量為:
v1=[-1 -0.003 0.006 0.021]T
對應于λ2的特征矢量為:
v2=[0.98 0.107 -0.116 -0.12]T
對應于λ3,4的特征矢量為:
v3,4 =[-0.959 -0.164±0.027i
假定φ對應的特征矢量元素為1,則有:
v1=[47.619 0.143 -0.286 1]T
v2=[-8.167 -0.892 0.967 1]T
λ3,4的特征矢量按比值給出時,可用幅值比及相位差表示為:
Δφ=[110.77° 101.57° -129.51° 0°]T
4 結論
本文系統研究了平流層飛艇的飛行模態。采用小擾動方法將非線性運動方程線性化解耦為縱向和橫側向運動方程,以便于采用解析法研究平流層飛艇的運動規律。定義了平流層飛艇的模態及模態參數,通過計算分析運動狀態方程的特征值和特征向量,研究了其飛行模態:縱向運動由浮沉、浪涌和擺動三種模態疊加而成,橫側向運動由偏航衰減、側滑衰減和滾轉振蕩三種模態疊加而成。平流層飛艇飛行模態分析為控制系統設計和飛行試驗提供了參考依據。此外,模態分析方法還可以拓展應用于高空氣球、浮升組合式飛艇等浮空器,豐富和發展了浮空器飛行力學理論方法,對推動臨近空間浮空器的發展應用具有重要價值。
References)
[1]WangWQ.Near-spacevehicles:supplyagapbetweensatellitesandairplanesforremotesensing[J].IEEEAerospaceandElectronicSystemsMagazine, 2011, 26(4): 4-9.
[2]YoungM,KeithLS,PancottiA.Anoverviewofadvancedconceptsfornearspacesystems[C]//Proceedingsof45thAIAAJointPropulsionConferenceandExhibit,Colorado,USA, 2009.
[3]KurkcuC,ErhanH,UmutS.Unmannedaerialsystems′nearspaceoperationconcept[C]//Proceedingsof5thInternationalConferenceonRecentAdvancesinSpaceTechnologies,Istanbul,Turkey, 2011.
[4]SchaeferI,KuekeR,LindstrandP.Airshipsasunmannedplatformschallengeandchance[C]//Proceedingsof1stAIAATechnicalConferenceandWorkshoponUnmannedAerospaceVehicles,Virginia,USA, 2008.
[5]MuellerJB,PaluszekMA,ZhaoYY.Developmentofanaerodynamicmodelandcontrollawdesignforahighaltitudeairship[C]//Proceedingsofthe3rdAIAAUnmannedUnlimitedTechnicalConference,WorkshopandExhibit,Chicago,USA, 2004.
[6] 歐陽晉, 屈衛東, 席裕庚. 平流層驗證飛艇的建模與分析[J]. 上海交通大學學報, 2003, 37 (6): 956-960.
OUYANGJin,QUWeidong,XIYugeng.Stratosphericverifyingairshipmodelingandanalysis[J].JournalofShanghaiJiaotongUniversity, 2003, 37 (6): 956-960. (inChinese)
[7]LiYW,NahonM.Modelingandsimulationofairshipdynamics[J].JournalofGuidance,ControlandDynamics, 2007, 30(6): 1691-1700.
[8] 楊躍能, 鄭偉, 吳杰. 臨近空間對地觀測平臺的矢量化建模及穩定性分析[J]. 國防科技大學學報, 2011, 33(3): 28-32.
YANGYueneng,ZHENGWei,WUJie.Vectormodelingandstabilityanalysisofanearspaceearthobservationplatform[J].JournalofNationalUniversityofDefenseTechnology, 2011, 33(3): 28-32. (inChinese)
[9] 王曉亮. 平流層對地觀測平臺非線性氣動力及其運動的研究[D]. 上海:上海交通大學,2006.
WANGXiaoliang.Researchonnonlinearaerodynamicsandmotionofastratosphericearthobservationplatform[D].Shanghai:ShanghaiJiaotongUniversity, 2006. (inChinese)
[10] 楊躍能. 平流層飛艇動力學建模與控制方法研究[D]. 長沙:國防科學技術大學, 2013.
YANGYueneng.Dynamicsmodelingandflightcontrolforastratosphericairship[D].Changsha:NationalUniversityofDefenseTechnology, 2013. (inChinese)
[11]KhouryGA,GillettJD.Airshiptechnology[M].USA:CambridgeUniversityPress, 1999.
[12]KulczyckiEA,JohnsonJR,BayardDS,etal.Onthedevelopmentofparameterizedlinearanalyticallongitudinalairshipmodels[C]//ProceedingsofAIAAGuidance,NavigationandControlConferenceandExhibit,Honolulu,Hawaii, 2008.
[13]EricA,KulczyckiSM,KoehlerAE,etal.Developmentofananalyticalparameterizedlinearlateraldynamicmodelforanaerobotairship[C]//ProceedingsofAIAAGuidance,Navigation,andControlConference,Oregon,USA, 2011.
[14]EtkinB,ReidLD.Dynamicsofflight:stabilityandcontrol[M]. 3rded.USA:Wiley, 1996.
[15] 方振平, 陳萬春, 張曙光. 航空飛行器飛行動力學[M]. 北京: 北京航空航天大學出版社, 2005.
FANGZhenping,CHENWanchun,ZHANGShuguang.Flightcontrolofaircraft[M].Beijing:BeijingUniversityofAeronauticsandAstronauticsPress, 2005. (inChinese)
[16] 吳森堂, 費玉華. 飛行控制系統[M]. 北京: 北京航空航天大學出版社, 2005.
WUSentang,FEIYuhua.Flightcontrolsystem[M].Beijing:PressofBeijingUniversityofAeronauticsandAstronautics, 2005. (inChinese)
[17] 胡壽松. 自動控制原理[M].5版. 北京: 科學出版社, 2007.
HUShousong.Automaticcontroltheory[M]. 5thed.Beijing:SciencePress, 2007. (inChinese)
Flight mode analysis for stratospheric airships
YANG Yueneng, ZHENG Wei, YAN Ye, SHAO Hanbin
Theaerodynamicshape,overalldesignandoperationprincipleofstratosphericairshipsaredifferentfromtheconventionalaircraftssuchasairplaneandmissile,andtheflightmechanism.Thedynamicscharacteristicsofthestratosphericairshiparedifferentfromtheconventionalaircrafts.Therefore,theinherentmechanismandcharacteristicsofthestratosphericairshipneedtobefurtherinvestigated.Thelinearizationequationsofmotionforstratosphericairshipwerederivedbyusingthe“smalldisturbance”theory,whichcouldbedividedintolongitudinalmotionandlateral-directionalmotion.Thefightmodesandmodeparametersweredefined,andananalyticalmethodwasproposedtoanalyzetheflightdynamics.Flightmodesofthestratosphericairshipwereinvestigatedbasedoneigenvalueandeigenvectorofthestateequations.Resultsshowthatthelongitudinalmotionincludesthreemodes:heavemode,surgemodeandpendulummode,whereasthelateralmotionincludesanotherthreemodes:yawmode,sideslipmodeandrolloscillationmode.
flightdynamics;stratosphericairship;motionequations;flightmode;eigenvector
2014-12-24
國家自然科學基金資助項目(11502288)
楊躍能(1984—),男,湖南邵陽人,講師,博士,E-mail:yangyueneng@163.com
10.11887/j.cn.201504010
http://journal.nudt.edu.cn
V
A
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39