基于無線通信網絡的多智能車速度一致性控制系統
2015-11-08 02:06:09戴俊瞿成明郝玲玲喬永明
重慶理工大學學報(自然科學) 2015年4期
戴俊,瞿成明,郝玲玲,喬永明
(安徽工程大學電氣工程學院,安徽蕪湖241000)
基于無線通信網絡的多智能車速度一致性控制系統
戴俊,瞿成明,郝玲玲,喬永明
(安徽工程大學電氣工程學院,安徽蕪湖241000)
將一致性理論應用到多智能小車的速度一致性控制中。首先分析了多智能小車速度一致性的采樣、量化算法;然后基于此理論設計了智能小車控制系統,并利用模塊化理念設計了ZigBee無線通信、電機驅動、SD卡速度存儲及速度顯示等硬件模塊,實現了多智能車速度一致性控制的采樣、量化程序,以及多車間信息交互的通信協議等。實驗結果表明:基于一致性理論的多智能小車實現了速度的一致性控制。
多智能車;速度一致性控制;采樣;量化;通信協議
一致性問題主要是研究如何利用多智能體系統中個體之間有限的信息交換來設計算法,使得所有的智能體達到某種同一狀態。對多智能體一致性的研究大多處于理論研究階段,實際的應用研究還很少。
單智能體的研究已經較完善,但單智能體應用有很多局限性,在很多需要團體合作完成任務的情況下已經不能勝任[1]。本文描述的智能協同控制系統將多智能體一致性控制理論應用于實際模型。多個小車在完全獨立的情況下,通過之間的耦合通信進行信息交流,相互之間進行速度一致性協同控制,共同配合完成速度一致性控制任務[2]。這種模型實現后,可以在此基礎上完成更加復雜的任務,具有廣泛的應用前景[3]。
1 一致性控制算法分析
圖論是分析一致性問題的重要工具[4],它表明了智能體間信息交換的規則。在由N個智能小車組成的多智能小車系統中,每輛小車分別用v1、v2、…、vn表示,車的集合為V={v1,v2,…,vn},邊的集合為E?V×V,加權鄰接矩陣A=[aij],aij>0,如果智能小車vj存在一個指向vi的通信連接,即(vi,vj)=eij∈E、aij>0,智能小車i能從智能小車j獲取速度信息,多智能智能小車的通信拓撲可以表示為G=(V,E,A)。
對于連續時間的二階多智能體系統,通過離散化,系統被精確地離散化為[5-6]:
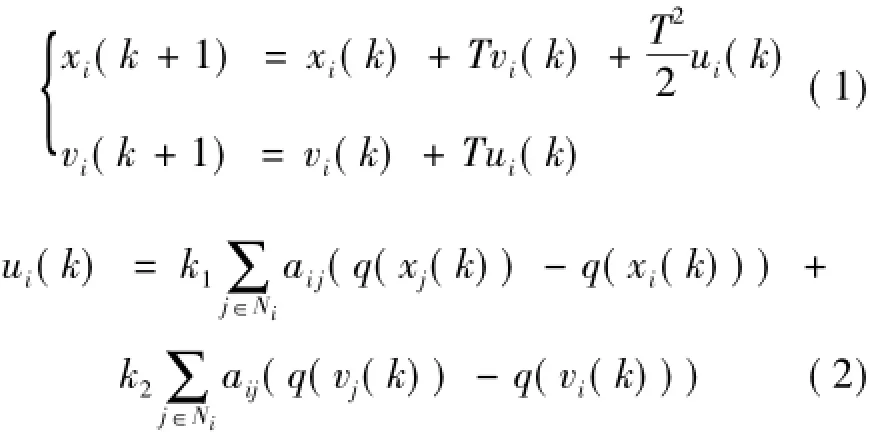
其中:aij為加權鄰接矩陣的元素,i∈v,xi(k),vi(k)分別表示第i個智能小車在k時刻的位置信息和速度信息。k1,k2為控制參數,且k1>0,k2>0,
假定待量化的值y∈[-U,U],由于傳輸帶寬的限制只能傳送長度為1的數據,因此就有2l個量化點,量化間隔Δ=,概率量化規則如下[7]:

其中q(y)表示y量化后的量化值。取概率較大者為當前的量化值。
定理[3]:若有向圖含有有向生成樹,基于采樣數據的多智能體系統能夠達到量化一致[8],當且(T,k1,k2)僅當滿足

其中

多智能車間通信拓撲結構如圖1所示,圖2為系統的拉普拉斯矩陣。
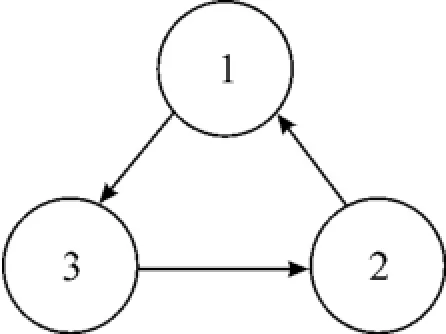
圖1 多智能車通信拓撲結構
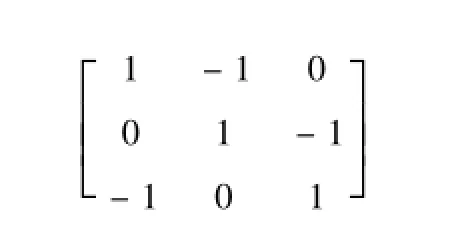
圖2 系統拉普拉斯矩陣
選取k1=3,k2=3,T=0.05 s,滿足定理的要求,量化間隔Δ=0.001,初始速度和位置分別為[x1(0),x2(0),x3(0)]=[0,0,0],[v1(0),v2(0),v3(0)]=[6,16,17]。此系統的速度和位置分別最終收斂到pTx[0]+kTpTv[0]=0.65k和 pTv[0]=13,其中p=多智能小車速度一致性仿真如圖3所示。
算法1是一個二階系統,在本文中只研究小車的速度一致性控制,并且假設3輛智能小車的初始位置都為0。
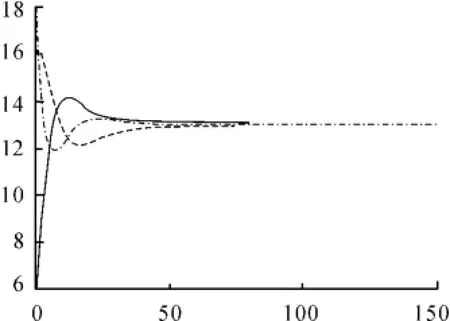
圖3 多智能小車速度一致性仿真
采樣周期T=0.05 s(不宜選取過大)。當采樣周期T選取較大值時雖然系統能夠達到一致,但是相鄰兩次迭代時速度變化較大。當對實際小車速度進行控制時,小車由于需要一定的反應時間,速度變化較大時小車來不及動作,當T越小時越接近連續狀態,符合實際小車的速度變化,但是T越小則收斂到一致的時間就會越長,因此選取T=0.05 s較為合適。
量化間隔選取Δ=0.001。從理論上講,Δ越接近于0收斂到一致的效果越好,然而實際中,Δ越小會帶來傳輸位數的增加,因而會增加通信量。本文設計的通信協議如表1,速度信息表示為長度最大為12的字符串,小車的初始速度最大為17,最終趨于一致13,收斂到一致過程中最大傳輸的速度為17。選取量化間隔為Δ=0.001,經量化后的最大傳輸的數據為=17 000,長度為5,小于12,符合實際傳輸要求。
2 系統總體設計方案
系統中使用智能小車作為單個節點,整個系統包括3輛完全相同的智能小車。根據小車的光電編碼器獲取小車的速度信息,各個智能小車通過ZigBee無線通信模塊實現速度信息的協商,通過程序的一致性分析處理發送控制命令到小車的執行機構——直流電機驅動器,使智能小車對自身速度進行自主決策和控制[9],最終實現多智能小車的速度一致性控制。系統框圖如圖4所示。
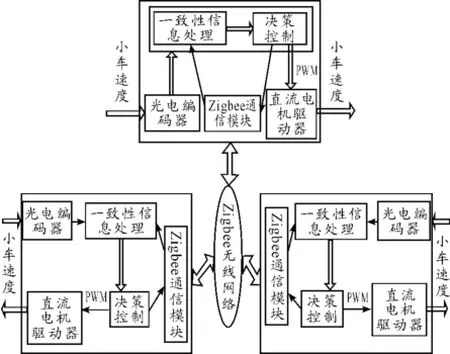
圖4 多智能車系統框圖
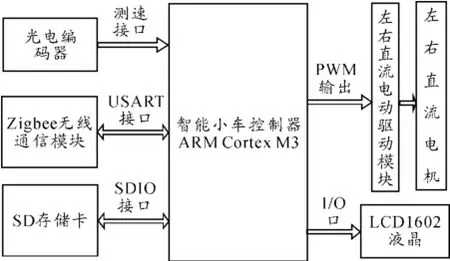
圖5 智能小車設計方案
在系統中,智能小車的速度是研究的狀態量。在小車開始運動時,通過STM32F103VET6控制器從智能小車光電編碼器中采集速度信息,經過一致性處理后,通過I/O口輸出給LCD1602顯示模塊,通過UART輸出給ZigBee無線收發模塊,再將速度信息存儲在本地SD卡中進行詳細分析。智能車的硬件設計采用模塊化設計理念[10],智能小車設計方案如圖5所示。
2.1智能小車控制模塊
智能小車控制模塊由處理器模塊和電機驅動器組成,主要作用是對ZigBee無線網絡接收的其他小車速度信號與本地小車速度信號進行一致性耦合運算,得出下一時刻小車的速度,將與小車速度呈比例的PWM信號輸出給智能小車的電機驅動器(PWM的占空比對應小車速度),由此控制小車的運動速度。處理器模塊是智能小車的“大腦”,用于接收速度信息和發出控制命令,選用基于ARM Cortex M3內核的STM32F103VET6單片機。
2.2智能小車通信模塊
智能小車通信模塊主要是用來發送本地智能小車的速度信息和接收其他智能小車的速度信息,采用ZigBee模塊實現。在多智能小車同時運行時,每輛小車的ZigBee模塊都要發送本地小車的速度信息,同時以中斷的方式接收其他小車的速度信息。Zigbee模塊以廣播方式發送信息時時延較大,以點對點通信則時延小。本文針對一致性算法不同的通信拓撲,通過X-CTU軟件設置每個節點的目的地址[11],采用圖1的通信拓撲。
智能車1只能接收2的速度信息,智能車2只能接收3的速度信息,智能車3只能接收1的速度信息,因此智能車1的ZigBee模塊的目的地址設為智能車3的ZigBee模塊地址,智能車2的Zig-Bee模塊的目的地址設為智能車1的ZigBee模塊地址,智能車3的ZigBee模塊的目的地址設為智能車2 ZigBee模塊地址。
stm32的UART發送、接收數據寄存器最大為9位(表示的最大數為512)。然而根據前面的內容,當量化間隔取得足夠小時,發送和接受的數據會超過9位,因此一次不能完成數據收發任務,需設計相應的通信協議,以字符串的形式發送。當速度達到一致時,不僅要發送速度信息,還要發送位置信息,因此在發送時需要區分速度信息與位置信息。發送速度信息格式如表1。
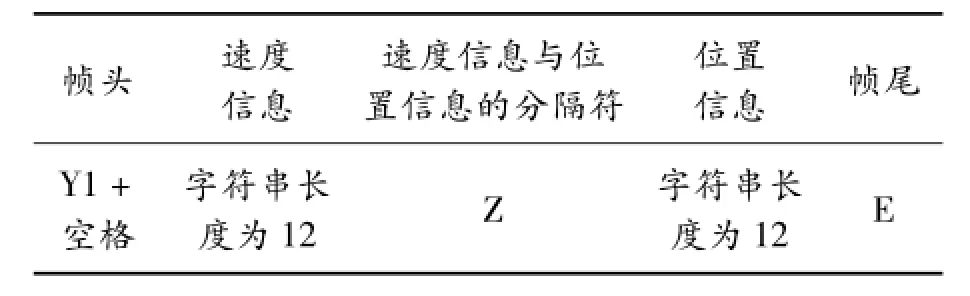
表1 發送速度信息格式
若小車當前量化后的速度信息值為100,位置信息為200,發送字符串Y1 000000000100Z00000 0000200E。接收方接收時進行判斷,當接收到第一個字符為Y,第二個字符為1,最后一個字符為E時表明接收了一個有效速度信息,則將速度值和位置值提取出來進行一致性耦合計算以決定下一時刻的小車速度。
2.3測速模塊
利用stm32定時器T2外部脈沖計數功能,完成轉速采集以及速度的計算,光電編碼器的脈沖跳變觸發了定時器計數功能,脈沖個數就表征了小車速度。由于實際系統中有干擾的存在,光電編碼器產生的并非標準的方波,故在速度過快時將會帶來較大的影響。利用stm32定時器對外部脈沖計數信號的濾波功能,能濾除高頻分量的干擾。經過實驗測試發現,當ExtTRGFilter=0xF時,小車速度的測量值穩定、準確。
3 系統的軟件設計
前面對多智能車算法的研究都假設各個智能車的速度更新是同步的[12],這就需要在各個智能車間設置一個同步時鐘[13],而實際中這個時鐘是不存在的,因而在硬件實現時很難保證各個智能車速度更新是同步的。為了解決這一問題,在軟件編程中做了相應改變。在軟件編程時先由1節點發起通信,定時2 s發送小車的速度和位置信息,在小車3串口中斷接收到信息后進行一致性處理,之后將車3的速度和位置信息發送給車2,車2串口中斷接收到信息后進行一致性處理,之后將車2的速度和位置信息發送給車1。在軟件編程時,小車1要既能實現定時串口發送也能實現串口中斷接收,由小車1發起整個小車系統的速度一致性控制,小車2、小車3能實現串口中斷接收,進行一致性處理后,在串口中斷中發送本小車的速度和位置信息。
整個系統的軟件結構見圖6。
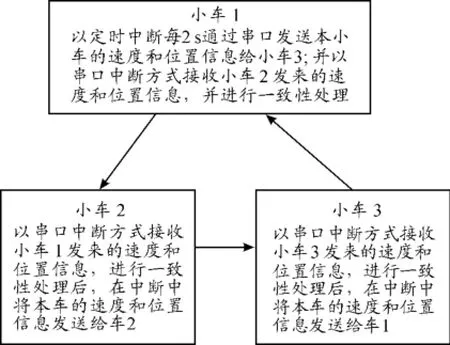
圖6 整個系統的軟件結構
3.1量化算法程序設計
小車1定時器產生2 s中斷,在中斷處Zigbee模塊按照表1的格式每秒發送一次速度信息。根據通信拓撲結構,只有特定目的地址的ZigBee節點才能接收,在發送前需要對速度值按照前面的方法進行量化。車2、車3在串口接收中斷處發送量化信息,量化算法如下:
q=floor(speed/g);//g為量化間隔,speed為光電編碼器測量的速度值,floor為向下取整函數。
if((speed-q*g)>(g+q*g-speed))//依據第四章的概率量化方法
{sudu=(q+1);}else
{sudu=q;}
q1=floor(position/g);position為當前小車位置值
if((position-q1*g)>(g+q1*g-position))
{weizhi=(q1+1);}
else
{weizhi=q1;}
3.2一致性速度處理模塊程序設計
接收到量化的速度信息值后需要將其還原為原有的速度值,因此需要乘以量化間隔,然后進行一致性處理,算法程序如下[14]:
speednext=T*k2*(-speedcurrent+ suduother)+speedcurrent+T*k1*(-positioncurrent+weizhiother),
weizhinext=position current+T*speedcurren +0.5*T*T*k2*(-speedcurrent+suduother)+0.5T*T*k1*(-positioncurrent+weizhiother);
算法程序中的speednext為下一時刻小車速度,weizhinext為下一時刻小車的位置,positioncurrent為當前小車位置,speedcurrent為當前小車速度,suduother=(sudu*g),weizhiother=(weizhi* g)為其他小車發來的速度值,T為采樣間隔,通過此式計算出下一時刻小車的速度。
4 系統的硬件實現
先讓3輛小車以各自的速度單獨運行一段時間后,通過先前設定的網絡目的地址發送速度信息,并接收其他小車速度信息,按照一致性處理算法進行耦合[15],小車的速度會慢慢趨于一致。3輛小車的速度數據分別存在各自的SD卡中,最終結果如圖7所示。1號小車初始速度為6,2號小車初始速度為16,3號小車初始速度為17。
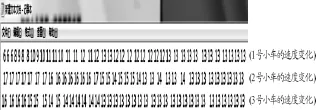
圖7SD卡中存儲的3輛小車的速度
從圖7看到小車的速度逐步向給定的三車初始平均速度逼近,數據在中間有一些波動,最終穩定在13。波動的出現是因為電壓和電機速度的非線性、硬件的延遲、干擾以及算法的近似等原因造成的。
5 結束語
本文將一致性算法應用到小車的速度一致性控制方面,完成了硬件平臺的搭建和軟件的編程。在3輛小車的速度一致性控制實驗中,通過對實驗數據的分析,速度一致性控制得到驗證,且較為可靠。在當前的基礎上可以進一步實現小車的速度、位置一致性,進而達到多智能小車編隊控制的目的。本系統作為一個基于無線通信網絡的多智能小車一致性協作控制研究實驗平臺具有十分重要的參考意義。
[1]張慶杰,朱華勇,沈林成.多智能體一致性理論研究進展[J].中國制導、導航與控制學術會,2010.
[2]Qu C M,Dai J,Jiang M.Consensus based speed control strategies for Multi-Agent car with state predictor[J]. Proceedings of 2013 IEEE 11thInternational Conferenceon Electronic Measurement&Instruments,Vol.02,August.2013.
[3]Liu Y,Jia Y.An Iterative Learning Approach to Formation Control of Multi-Agent Systems[J].Systems&Control Letters,2012,61(1):148-154.
[4]Ren W,Cao Y C.Distributed Coordination of Multiagent Networks[M].London:Springer-Verlay,2011.
[5]Ren W,Cao Y.Convergence of sampled-data consensus algorithms for double-integrator dynamics[J].IEEE Conf.Decision Control,Dc.9-11,2008:3965-3970.
[6]李曉波.多智能體采樣及量化一致性[D].西安:西安電子科技大學,2013.
[7]Guan Z H,Meng C,Liao R Q,et al.Consensus of secondorder multi-agent dynamic systems with quantized data[J].Physics Letters A,2012,376(4):387-393.
[8]Li S,Du H,Lin X.Finite-Time Consensus Algorithm for Multi-Agent Systems with Double-Integrator Dynamics[J].Automatica,2011,47(8):1706-1712.
[9]Dimakis A G,Kar S,Moura J M F,et al.Gossip Algorithms for Distributed Signal Processing[J].Proceedings of the IEEE,2010,98(11):1847-1864.
[10]申忠宇,鄭啟文.無線通信網絡的多智能小車編隊控制系統[J].東南大學學報,2013,43(1):18-21.
[11]Xie G M,Liu H Y,Wang L,et al.Consensus in Networked Multi-Agent Systems via Sampled Control:Fixed Topology Case[C]//In Proceedings of the Americain Control Conference.[S.l.]:[s.n.],2009:3902-3907.
[12]祖麗楠,田彥濤,梅昊.大規模多移動機器人合作任務的分布自主協作系統[J].機器人,2006,28(5):470 -477.
[13]Xiao F,Wang L.Asynchronous Consensus in Continuous-Time Multi-Agent Systems with Switching Topology and Time-Varying Delays[J].IEEE Transactions on Automatic Control,2008,53(8):1804-1816.
[14]李德全.有向網絡多個體系統的量化與魯棒一致性研究[D].上海:上海交通大學,2012.
[15]洪奕光,翟超.多智能體系統動態協調與分布式控制設計[J].控制理論與應用,2011,28(10):1506-1512.
(責任編輯楊黎麗)
Consitency Control System of Multi-Agent Car Speed Based on Wireless Communication Network
DAI Jun,QU Cheng-ming,HAO Ling-ling,QIAO Yong-ming
(School of Electrical and Information Engineering,Anhui Polytechnic University,Wuhu 241000,China)
Abstract:This paper applied consistency theory to speed consensus algorithm of multi-agent car system.The multi-agent car system based on former consensus algorithm was studied.Firstly,multi-intelligent vehicle speed consistency of sampling and quantization algorithm was analyzed. Intelligence car control system was designed based on the above theory.The ZigBee wireless communications,motor drivers,sd card speed memory,speed display modules and other hardware modules,sampling and quantitative procedures of multi-agent car's speed consistency control,mutil-workshop information interactive communication protocol and so on were designed based on module designed concept.The experimental results show that multi-agent car based on consistency realizes the speed consitency control.
multi-agent car;consitency of speed control;sampled-data;quantized-data;communication protocol
TN92
A
1674-8425(2015)04-0107-06
10.3969/j.issn.1674-8425(z).2015.04.021
2015-01-22
安徽省高等學校省級自然科學研究項目“基于DSP的多電機同步網絡控制研究”(KJ2011A029)
戴俊(1990—),男,安徽桐城人,碩士研究生,主要從事多智能體一致性的研究。
戴俊,瞿成明,郝玲玲,等.基于無線通信網絡的多智能車速度一致性控制系統[J].重慶理工大學學報:自然科學版,2015(4):107-112.
format:DAI Jun,QU Cheng-ming,HAO Ling-ling,et al.Consitency Control System of Multi-Agent Car Speed Based on Wireless Communication Network[J].Journal of Chongqing University of Technology:Natural Science,2015(4):107-112.
猜你喜歡
公民與法治(2022年5期)2022-07-29 00:47:28
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中華手工(2017年2期)2017-06-06 23:00:31
燕山大學學報(2015年4期)2015-12-25 02:19:49
中外會展(2014年4期)2014-11-27 07:46:46