數字式高炮身管疵病探測儀的設計
2015-11-11 01:32:13張振友楊岐子于政慶張天文
兵工學報 2015年4期
關鍵詞:測量
張振友, 楊岐子, 于政慶, 張天文
(1.防空兵學院 彈炮一體系, 河南 鄭州 450052; 2.防空兵學院 高炮系, 河南 鄭州 450052;3.防空兵學院 基礎部, 河南 鄭州 450052;4.防空兵學院 科研部, 河南 鄭州 450052)
?
數字式高炮身管疵病探測儀的設計
張振友1, 楊岐子2, 于政慶3, 張天文4
(1.防空兵學院 彈炮一體系, 河南 鄭州 450052; 2.防空兵學院 高炮系, 河南 鄭州 450052;3.防空兵學院 基礎部, 河南 鄭州 450052;4.防空兵學院 科研部, 河南 鄭州 450052)
高炮射擊時身管疵病會對火炮的射擊精度和使用安全造成重大影響,應用光機電控制技術和CCD成像技術,結合炮膛結構特點設計了高炮身管疵病探測儀。該裝置通過多攝像頭組合,實現了360°全景成像,觀察內膛表面形貌,對身管內膛表面進行定性及定量檢測,具有疵病自動定位、疵病類型自動比對、大小自動測量等功能。系統可在驅動裝置的驅動下沿著身管軸線移動,對炮膛表面疵病進行有效地識別和綜合評定。
兵器科學與技術; 疵病; 探測; 高炮身管; CCD
0 引言
高炮射擊時,身管不僅要承受高溫高壓火藥燃氣的沖刷和化學作用,還要承受高速運動彈丸的摩擦作用,由此產生的疵病多達十幾種。隨著身管射擊彈數的累積,內膛燒蝕磨損量不斷增加,會導致膛壓下降,初速降低,彈丸在膛內運動時擺動,飛離炮口瞬間起始擾動增大,使射彈散布顯著變大、命中概率降低。有些疵病如陽線斷脫、燒蝕溝、龜裂、沖凹等,即使面積不大,當達到一定量時也會對身管的結構完整性、剛度和強度造成嚴重影響,如果不能及時準確地對疵病做出判斷和處理,可能會導致炮彈卡滯或膛炸等現象的發生,對火炮的使用安全造成重大影響[1-3]。對疵病進行有效地識別和判定,是進行身管質量評估的基礎。按照《GJB2977A—2006火炮靜態檢測方法》的規定[4],在部隊實際使用和生產過程中應對身管內壁形貌的破壞情況進行定量測量,這對掌握火炮的精度、初速、射速、壽命等戰術技術指標的變化和射擊安全性進行評價具有重要的作用。目前,基層分隊對高炮身管疵病檢查主要通過光學窺膛鏡依靠目測進行[5],僅能判斷身管內是否有異物、銹蝕等明顯的疵病,不能進行定量測量,自動化程度低,不易推廣使用。
1 總體方案設計
探測儀硬件主要由光電窺膛頭、步進電機傳動機構、主控單元等部分組成,如圖1所示。軟件程序基于Windows XP平臺,利用面向對象的Visual C++語言進行模塊化程序設計,主要由傳動機構控制模塊、圖像采集模塊、疵病測量模塊、疵病庫管理模塊、疵病模糊識別模塊、測量報告生成模塊等組成。
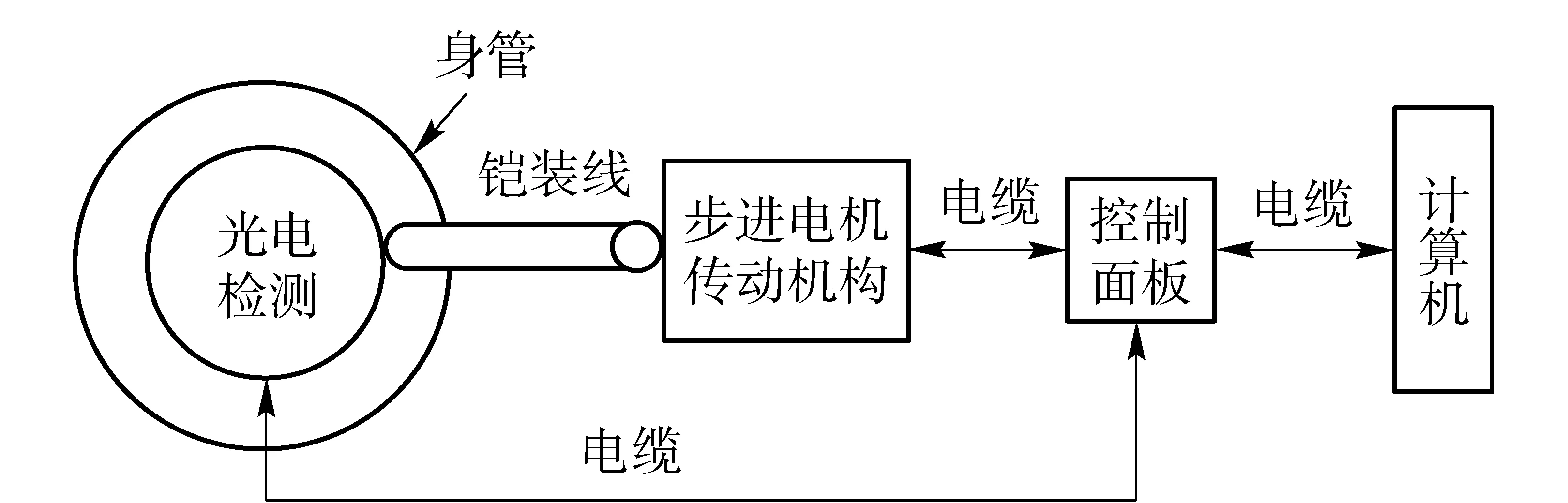
圖1 系統組成Fig.1 System structure
光電窺膛頭用于完成光學信號的讀取和光電轉換,將炮膛表面形貌轉換為圖像信息,主要由內窺鏡模組、定心機構和照明光源等組成。
步進電機傳動機構用于推動光電窺膛頭沿炮膛軸線方向前后運動,運動速度150~200 mm/min、運動位移范圍0~3 m、位移分辨率為10 mm,由身管夾具、步進電機及其驅動控制電路和鎧裝線等組成。鎧裝線通過錐形接頭與光電窺膛頭連接,步進電機控制鎧裝線的運動方向和速率,實現光電窺膛頭的軸向直線運動。由于鎧裝線的柔性和剛性適中、盤繞方便,可減小傳動機構的尺寸,使探測儀具有很好的便攜性。
主控單元主要由控制面板、圖像采集卡、主控計算機等組成,用于實現光電窺膛頭運動速度、位移的控制,具有圖像顯示、疵病類型的比對和大小測量,自動生成和打印檢測報告等功能。
檢測時,將傳動機構固定在炮口前端,把光電窺膛頭插入炮膛內,鎧裝線夾在主動和從動摩擦輪之間,系統工作原理如圖2所示。通過控制面板或計算機軟件控制步進電機的運動方向和速度,經過主、從摩擦輪驅動鎧裝線使光電窺膛頭運動。
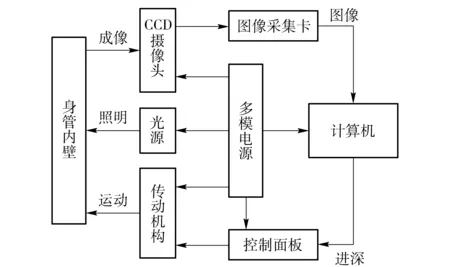
圖2 系統工作原理框圖Fig.2 Working principle block diagram of system
照明光源照亮炮膛內表面,被測面的反射光束經平面反射鏡成像在CCD攝像機的光敏面上,將疵病的光學圖像變換成視頻信號,進行存儲和抓拍。檢測人員利用軟件對可疑疵病進行標識和測量后,自動生成分項和綜合檢測報告。由于一路攝像頭的視場有限,需對多路攝像頭的視場進行合理拼接,實現360°全景成像。
2 光電窺膛頭設計
光電窺膛頭是檢測系統的核心部件,用于采集炮膛表面影像,主要由CCD攝像頭、定心機構、照明光源、窺膛組件、套筒組合等組成。由于身管內膛狹小、孔深且光照度不足,考慮到成像需有足夠的清晰度和景深,設計光電窺膛頭時將CCD攝像頭、照明光源和45°反射棱鏡組成的窺膛組件置于一套筒內,套筒通過錐狀連接臺前端螺紋連接于鎧裝線,隨鎧裝線在炮膛內運動。為保證窺膛時光電測量頭始終處于炮管軸心線上,還在套筒前后兩端設計了定心機構。
2.1CCD攝像系統設計
2.1.1CCD攝像頭的選擇
系統選用適合于深孔探測的超小型內窺鏡模組,其外形為圓柱體,直徑7 mm,長23 mm. 采用1/5″CMOS CCD芯片,標準PAL制式視頻信號輸出,最高像素可達到420 000;每秒輸出50幀,無拖尾現象,鏡頭視場為60°,鏡頭光圈為F2.8.
2.1.2CCD鏡頭安裝方向設計
光電窺膛頭沿身管軸線方向移動,受攝像頭結構及電纜的制約,采用攝像頭沿炮膛軸線方向安裝,即對正前方成像,如圖3所示。為在有限的成像區域內獲取盡可能多的身管內壁有效信息,需要利用反射鏡把照射到身管內壁上的光線反射到CCD上,將光軸方向由徑向轉為軸向,為結構設計提供了很大便利。

圖3 光學系統結構示意圖Fig.3 Structure diagram of optics system
2.1.3CCD攝像頭視場拼接設計
一個CCD攝像頭視場為60°,本系統采用多路CCD視場拼接技術,實現圓柱形身管360°全景成像。
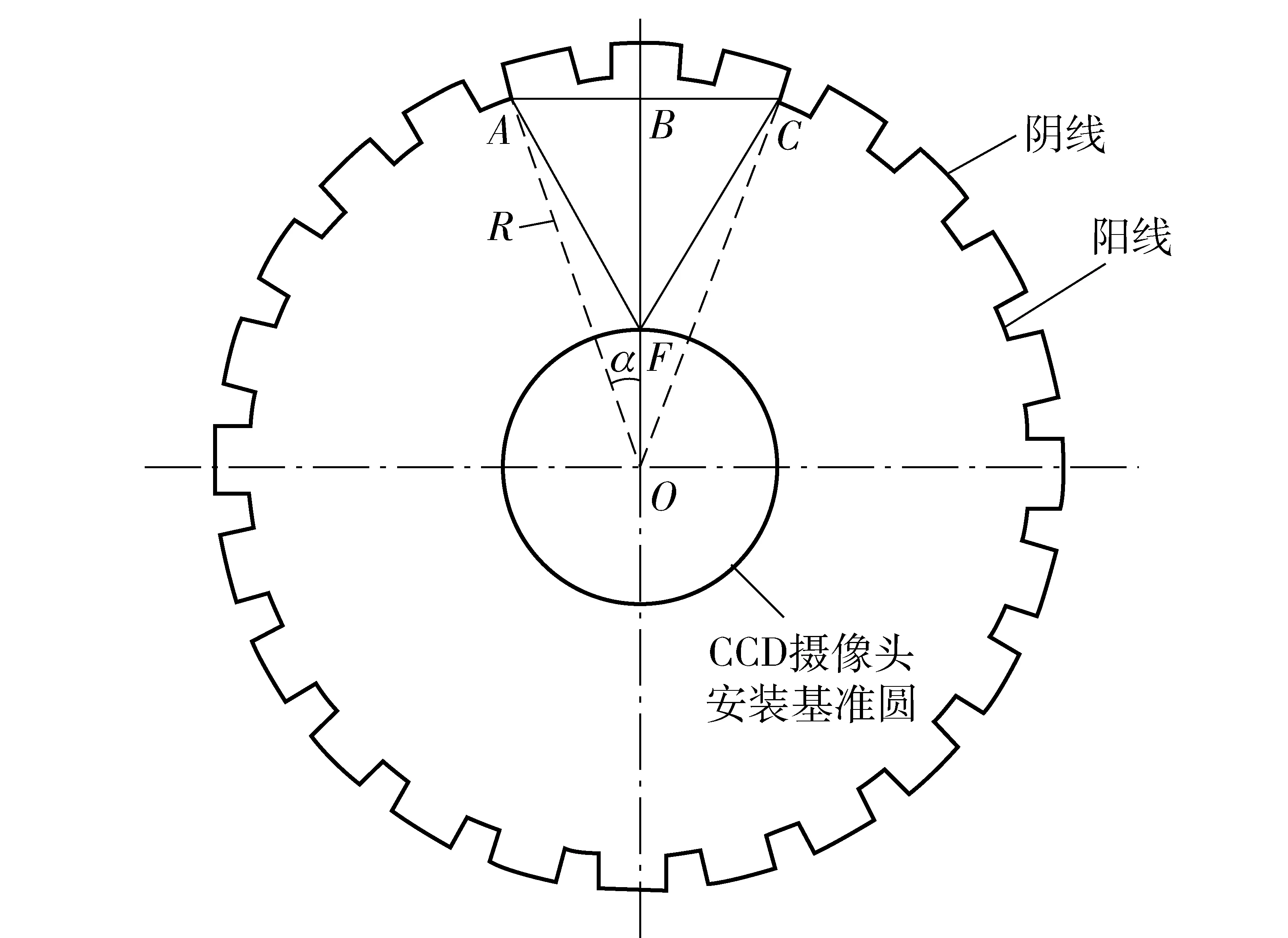
圖4 攝像頭視場計算Fig.4 Calculation of camera filed of view
炮膛橫截面如圖4所示,其中,O點為炮膛中心點,火炮口徑為2R,即OA=R;F點為CCD攝像頭焦點,CCD攝像頭焦點距炮膛軸線距離r為2.5 mm,即OF=2.5 mm;視場角∠AFC為60°,設∠AOB=α.
由圖4知:
OB=OF+FB.
(1)
在Rt△ABO中
AB=OAsinα,
(2)
OB=OAcosα.
(3)
在Rt△ABF中
FB=ABcot30°=OAsinαcot30°.
(4)
將(2)式、(3)式、(4)式帶入(1)式得
OAcosα=OF+OAsinαcot30°.
(5)

(6)
對于25 mm、35 mm、37 mm和57 mm口徑的高炮而言,按照(6)式計算得到2α分別為48.52°、51.81°、52.25°和54.79°,因此采用60°視場的攝像頭時,為了能夠全景成像,分別至少需要8個、7個、7個和7個攝像頭。
由于存在機械加工誤差和CCD視場畸變,很難保證每個攝像頭相鄰部分完全相切,因此本系統采用9個攝像頭,分3層進行安裝,使每個攝像頭與相鄰兩側的攝像頭視場有一定的交叉,能保證在360°檢測時不會有死角,攝像頭的分布如圖5所示。

圖5 光電窺膛頭攝像頭分布圖Fig.5 Camera distribution of photoelectric detector
圖5(a)中的陰影部分是相鄰2個攝像頭視場的交叉部分,圖5(b)、圖5(c)、圖5(d)分別是第1層、第2層、第3層攝像頭的分布圖,每層的3個攝像頭都分布在以光電窺膛頭的軸線為圓心的圓周上。
2.2照明光源設計
照明光源的功能是為CCD攝像頭提供足夠的照度,保證圖像質量[3]。由于陰陽膛線的相互遮擋使其光路極為復雜,亮度不夠則看不清楚,太亮則使圖像一片白,為此本系統采用深孔照明技術,使用軸向和徑向分布式光源。軸向采用6個大散射角、高亮度、純白發光、冷光源LED組成照明光源均勻地布置在每個攝像頭前端,沿軸向均勻分布,徑向采用3個LED燈均勻布置在反射鏡的四周,光線射向身管內壁,起到補光的作用。通過光線的散射和反射,不僅解決單個光源亮度不夠的問題,而且避免了局部高亮的問題,實現均勻照明,保證攝像頭采集的畫面清晰,照度均勻。
2.3定心機構設計
定心機構的作用是在窺膛過程中,使光電窺膛頭沿某一固定陰線前后運動,保持CCD攝像頭物距不變,視場變化與膛線纏度變化一致,使攝像頭視場與陽線(陰線)一一對應。定心機構位于光電窺膛頭的前后兩端,由銅質套環和萬向滾珠組成,前端套環與光電窺膛頭之間可以軸向轉動,以適應膛線纏度的變化要求。在銅質套環上加工有三段圓弧狀凸起,其徑向尺寸與身管陰線直徑相匹配,寬度與陰線寬度相匹配,凸起圓弧上嵌入萬向滾珠,滾珠在工作時嵌入炮膛內壁陰線槽內,使光電窺膛頭始終處于火炮身管的軸線上,保證測量的準確度。
3 軟件設計
探測儀軟件部分包括疵病庫管理模塊、疵病自動比對模塊、疵病測量模塊和測試報告生成模塊,它具有運動控制、圖像采集與回放、疵病測量、疵病庫管理、自動生成測試報告等功能。
3.1疵病庫管理模塊
本系統采用Access數據庫技術,分別建立系統疵病庫和用戶自定義疵病庫。疵病庫包含疵病編號、名稱、特征碼與疵病信息等字段,其中系統疵病庫選取《GJB2977A—2006火炮靜態檢測方法》[4]中具有代表性的42種疵病。
3.2疵病自動比對模塊
疵病自動比對模塊主要是通過對抓拍的疵病圖片進行幾何變換、灰度處理、計算灰度平均值,獲取當前圖片的特征碼,并自動與疵病庫中的疵病特征碼進行比對,確定疵病類型。
首先,對拍攝的原始圖像進行幾何校正,消除因攝取位置不同而造成的身管特征區域原始圖像的非線性誤差,然后經過均衡化和邊緣銳化處理,得到最后供屏幕比對使用的圖像[5-6],圖6為疵病探測儀拍攝的身管內表面陽線劃痕和陰線脫鉻疵病的圖像。其次,對預處理后的圖像進行二值化,系統采用一種基于局部區域平均灰度的二值化算法,考慮遍歷待處理圖像的矩形區域,如果當前像素p的灰度大于該矩形區域的平均灰度,則p被二值化為1,否則p為0. 得到正確的二值化圖像之后,經形態學處理去除噪聲點,得到圖像信息,經Hash算法變換,符合條件的在特征碼序列中加入1,否則加入0,得到256位特征碼。
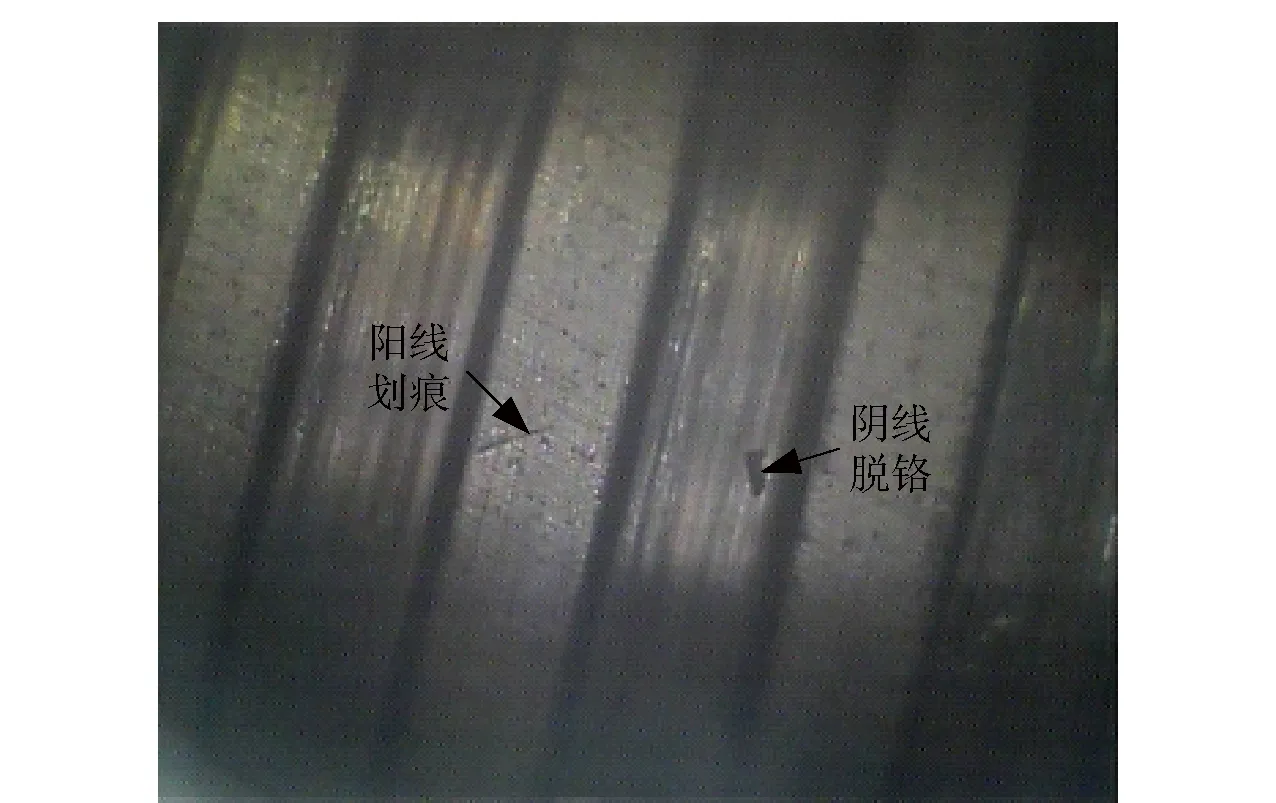
圖6 身管內表面疵病Fig.6 Flaws of inner surface of barrel
圖6中劃痕的特征碼為0000000000000000000 00000000000000000000000000000000000000000000 00000000000000000000000000000000011100000000 00000111111111100010011111111111111011111111 11111111101111111111111110111111111111111111 11001111100011110001111111000111101111111110 01111111111111111,將該特征碼與疵病庫中劃痕特征碼按位依次進行比對,如果相同則計數器累加1,最后累加數除以256即為該疵病的相似度。圖6中劃痕與疵病庫中劃痕的相似度為36.3%,小于系統默認的60%,系統判定兩幅圖片不相似;如果相似度超過60%,則系統提示兩幅圖片為相似圖片,并彈出疵病庫中的相似疵病類型和信息的提示框,供檢測人員使用。
3.3疵病測量模塊
測量模塊主要完成比例尺的確定、疵病長度和面積的測量。對于口徑一定的身管而言,其陽線和陰線的寬度是已知的,因此,設計時采用比較測量法,在起始界面中,選擇不同口徑的高炮,系統自動調用與口徑相應的陰線寬度值,通過鼠標獲取陰線(圖7所示)左邊緣點坐標P1(x1,y1)和與之垂直的右邊緣點坐標P2(x2,y2),計算兩點之間長度及其所占的總像素數,就可計算并存儲每個像元的長度當量,完成比例尺的換算。
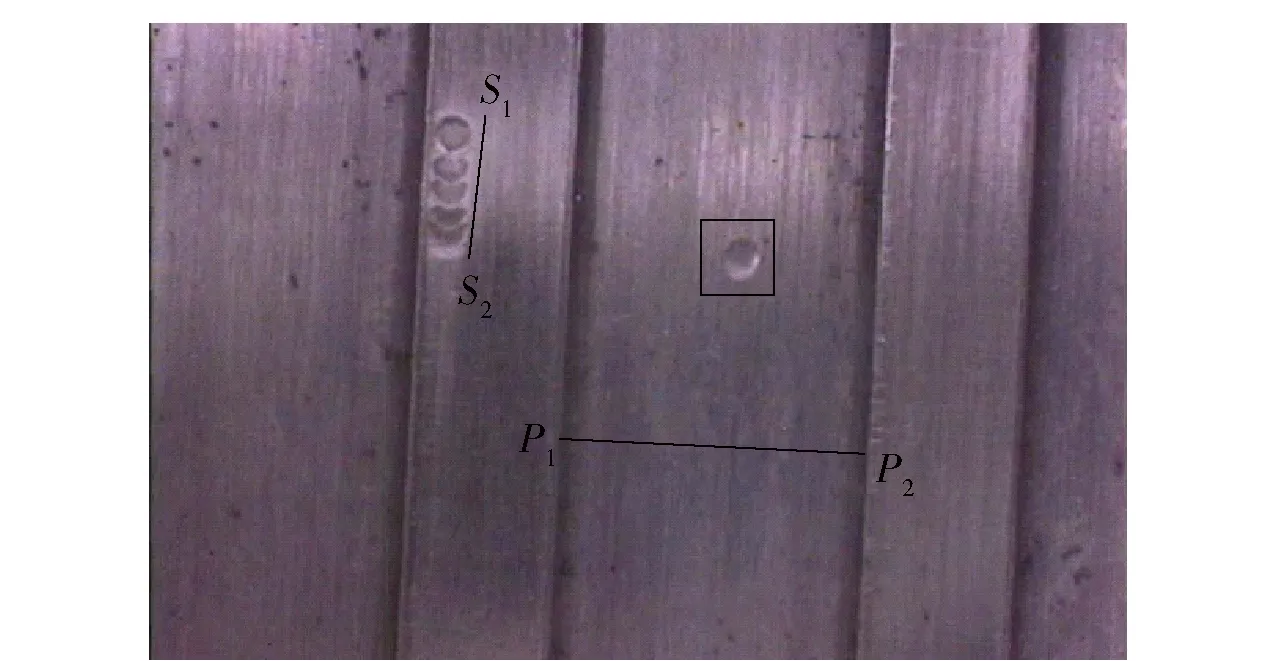
圖7 疵病測量Fig.7 Flaws detection
圖7中有兩處脫鉻疵病,測量線性疵病長度時,按下鼠標左鍵,獲取疵病起始點坐標S1(x3,y3),沿疵病位置從左至右拖動鼠標至疵病結束點后松開鼠標左鍵,獲取終點坐標S2(x4,y4);測量疵病面積時,用同樣方法沿矩形框對角線拖動鼠標,獲取S1和S2坐標后,系統分別自動計算和顯示疵病的長度、面積。
應用該系統對直徑為10 mm圓形和長度為10 mm方形模擬疵病貼片進行疵病尺寸測量實驗,實驗結果如表1所示。
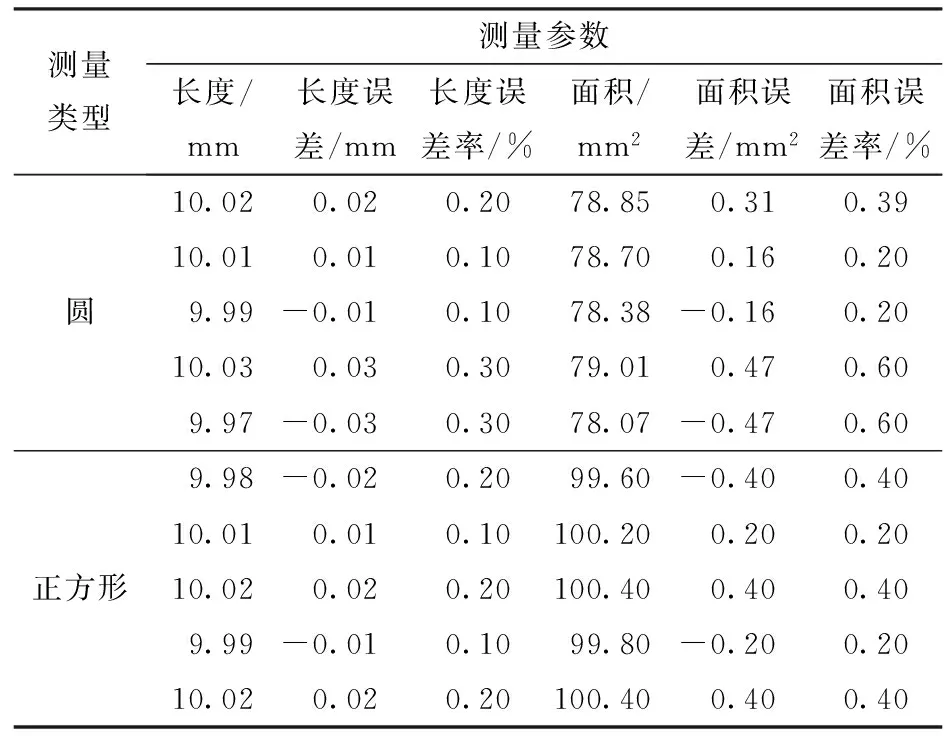
表1 疵病尺寸測量試驗結果
實驗結果表明,該疵病測量系統測量誤差率小于1%,能夠滿足身管疵病的長度和面積測量精度的需要。
3.4測試報告生成模塊
3.4.1分項報告
分項報告主要是將某一個疵病的大小、位置和影像等信息插入到Word文檔中,自動比對或人工判斷疵病類型、添加疵病特征描述,自動形成疵病檢查結論并提供使用建議選項,供顯示或打印。其中,使用建議由人工選擇或輸入。根據兵器操作教程中的有關規定,軟件提供的維護保養建議選項主要有:1)炮膛內油污過多,需要汽油(煤油)或肥皂水清洗炮膛;2)炮膛內表面有火藥殘渣,需要繼續擦拭;3)內膛表面銹蝕,需要木炭粉混合劑除銹;4)內膛表面有掛銅,需用除銅劑清洗炮膛;5)內膛表面有鍍鉻層剝落,加強維護和檢查;6)導氣塞有燒蝕或火藥殘渣,需拆卸并清洗;7)導氣孔燒蝕嚴重,建議申請報廢;8)陽線斷裂長度超出范圍,建議申請報廢;9)內膛表面有明顯裂紋,建議申請報廢。
3.4.2綜合檢測報告
根據《GJB 5900—2006高炮身管壽命評定準則》[7]等資料要求,重點考慮單個和累計疵病面積、斑點直徑和總數、裂紋長度、膛線斷裂或剝落長度、導氣孔直徑等身管疵病特征值,利用軟件對身管等級進行量化處理,實現身管質量的自動評定。
4 結論
本數字測量儀綜合采用光機電等技術,實現窺膛組件在膛內的自動移動、定位和疵病大小的自動測量,能夠定性、定量分析身管疵病的類型與特征;系統能夠自動評定身管質量等級、提出維護保養建議,滿足部隊基層級維護保養的實際需要;該數字測量儀架設方便,智能化程度高,適合基層分隊使用,具有較高的推廣應用價值。
References)
[1]鄭軍,徐春光,肖定國,等.火炮身管內表面的綜合測量系統研究[J].北京理工大學學報,2003,23(6):694-698.
ZHENG Jun, XU Chun-guang, XIAO Ding-guo, et al. A comprehensive measuring system for the inner surface of artillery[J].Transactions of Beijing Institute of Technology,2003,23(6):694-698. (in Chinese)
[2]陳永才,宋遒志,王建中.國內外火炮身管延壽技術研究進展[J].兵工學報,2006,27(2):331-334.
CHEN Yong-cai, SONG Qiu-zhi, WANG Jian-zhong.New technologies to extend the erosion life of gun barrel[J].Acta Armamemarii, 2006,27(2):331-334. (in Chinese)
[3]李莉,邱旭,馬宏.炮管內膛型廓自動光電檢測系統[J].儀器儀表學報, 2006,26(6):1544-1546.
LI Li, DI Xu, MA Hong. Research on the photoelectrical measuring system for detecting bore contour of the cannon barrel[J]. Chinese Journal of Scientific Instrument, 2006,26(6):1544-1546. (in Chinese)
[4]GJB 2977A—2006火炮靜態檢測方法[S].北京:中國人民解放軍總裝備部,2007:53-79.
GJB 2977A—2006Inspecting and measuring methods for static gun[S].Beijing: the PLA General Armanent Department,2007:53-79. (in Chinese)
[5]白慶本,韓兆福.基于CCD成像和計算機圖像處理技術的火炮內膛自動檢測[J].計算機測量與控制,2002,10(2):124-126.
BAI Qing-ben, HAN Zhao-fu. Automatic detection of cannon’s chamber based on CCD imaging and computer image processing technique [J].Computer Measurement & Control,2002,10(2):124-126. (in Chinese)
[6]阮秋琪.數字圖像處理學[M].北京:電子工業出版社,2001:204-208.
RUN Qiu-qi, Digital image processing method[M].Beijing: Publishing House of Electronics Industry, 2001:204-208. (in Chinese)
[7]GJB 5900—2006高炮身管壽命評定準則[S].北京:國防科學技術工業委員會發布,2006:2-3.
GJB 5900—2006 Assessment criterion for barrel life of anti-aircraft gun[S].Beijing: Commission of Science,Technology and Industry for National Defense,2006:2-3. (in Chinese)
Research on Digital Detector for Detecting the Flaws of Anti-aircraft Artillery Barrel
ZHANG Zhen-you1, YANG Qi-zi2, YU Zheng-qing3, ZHANG Tian-wen4
(1.Department of Missile-Gun Integrated, Air Defense Forces Academy, Zhengzhou 450052, Henan, China; 2.Department of Artillery, Air Defense Forces Academy, Zhengzhou 450052, Henan, China; 3.Department of Basic Courses, Air Defense Forces Academy, Zhengzhou 450052, Henan, China; 4.Department of Scientific Research, Air Defense Forces Academy, Zhengzhou 450052,Henan,China)
The flaws of barrel of anti-aircraft artillery may influence the accuracy of launching and safety of use during launching. A device of detecting the flaws of artillery barrel is designed using optical-electron-mechanical control technology and CCD imaging technology based on the structure of bore. This device is used to investigate the surface appearance of inner bore through 360 ° panoramic imaging, thereby examining the surface of inner bore qualitatively and quantitatively. It has the functions to position the flaws, compare the types of flaws and measure the sizes of flaws on barrel automatically. The system can be driven to move along the barrel axis, thereby effectively identifying the flaws on bore and making a comprehensive assessment.
ordnance science and technology; flaw; detecting; anti-aircraft artillery barrel; CCD
2014-06-04
張振友(1965—),男,教授,碩士生導師。E-mail:yqz196210@163.com
TJ35
A
1000-1093(2015)04-0590-05
10.3969/j.issn.1000-1093.2015.04.003
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00