考慮自動駕駛儀特性的自適應(yīng)模糊動態(tài)面滑模制導律設(shè)計
2015-11-11 01:32:52商巍唐勝景郭杰馬悅悅張堯
兵工學報 2015年4期
關(guān)鍵詞:結(jié)構(gòu)
商巍, 唐勝景, 郭杰, 馬悅悅, 張堯
(北京理工大學 飛行器動力學與控制教育部重點實驗室, 北京 100081)
?
考慮自動駕駛儀特性的自適應(yīng)模糊動態(tài)面滑模制導律設(shè)計
商巍, 唐勝景, 郭杰, 馬悅悅, 張堯
(北京理工大學 飛行器動力學與控制教育部重點實驗室, 北京 100081)
針對導彈攔截高機動性目標的問題,基于自適應(yīng)模糊逼近策略和動態(tài)面滑模控制思想,提出了一種新型的攔截制導律。建立了考慮自動駕駛儀動態(tài)延遲特性的彈目相對運動方程,以零化視線角速率為出發(fā)點,設(shè)計了基于自適應(yīng)趨近率的動態(tài)面滑模制導律,同時設(shè)計了綜合視線角速率以及彈目距離的自適應(yīng)模糊方法,對變結(jié)構(gòu)項進行逼近。仿真結(jié)果表明,針對高機動性目標,該制導方法能夠有效地去除抖振,并且具有良好的制導精度。
控制科學與技術(shù); 制導律; 自適應(yīng)模糊逼近; 動態(tài)面滑模控制; 自動駕駛儀特性
0 引言
隨著導彈突防技術(shù)的快速發(fā)展,其機動性越來越大,針對高機動性導彈的攔截面臨著巨大的挑戰(zhàn)。現(xiàn)有的末制導律很難滿足針對高機動性目標的有效攔截,尋求高精度、高魯棒性的制導律是提高導彈制導性能的關(guān)鍵因素。
工程中常用的制導律是比例導引,然而比例導引律命中點的法向過載與此時目標的運動狀態(tài)直接相系[1]。在攻擊高機動性目標時,導彈接近目標時的視線角速率會發(fā)散。滑模控制對系統(tǒng)的攝動和外部擾動具有很強的魯棒性,因此可采用滑模思想設(shè)計制導律攔截高機動目標。文獻[2]采用滑模制導律,目標機動項被認為是有界不確定的,只需知道目標運動的有界值。文獻[3]提出了一種基于2階滑模控制技術(shù)的制導律。文獻[4]應(yīng)用滑模控制方法,滑模面選為零效脫靶量,設(shè)計了集駕駛儀和制導于一體的滑模控制器,通過估計剩余時間,提高了攔截機動目標的精度。文獻[5-8]采用一種滑模導引律,設(shè)計了一種自適應(yīng)趨近率,對系統(tǒng)干擾以及參數(shù)攝動具有一定的魯棒性,但切換系數(shù)的選擇很大程度上依賴于目標的運動情況。
然而滑模制導律存在著抖振的問題,嚴重影響了其在工程中的應(yīng)用。針對滑模控制的抖振問題,更多地采用飽和函數(shù)法去除抖振影響[9-12],但由于目標機動的不確定性,切換增益的取值難于確定,取值不當會導致系統(tǒng)性能差。
文獻[13]采用模糊控制技術(shù),通過估計目標的加速度選取開關(guān)項的大小,從而達到減弱抖振的目的,由于不同目標的機動性不同,因此很難獲得目標加速度的估計值。文獻[14]采用自適應(yīng)模糊系統(tǒng)對不確定函數(shù)進行逼近,獲得變增益的能力,有效地提高了制導精度和魯棒性,然而由于變結(jié)構(gòu)項的存在,視線角速度在制導末段依舊產(chǎn)生了抖振現(xiàn)象。
針對上述問題,采用自適應(yīng)模糊方法逼近變結(jié)構(gòu)項,能夠有效地去除抖振的現(xiàn)象。模糊系統(tǒng)輸入綜合視線角速率和彈目距離信息,降低末制導初始時刻的過載,同時使系統(tǒng)能夠快速地趨近于滑模面,使視線角速率始終在零附近,增強抗干擾能力,并且克服了變結(jié)構(gòu)項系數(shù)難以確定的問題。此外,針對考慮自動駕駛儀動態(tài)延遲性能的彈目運動方程,采用自適應(yīng)趨近率的動態(tài)面滑模方法設(shè)計制導律,在保證制導精度的同時,可消除微分項的膨脹,使制導律中參數(shù)的獲取簡單,具有工程應(yīng)用的價值。與傳統(tǒng)比例導引和采用飽和函數(shù)法的滑模制導律進行對比仿真,結(jié)果表明,針對不同情況的高機動性目標,本文所設(shè)計的方法能夠滿足制導精度和魯棒性的要求。
1 末端制導模型描述
為了簡化問題,僅考慮縱向平面內(nèi)的導彈制導問題,彈目相對運動關(guān)系如圖1所示。

圖1 彈目相對運動關(guān)系Fig.1 Motion relation between missile and air target
圖1中:r為導彈與目標的距離,vM為導彈的速度,aM為導彈的垂直速度方向的加速度,θM為導彈彈道傾角;q為目標視線角,vT為目標速度,aT為目標垂直速度方向的加速度,θT為目標航跡角。
根據(jù)圖1,得到彈目相對運動關(guān)系方程組:

(1)

(2)
σM=q-θM,
(3)
σT=q-θT,
(4)
(5)
(6)
在實際制導過程中,導彈的自動駕駛儀都存在動態(tài)延遲特性,把導彈自動駕駛儀當作理想環(huán)節(jié)所設(shè)計的導引性能難以保證,故研究基于自動駕駛儀動態(tài)特性的導引律更具工程意義。根據(jù)文獻[15],導彈的自動駕駛儀動態(tài)特性可近似為一階慣性環(huán)節(jié),其表達形式為
(7)


(8)
2 自適應(yīng)動態(tài)面滑模導引律設(shè)計
s1=x2.
(9)
其初始值s1(0)=x2(0),對s1進行求導可得

(10)
根據(jù)系統(tǒng)(8)式,選取自適應(yīng)滑模趨近率為
(11)
式中:k1和ε均為大于0的常數(shù)。
由(10)式、(11)式可得控制量

(12)

(13)


(14)
式中:T2為濾波器的時間常數(shù)。可得
(15)
選取第2個切換函數(shù)為s2=x3-x3c,選擇合適的控制量u使得s2在有限的時間內(nèi)趨向于0.
對s2進行求導,得

(16)
取控制量u為

(17)
式中:k2為大于0的數(shù)。
假設(shè)1系統(tǒng)(8)式中所有的狀態(tài)量和控制量都是有界可測。
假設(shè)2在末制導過程中,導彈的速度大小不變。
定理1對于系統(tǒng)(8)式,采用導引律(13)式和(17)式,若選取變結(jié)構(gòu)項系數(shù)ε≥L,其中L為正常數(shù),則系統(tǒng)中視線角速率能夠在有限的時間內(nèi)收斂到0.
證:選取Lyapunov函數(shù)

(18)
對V1進行求導

則
(19)

由(19)式可知,ε的取值與D有關(guān),但是由于目標的機動不確定,D很難估計,導致ε的取值很難確定,若ε的取值過小,無法滿足系統(tǒng)的穩(wěn)定條件而導致系統(tǒng)發(fā)散;若ε的取值過大,由于變結(jié)構(gòu)項的存在則會導致系統(tǒng)產(chǎn)生嚴重抖振。由于模糊系統(tǒng)具有逼近特征,因此采用自適應(yīng)模糊逼近方法對切換項進行逼近,用連續(xù)的函數(shù)代替切換項,不需要再對變結(jié)構(gòu)項系數(shù)進行取值,避免其取值不當對制導系統(tǒng)造成的不良影響,保證系統(tǒng)能夠收斂的同時,達到消除抖振的目的。
3 自適應(yīng)模糊逼近變結(jié)構(gòu)制導律設(shè)計
采用乘積推理機,單值模糊器和中心平均解模糊器[17],得

(20)

(21)
自適應(yīng)律(21)式中,η的初值一般取為0,為了保證自適應(yīng)模糊系統(tǒng)的逼近精度,ξ為自適應(yīng)參數(shù)。
則制導律的控制量變?yōu)?/p>

(22)

(23)
定理2對于系統(tǒng)(8)式,采用自適應(yīng)模糊系統(tǒng)對導引律進行設(shè)計,所設(shè)計的自適應(yīng)模糊動態(tài)面滑模制導律(22)式、(23)式,使用自適應(yīng)律(21)式調(diào)節(jié)η,則系統(tǒng)能夠保證視線角速率在有限時間內(nèi)收斂到0.

(24)
其中最優(yōu)參數(shù)

(25)
建立如下Lyapunov函數(shù):

(26)

由Lyapunov穩(wěn)定性可知,(22)式、(23)式給出的自適應(yīng)模糊動態(tài)面滑模制導律能夠滿足在制導末段視線角速率趨于0. 證畢。
設(shè)計的制導律中所需要的變量有視線角、視線角速率、彈目相對距離以及彈目相對距離變化率,這些變量均可以通過測量或估計獲得。
對于制導律的控制量(23)式、(24)式而言,為了保證Lyapunov穩(wěn)定性,要求k1和k2大于0,T1為1階延遲環(huán)節(jié)的時間常數(shù),T2為1階動態(tài)濾波器的時間常數(shù)。
4 示例仿真
導彈在參考坐標系的初始位置為xM0=0,yM0=0,初始彈道傾角為0°,速度為vM=380 m/s. 本文所采用的自適應(yīng)模糊動態(tài)面模糊制導律(AF-SMG),系統(tǒng)參數(shù)取值k1=2,k2=4,η的初始值均為0,ξ=100. 自動駕駛儀1階慣性環(huán)節(jié)時間常數(shù)為20 ms,1階動態(tài)濾波器T2=0.01 s.
4.1自動駕駛儀延遲特性對制導特性的影響
目標的初始位置為xT0=4 000 m,yT0=300 m,其初始速度為100 m/s. 目標運動為θT=50cost/vT的余弦機動,初始傾角θT0為0°. 基于AF-SMG分析自動駕駛儀延遲特性對制導特性的影響,選取1階慣性環(huán)節(jié)時間常數(shù)T11=0.1 s,T12=0.5 s,其對應(yīng)制導律記為AF-SMG-0.1和AF-SMG-0.5. 為與AF-SMG-0.5對比,將不考慮自動駕駛儀延遲特性的制導律記為NAD,并進行仿真。仿真結(jié)果如表1和圖2~圖5所示。
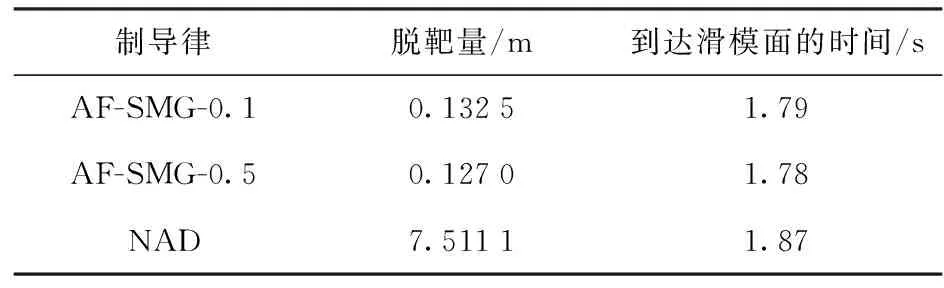
表1 AF-SMC-0.1、AF-SMC-0.5和NAD仿真結(jié)果
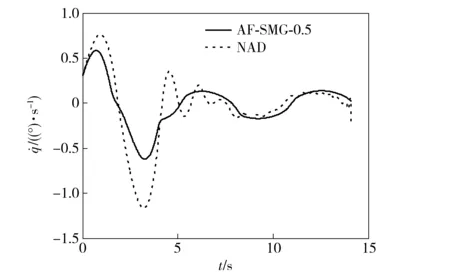
圖2 AF-SMG-0.5和NAD視線角速率變化Fig.2 Variations of LOS angular velocity under AF-SMG-0.5 and NAD
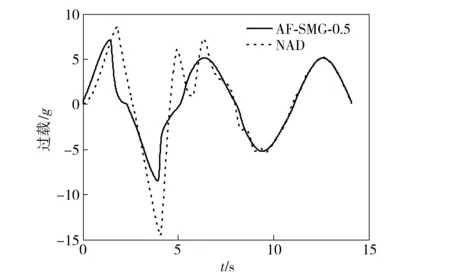
圖3 AF-SMG-0.5和NAD過載變化Fig.3 Variations of overload command under AF-SMG-0.5 and NAD
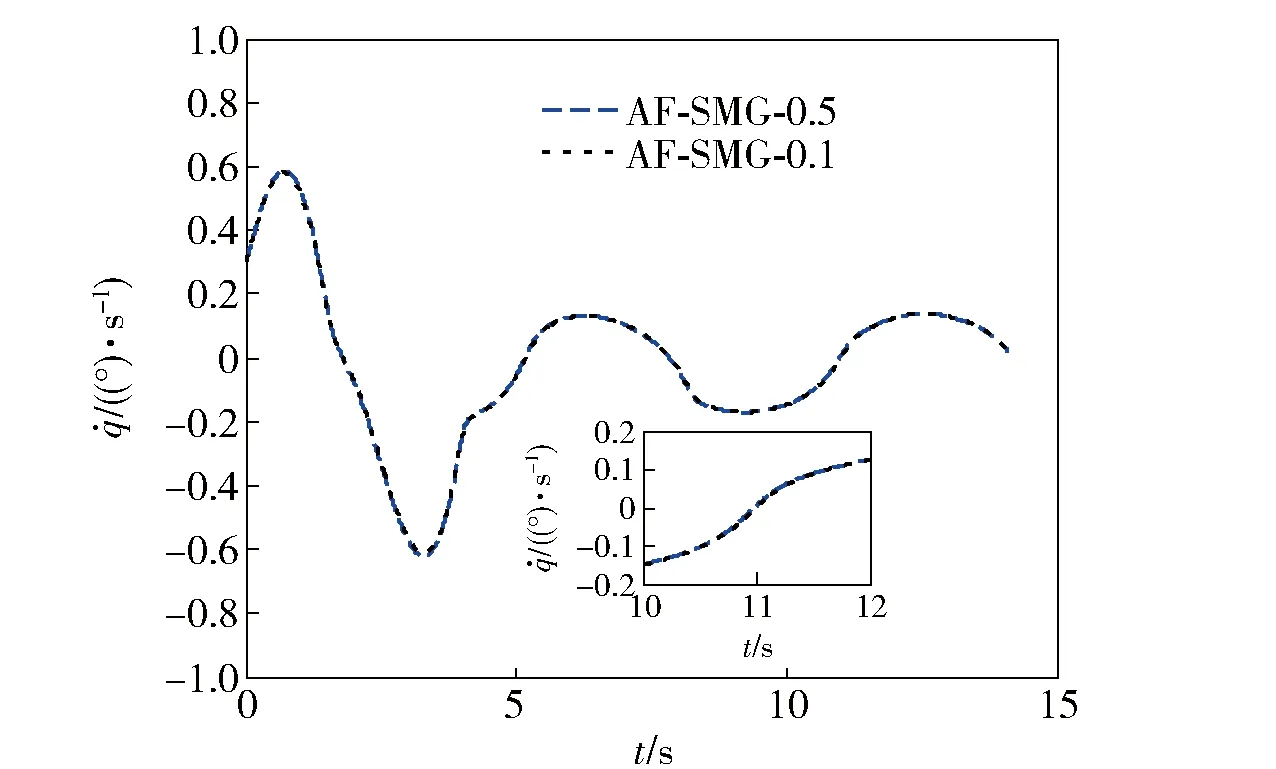
圖4 AF-SMG-0.1和AF-SMG-0.5視線角速率變化Fig.4 Variations of LOS angular velocity under AF-SMG-0.1 and AF-SMG-0.5
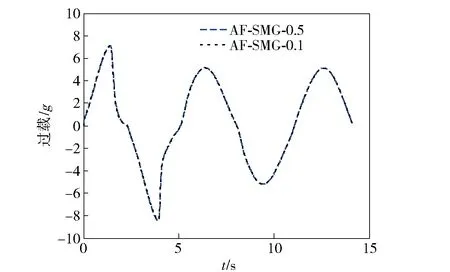
圖5 AF-SMG-0.1和AF-SMG-0.5過載變化Fig.5 Variations of overload command under AF-SMG-0.1 and AF-SMG-0.5
從表1和圖2、圖3可以看出,由于NAD沒有考慮1階慣性環(huán)節(jié)的延遲特性,因此相對于AF-SMG-0.5,其過載在10 s之前具有滯后效應(yīng),從而導致視線角速率無法很快收斂并穩(wěn)定在滑模面的附近。在末制導末段,攔截器接近目標時,慣性環(huán)節(jié)的延遲特性導致制導系統(tǒng)視線角速率發(fā)散,并造成較大的脫靶量。由表1和圖4、圖5可以看出,AF-SMG-0.1和AF-SMG-0.5的過載指令以及視線角速率基本重合,1階慣性環(huán)節(jié)時間常數(shù)的變化對AF-SMG的制導性能影響不大。
4.2目標做余弦機動
目標初始狀態(tài)以及目標的機動情況與4.1節(jié)相同,針對此種余弦機動目標進行仿真,仿真結(jié)果如表2和圖6~圖9所示。
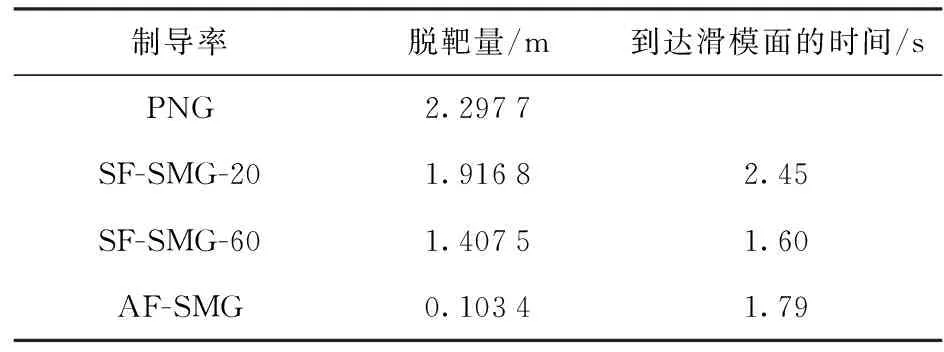
表2 AF-SMC、SF-SMC和PNG仿真結(jié)果
圖6 視線角速率變化Fig.6 Variations of LOS angular velocity
圖7 過載變化Fig.7 Variations of overload command
圖8 自適應(yīng)模糊系統(tǒng)輸出Fig.8 Output of adaptive fuzzy system
圖9 導彈和目標運動軌跡Fig.9 Motion tracks of missile and target
從表2和圖6可以看出:AF-SMG和SF-SMG-60在末制導初始階段視線角速率能夠快速地收斂到0;在末制導末段,由于SF-SMG-60中變結(jié)構(gòu)項系數(shù)過大,導致系統(tǒng)產(chǎn)生抖振,而AF-SMG采用自適應(yīng)模糊逼近的方法替代符號函數(shù),可有效地去除抖振,改進了制導性能,提高了制導精度。由圖7可知:AF-SMG初始時刻過載很小,隨后過載逐漸增大,確保視線角速率能夠快速地收斂到0;在制導末段,SF-SMG-60具有明顯的抖振,AF-SMG去除接近目標時的抖振,這是由于AF-SMG綜合視線角速率和彈目距離的信息進行控制,通過自適應(yīng)模糊逼近方法,將產(chǎn)生抖振的符號函數(shù)改變?yōu)檫B續(xù)函數(shù),在保證制導性能的前提下,有效去除了系統(tǒng)的抖振。自適應(yīng)模糊系統(tǒng)的輸出曲線如圖8所示。由圖6和圖7可以得到,由于SF-SMG-20中變結(jié)構(gòu)項的取值過小,無法保證系統(tǒng)的穩(wěn)定性,PNG難以克服目標機動的影響,因此SF-SMG-20和PNG造成視線角速率在末制導開始就發(fā)散,脫靶量較大。圖9為縱向平面內(nèi)導彈和目標的運動軌跡。
4.3目標做不規(guī)則機動
目標初始位置及速度與4.1節(jié)相同,目標的法向加速度如圖10所示。針對此種不規(guī)則機動目標進行仿真,仿真結(jié)果如表3和圖11~圖14所示。
圖10 目標法向過載Fig.10 Normal overload of target
制導律脫靶量/m到達滑模面的時間/sPNG3.0913SF-SMG-202.11642.97SF-SMG-601.89802.10AF-SMG0.34042.14
圖11 視線角速率變化Fig.11 Variations of LOS angular velocity
圖12 過載變化Fig.12 Variations of overload command
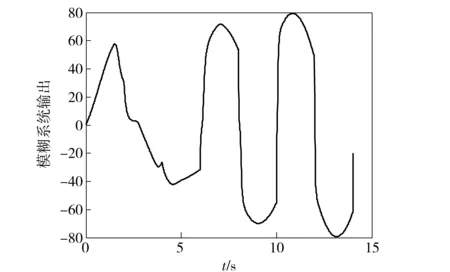
圖13 自適應(yīng)模糊系統(tǒng)輸出Fig.13 Output of adaptive fuzzy system
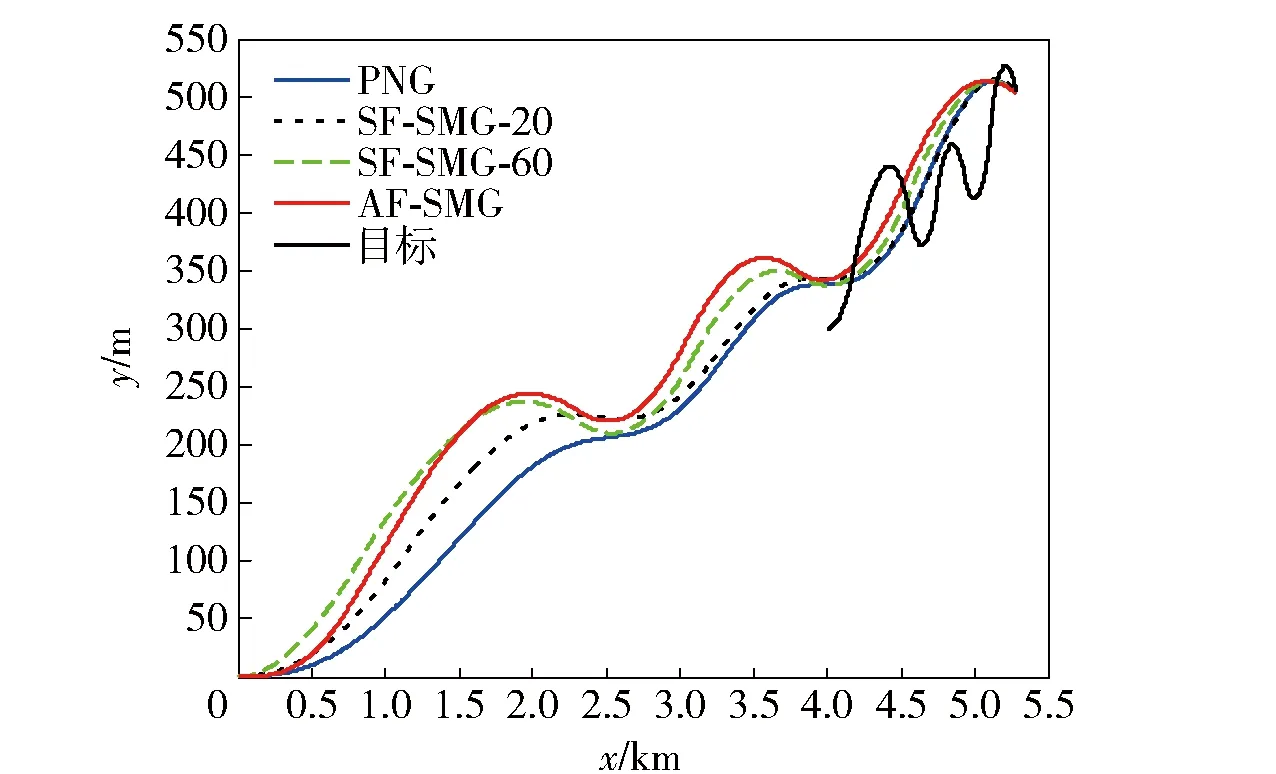
圖14 導彈和目標運動軌跡Fig.14 Motion tracks of missile and target
從表3和圖11中可以看出,由于SF-SMG-60變結(jié)構(gòu)項系數(shù)的取值能夠在6 s之前保證系統(tǒng)的穩(wěn)定性,因此視線角速率能夠快速收斂并穩(wěn)定于0附近,而在6 s之后,由于目標的法向加速度增大,SF-SMG-60變結(jié)構(gòu)項系數(shù)的取值無法保證系統(tǒng)的穩(wěn)定性,造成視線角速率發(fā)散并且需要較大的過載。圖12為過載變化示意圖,如圖12所示,SF-SMG-20變結(jié)構(gòu)項系數(shù)的取值一直無法保證系統(tǒng)的穩(wěn)定性,同PNG相似,在末制導初始階段,視線角速率就發(fā)散,在制導末段的過載較大,并造成較大的脫靶量。而AF-SMG采用自適應(yīng)模糊系統(tǒng)代替變結(jié)構(gòu)項,自適應(yīng)模糊系統(tǒng)輸出如圖13所示,保證了系統(tǒng)的穩(wěn)定性,因此在整個制導過程中,視線角速率穩(wěn)定在滑模面附近,并具有較小的脫靶量以及良好的制導性能。圖14為縱向平面內(nèi)導彈和目標的運動軌跡。
最后,對比針對不同機動能力目標的仿真結(jié)果可知,SF-SMG的制導性能易受到變結(jié)構(gòu)項系數(shù)取值以及目標機動能力的影響,變結(jié)構(gòu)項系數(shù)的取值不當會造成制導系統(tǒng)的不穩(wěn)定,而由于AF-SMG采用自適應(yīng)模糊系統(tǒng)代替變結(jié)構(gòu)項,在目標信息完全未知的情況下,依舊能夠保證制導精度與制導性能。
5 結(jié)論
針對高機動性目標設(shè)計的動態(tài)面滑模制導律,本文采用了自適應(yīng)模糊逼近的方法對變結(jié)構(gòu)項進行逼近,克服目標機動不確定性導致變結(jié)構(gòu)系數(shù)難以確定的問題,同時去除變結(jié)構(gòu)系數(shù)取值不當造成系統(tǒng)的抖振,改善了制導性能。相比于飽和函數(shù)法,基于自適應(yīng)模糊逼近的方法能夠有效地去除滑模制導律的抖振問題,提高了末制導精度和系統(tǒng)的魯棒性。自適應(yīng)模糊系統(tǒng)綜合視線角速率和彈目距離信息,降低末制導初始時刻的過載,確保視線角速率快速趨近于0,并使視線角速率始終在0附近,優(yōu)化了系統(tǒng)動態(tài)品質(zhì),提高了制導性能。此外,在導引律設(shè)計過程中,采用動態(tài)滑模的方法補償了自動駕駛儀延遲的影響,制導律參數(shù)獲取簡單,便于在工程中的應(yīng)用。
References)
[1]錢杏芳,林瑞雄,趙亞男. 導彈飛行力學[M].北京:北京理工大學出版社,2006.
QIAN Xing-fang,LIN Rui-xiong,ZHAO Ya-nan.Flight dynamics of missiles [M].Beijing:Beijing Institute of Technology Press,2006.(in Chinese)
[2]Jongki M, Kiseok K, Youdan K. Design of missile guidance law via variable structure control [J].Journal of Guidance,Control,and Dynamics,2001,24(4):659-664.
[3]Shtessel Y B, Shkolnikov I A, Levant A. Smooth second-order sliding modes: missile guidance application [J].Automatica,2007,43(8):1470-1476.
[4]Shima T, Idan M, Golan O M. Sliding-mode control for integrated missile autopilot guidance[J]. Journal of Guidance, Control, and Dynamics, 2006, 29(2): 250-260.
[5]Zhou D, Mu C, Xu. Adaptive sliding-mode guidance of a homing missile[J]. Journal of Guidance, Control, and Dynamics, 1999, 22(4): 589-594.
[6]Zhou D, Qu P, Sun S A. Guidance law with terminal impact angle constraint accounting for missile autopilot[J]. Journal of Dynamic Systems, Measurement, and Control, 2013, 135(5): 051009.
[7]佘文學, 周軍, 周鳳岐. 一種考慮自動駕駛儀動態(tài)特性的自適應(yīng)變結(jié)構(gòu)制導律[J]. 宇航學報, 2003, 24(3): 245-249.
SHE Wen-xue, ZHOU Jun, ZHOU Feng-qi. An adaptive variable structure guidance law considering missile’s dynamics of autopilot [J]. Journal of Astronautics, 2003, 24(3): 245-249.(in Chinese)
[8]孫勝, 張華明, 周荻. 考慮自動駕駛儀動特性的終端角度約束滑模導引律[J]. 宇航學報, 2013, 34(1): 69-78.SUN Sheng,ZHANG Hua-ming,ZHOU Di.Sliding mode guidance law with autopilot lag for terminal angle constrained trajectories [J]. Journal of Astronautics, 2013, 34(1): 69-78.(in Chinese)
[9]賈慶忠, 劉永善, 劉藻珍. 電視制導侵徹炸彈落角約束變結(jié)構(gòu)反演制導律設(shè)計[J]. 宇航學報, 2008, 29(1): 208-214.
JIA Qing-zhong,LIU Yong-shan,LIU Zao-zhen.Variable-structure backstepping guidance law with terminal angular constraint for video-guided penetrating bomb[J]. Journal of Astronautics, 2008, 29(1): 208-214.(in Chinese)
[10]王曉芳, 鄭藝裕, 林海. 基于擾動觀測器的終端角約束滑模導引律[J]. 系統(tǒng)工程與電子技術(shù), 2014, 36(1): 111-116.
WANG Xiao-fang,ZHENG Yi-yu,LIN Hai.A sliding mode guidance law with impact angle constraint based on disturbance observer[J]. Systems Engineering and Electronics, 2014, 36(1): 111-116.(in Chinese)
[11]熊俊輝, 唐勝景, 郭杰,等. 基于模糊變系數(shù)策略的迎擊攔截變結(jié)構(gòu)制導律設(shè)計[J]. 兵工學報, 2014, 35(1): 134-139.
XIONG Jun-hui,TANG Sheng-jing,GUO Jie,et al.Design of variable structure guidance law for head-on interception based on variable coefficient strategy[J]. Acta Armamentarii, 2014, 35(1): 134-139.(in Chinese)
[12]高峰, 唐勝景, 師嬌, 等. 一種改進的自適應(yīng)滑模變結(jié)構(gòu)導引律[J]. 彈道學報, 2013, 25(3): 18-23.
GAO Feng,TANG Sheng-jing,SHI Jiao, et al.An improved adaptive sliding-mode navigation guidance law with variable structure[J]. Journal of Ballistics, 2013,25(3): 18-23.(in Chinese)
[13]劉永善, 劉藻珍, 李蘭忖. 攻擊機動目標的被動尋的模糊變結(jié)構(gòu)制導律研究[J]. 系統(tǒng)工程與電子技術(shù), 2007, 29(2): 254-258.
LIU Yong-shan,LIU Zao-zhen,LI Lan-cun.Research on fuzzy variable structure guidance law for passive homing missiles against maneuvering targets [J]. Systems Engineering and Electronics, 2007, 29(2): 254-258.(in Chinese)
[14]陳宇, 董朝陽, 王青, 等. 直接側(cè)向力控制導彈的自適應(yīng)模糊變結(jié)構(gòu)末制導律設(shè)計[J]. 宇航學報, 2006, 27(5): 984-989.
CHEN Yu,DONG Chao-yang,WANG Qing, et al.A terminal guidance law design for side jet control missile based on adaptive fuzzy variable structure control [J]. Journal of Astronautics, 2006, 27(5): 984-989.(in Chinese)
[15]Zrachan P. Tactical and strategic missile guidance[M]. US: American Institute of Aeronautics and Astronautics, 1997.
[16]Swaroop D, Hedrick J K, Yip P P, et al. Dynamic surface control for a class of nonlinear systems[J]. IEEE Transactions on Automatic Control, 2000, 45(10): 1893-1899.
[17]Shaocheng T, Jiantao T, Tao W. Fuzzy adaptive control of multivariable nonlinear systemsl[J]. Fuzzy Sets and Systems, 2000, 111(2): 153-167.
Design of Adaptive Fuzzy Dynamic Surface Sliding-mode Guidance Law Considering Autopilot Lag
SHANG Wei, TANG Sheng-jing, GUO Jie, MA Yue-yue, ZHANG Yao
(Key Laboratory of Dynamics and Control of Flight Vehicle, Ministry of Education, Beijing Institute of Technology, Beijing 100081, China)
Based on adaptive fuzzy approach strategies and dynamic surface sliding mode control techniques, a novel interception guidance law is proposed for the problem that a missile attacks a high maneuvering target. Relative motion equations of missile and target are established accounting for autopilot lag. Based on the annihilating idea of the missile-target LOS(line-of-sight) angular velocity, a dynamic surface sliding mode guidance law is designed with adaptive reaching law. Meanwhile, the adaptive fuzzy method based on integrated the LOS angular velocity and missile-target distance is adopted to approach variable-structure term. The simulation results show that this law can remove chattering phenomenon. Moreover, this law has higher guidance precision to high maneuvering.
control science and technology; guidance law; adaptive fuzzy approach; dynamic sliding-mode control; autopilot lag
2014-04-30
國家自然科學基金項目(11202024)
商巍(1989—),男,博士研究生。E-mail:shw2012@bit.edu.cn;
唐勝景(1959—),男,教授,博士生導師。E-mail:tangsj@but.edu.cn
TG156
A
1000-1093(2015)04-0660-08
10.3969/j.issn.1000-1093.2015.04.013
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數(shù)理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50