面向固定翼無人機的視覺導引仿真系統設計與實現
2015-11-14 03:20:28莊麗葵曹云峰
云南民族大學學報(自然科學版) 2015年4期
李 強,莊麗葵,曹云峰,丁 萌
(南京航空航天大學自動化學院,南京210016)
基于視覺的自主著陸技術是近年來無人機導航、制導與控制(guidance navigation& control,GNC)領域的研究熱點[1-3],但在實際的研究過程中都將視覺導航、制導、控制三大系統分離出來單獨研究,主要原因是現有的視覺導航技術的魯棒性和實時性有待提高,其與制導、控制模塊的匹配能力有待加強,還無法實現在線閉環實驗.現有的GNC系統的仿真手段對于視覺導航研究存在嚴重的不足,如無法獲得實時更新的著陸場景圖像[4-5].因此開發能夠實現三大系統閉環仿真的實驗手段非常重要,且意義重大.
本課題來源于實際項目,要求演示一架大型固定翼無人機從距已知跑道較遠處開啟視覺導引器導引著陸.由于種種原因,很難使用實際的大型無人機進行實驗驗證,因此有必要構建一個能夠對視覺著陸算法進行驗證的仿真系統,利用這一仿真系統進行無人機著陸過程中航跡規劃、飛行控制、著陸控制、視覺導引等的研究開發與驗證演示.
基于上述目的,本文研究了一種基于 Flightgear[6]和Matlab的面向固定翼無人機的視覺導引仿真系統,該仿真平臺的基本配置是由3臺計算機組成的局域網,3臺計算機分別負責無人機的動力學模型與控制算法解算,基于FlightGear的著陸視景生成,視覺導引算法運行.3臺計算機協作完成包含視覺算法的無人機GNC閉環仿真系統.其中著陸實時畫面由Flightgear內的OpenGL模塊渲染生成,并通過HDMI視頻采集卡實時采集抓取,解決了著陸場景圖像生成及與視覺算法交互的問題.本系統的功能主要包括:
1)引入視覺信息的無人機飛行控制導引算法開發與驗證,如控制架構設計、控制律設計等;
2)引入視覺信息的無人機自主著陸導引算法開發與驗證,如航跡規劃技術、航跡最優技術、航跡跟蹤技術等;
3)引入視覺信息的無人機自主著陸任務管理策略開發與驗證,如多層次著陸任務規劃方法研究;
4)視覺導航算法開發與驗證.
1 仿真系統方案設計
1.1 仿真系統原理框圖
本仿真系統實現了Matlab和FlightGear聯動的平臺交互式仿真,并且能有效融合視覺導引系統的信息,最終完成基于視覺的自主著陸閉環仿真系統.為實現模塊化開發,系統分為3個子系統:自主著陸控制系統(簡稱控制機);可視化視景仿真演示系統(簡稱視景機);視覺導引系統(簡稱視覺機).
3個子系統分別獨立運行在3臺高性能計算機上,并通過網絡通訊實現控制閉環.為了仿真出真實攝像頭視角的圖像,視景機使用了Flightgear,Flightgear利用OpenGL渲染出逼真的影像數據,數據傳輸到HDMI接口后能被視覺機上安裝的HDMI視頻卡采集到.仿真系統的數據流為:①控制機負責實時著陸軌跡生成、航跡控制、飛行姿態控制和飛機動態模型的更新,輸出飛機實時位姿數據到視景機;②視景機的Flightgear依據位姿數據更新飛機的狀態,即刷新了虛擬攝像頭的畫面;③視覺機采集視覺信號進行分析解算,輸出當前飛機導航參數到控制機;④轉入①,形成閉環.

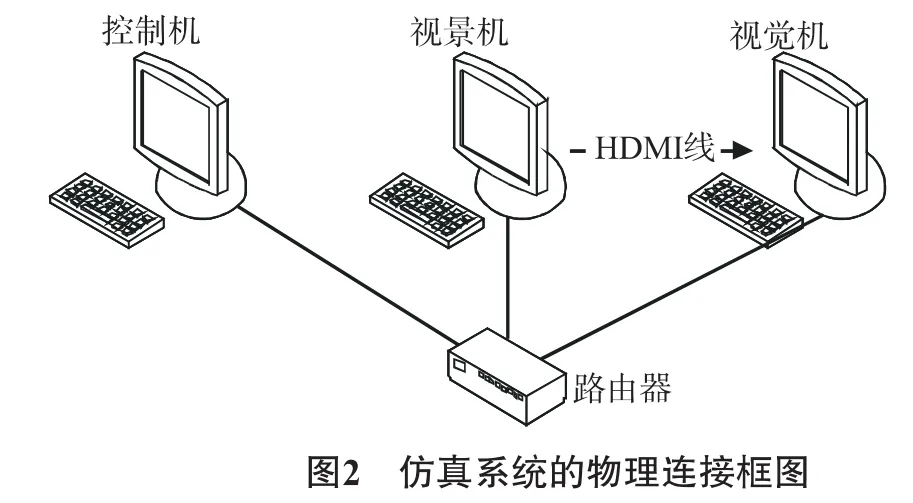
仿真系統各子系統通過局域網連接,邏輯上是環形連接形式,物理上使用星形網絡連接形式.3個子系統間所有信息可實現共享,比如視景機會把飛機位置的真值共享給視覺機,視覺機依據此真值驗證其視覺識別,解算出飛機位置的準確性和魯棒性等.
1.2 自主著陸控制系統
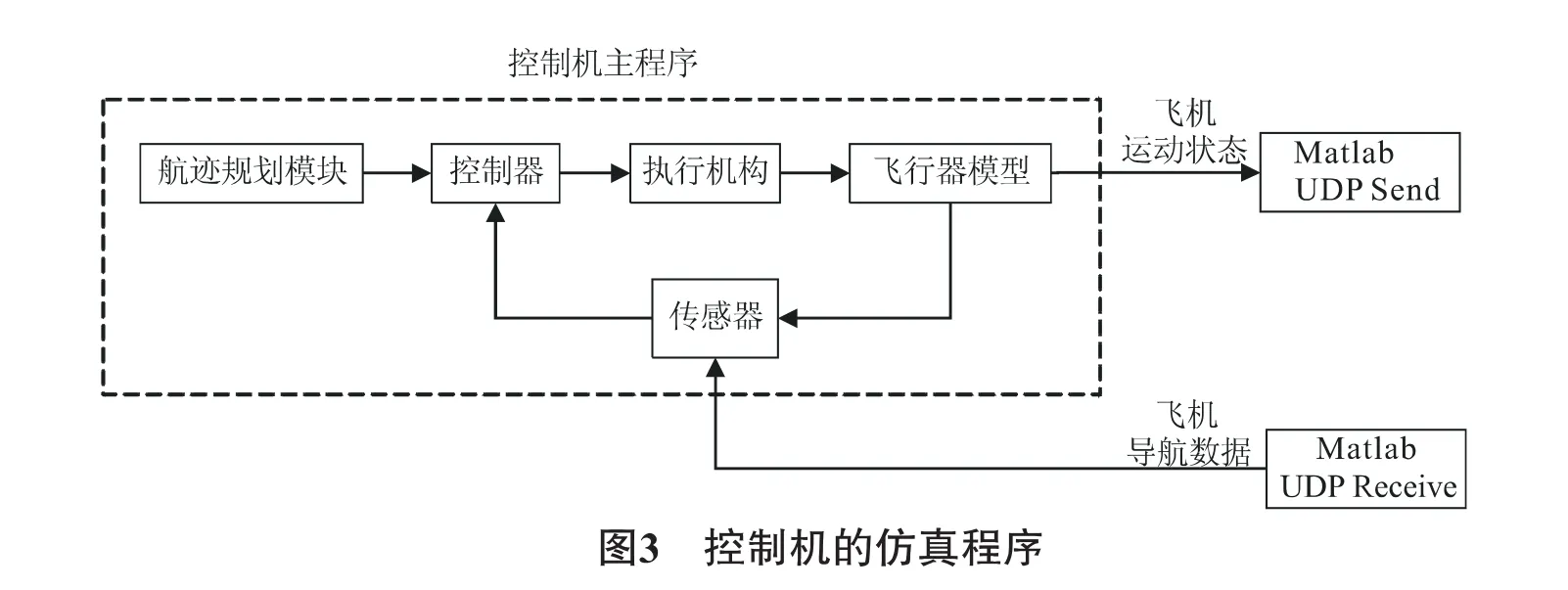
控制機通過傳感器模型獲取控制所需要的反饋信息,從視覺導引系統中獲得飛機的位置信息來控制飛機(數學模型)按照在線實時生成的著陸軌跡完成基于視覺的自主著陸,并將無人機的位姿信息發給視景機.此子系統單獨運行在一臺計算機上的Simulink平臺上,主要包括:航跡規劃模塊;飛行控制器模塊;飛機模型模塊;傳感器模型模塊.
1.3 可視化視景仿真演示系統
視景機專門運行Flightgear,它接受控制機的位姿指令實時刷新視景,其內置的OpenGL模塊能渲染出逼真的視景畫,視景數據實時傳輸到HDMI接口,通過HDMI線纜傳輸到視覺機.為模擬出真實的攝像頭視角的畫面,FlightGear被重新定制,定制的內容有:
1)設置使用外部數學模型,即由外部程序控制其視景顯示的內容;
2)制定通信協議,通過UDP方式將飛機狀態數據共享到網絡中;
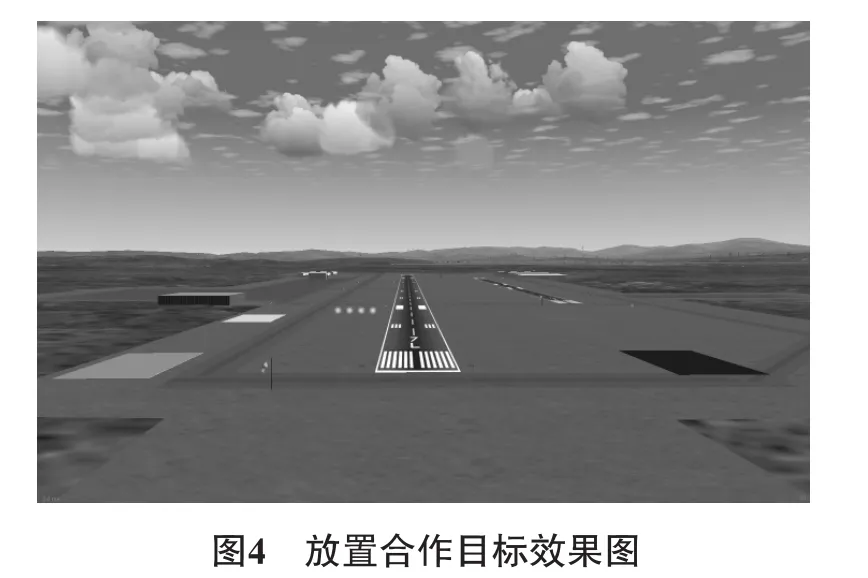
3)設定目標跑道(機場),并在目標跑道周邊放置合作目標;
4)配置攝像頭視角,包括攝像頭在飛機上的位置,光軸方向,云臺控制,像面尺寸,焦距以及單目雙目等;
5)配置環境信息,如光照、氣象等.
1.4 視覺導引系統
視覺機主要由著陸跑道檢測識別與跟蹤、基于視覺的運動參數估計兩大模塊組成.視覺處理機對HDMI采集卡采集到的實時圖像進行處理分析,解算出飛機相對于目標跑道的位置信息,將結果發給控制機.
2 仿真系統的建立
仿真系統的建立包括硬件和軟件,軟件包括應用軟件的安裝、配置和仿真控制程序、視覺算法程序等,其中Flightgear的配置(定制)是系統建立的關鍵.硬件方面需要準備3臺計算機,1臺路由器,UB189 HDMI采集卡和必要的連接線纜.應盡量使用性能高的計算機來組建仿真系統,視景機的顯卡應支持HDMI接口,視覺機應支持PCI-E接口(用于安裝采集卡).
應用軟件方面需要在控制機和視覺機上安裝Matlab,在視景機上安裝Flightgear.Flightgear用于渲染攝像頭視角的畫面,需要配置其使用外部數據驅動飛機模型,并配置畫面的尺寸和視場角的大小.視覺機需要安裝采集卡驅動包,并在Matlab中要啟動對應的支持包,否則圖像不能正確讀取.
2.1 控制機
控制機負責控制算法和模型迭代運算,其程序結構如圖3所示,其中的飛機模型和傳感器模型改自F-16高仿真模型[7],課題組自行開發了飛行控制器模塊和航跡規劃與控制模塊.飛機觸地后視覺機只提供相對于跑道中心線的側偏距信息,且整個過程中飛機的姿態和航向由IMU傳感器(在控制機的傳感器模型中)提供.
2.2 視景機
項目前期主要驗證航跡規劃和航跡跟蹤控制算法,因而降低了跑道識別和跟蹤的難度,通過編輯視景機Flightgear的地景數據庫可精確“放置”如圖4中的合作目標以便于識別跑道,視覺機通過檢測4個色塊來解算飛機相對于跑道的位置.
2.3 視覺機
可以簡化視覺機的任務為合作目標搜索及飛機位置解算[8].分別編寫 VisionSearch 和 uv2xyz[9]2 個函數(圖5),VisionSearch函數負責從圖像中找到4個色塊的中心位置的像素坐標,uv2xyz函數利用這4個坐標值,用正交迭代的方法計算出旋轉矩陣R和平移向量T,進而得到相機在跑道坐標系中的坐標(即飛機的坐標).
2.4 虛擬攝像頭標定
為了從視覺信息中解算出飛機的運動參數,需要對Flightgear的攝像頭內參數進行標定,虛擬攝像頭的標定原理與實物攝像頭的完全相同,可以采用張正友[10]的標定方法,利用 Matlab的 CameraCalibrator[11]工具箱進行標定,先在 Flightgear地景中放置棋盤格標定板,手動操縱飛機到不同的位置,對標定板進行拍照,用標定工具箱對得到的圖像樣本進行標定(如圖6),得到內參數矩陣 M=[1109,0,640.5;0,1109,360.5;0,0,1].


2.5 聯網配置
3臺計算機分別運行3個子系統,通過組網實現高速實時的數據交互,完成分布式聯合仿真.為了避免數據延遲,采用局域網UDP協議進行通訊,并保持局域網內只有這3臺計算機.組網的地址分配和端口分配如圖7所示,3個子系統的程序嚴格按照此設定進行通訊.
3 仿真實驗
實驗前檢查所有的設置無誤,按順序啟動視景機的 Flightgear,視覺機的 Simulink程序,控制機的Simulink程序.飛機從指定進近點開始,依靠視覺機的位置信息順利完成了下滑操作,拉平操作,觸地操作和滑行;從視景機和視覺機的監視器界面可以看到攝像頭視角的著陸全過程,在控制機上可以實時查看飛機運行的參數曲線.距離跑道1 km以內時,視覺得到的位置信息誤差保持在1.0 m以內(對比視景機共享的真值),如圖8.


4 結語
針對現有方案的不足和實際無人機視覺著陸研究工作的需要,本文提出了利用Flightgear渲染實時攝像頭畫面,并利用HDMI高速數字端口進行采集和傳輸圖像信號,以模塊化運行的方式聯網組成閉環仿真系統,利用實驗驗證了該系統能夠完成:
1)視覺導引的圖像算法驗證功能;
2)著陸控制算法驗證功能;
3)視覺導引下自主著陸全過程演示功能.
總之,通過該仿真系統的研制,構建了面向固定翼無人機自主著陸的視覺導引仿真系統,可以解決現有GNC系統的仿真手段不能支持在線實時視覺導引與控制的研究與驗證.
[1]王亮,康鳳舉,鄧紅德,等.基于視覺的無人機著陸半物理仿真系統的應用[J].系統工程與電子技術,2012,34(7):1511-1517.
[2]阮利鋒.小型無人直升機自主著陸視覺導航系統設計及仿真[D].上海:上海交通大學,2009.
[3]ALLERTON D.Principles of flight simulation[M].John Wiley& Sons,2009.
[4]張珍.無人機自主著陸的視覺識別與定位算法設計及仿真研究[D].南京:南京航空航天大學,2008.
[5]徐李云.無人直升機視覺導引著陸驗證實驗平臺系統設計[D].南京:南京航空航天大學,2009.
[6]翟彬,薛明旭.FlightGear在無人機實時飛行仿真中的應用[J].現代電子技術,2010,33(13):24-26.
[7]SHELARE M.Fuzzy logic controller for steady level flight of F-16 aircraft using Matlab and Simulink[D].Texas A& M University-Kingsville,2004.
[8]張琴.基于序列圖像的無人機進近著陸跑道識別與跟蹤研究[J]云南民族大學學報:自然科學版,2014,23(2):146-150.
[9]WONG T Y,KOVESI P,DATTA A.Projective transformations for image transition animations[C]//Image Analysis and Processing,2007,14th International Conference on.IEEE,2007:493-500.
[10]ZHANG Z.Flexible camera calibration by viewing a plane from unknown orientations[C]//Computer Vision,The Proceedings of the Seventh IEEE International Conference on.IEEE,1999,1:666-673.
[11]作者不詳.Camera calibration toolbox for Matlab[EB/OL].[2015 - 03 - 22].http://www.vision.caltech.edu/bouguetj.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
裝備制造技術(2019年12期)2019-12-25 03:06:46
當代陜西(2019年11期)2019-06-24 03:40:28
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
