基于可見光通信精確定位中接收端轉(zhuǎn)動角度的二維研究
2015-11-16 09:04:20梁繡滟
電工技術學報 2015年1期
王 巍 梁繡滟, 王 寧
(1.天津工業(yè)大學電氣工程與自動化學院 天津 300387 2.天津工業(yè)大學 大功率半導體照明應用系統(tǒng)教育部工程研究中心 天津 300387 3.天津工業(yè)大學 電子與信息工程學院 天津 300387)
1 引言
通過比較關于可見光室內(nèi)定位的研究現(xiàn)狀發(fā)現(xiàn),相對于眾多算法來說,目前比較有實踐意義的可見光非成像定位方案,主要分為兩個階段:粗定位和精確定位。粗定位技術是將配備信號控制裝置的LED燈發(fā)出的光的明暗變化作為ID信號發(fā)送[1]。精確定位則是在粗定位基礎上確定接收端所在的具體坐標,常用的分析方法有三角測量法、情景分析法、接近法及VLC和Ad Hoc混合法[2]。三角測量法是最傳統(tǒng)、應用最多的定位方法[2]。
目前人們研究定位算法的假定條件是發(fā)送端與接收端水平面法線互相對準且垂直于天花板,使得φi=ψi,其中,φi為發(fā)送端的輻射角,ψi為接收端的入射角,回避了實際應用中接收端角度改變對接收效果的影響,而當 φi=ψi時,勢必會影響定位效果,導致接收端信噪比下降,缺乏實踐意義。本文利用智能設備的加速器取得接收端平面改變角度情況下進行精確定位,提出了一種可以隨意改變接收端的入射角角度而減小信噪比下降的方法,使得室內(nèi)可見光通信定位系統(tǒng)便宜、實用且可實現(xiàn)。
2 系統(tǒng)設計及實現(xiàn)
2.1 視場角FOV限制和靈敏度限制
Krishnamurthy認為精確度在移動定位系統(tǒng)中是最重要的性能度量[4]。為了將系統(tǒng)性能最大化,通過經(jīng)驗分析和數(shù)據(jù)分析對可見光定位系統(tǒng)定義了兩個詞表征:視場角FOV限制和靈敏度限制[5]。如圖1a被定義為可接收到信號的入射角最大值,物理上對接收端的視場角進行了限制,指接收機能夠接收到從VLC發(fā)送端傳送的VLID信號的范圍。除了視場角限制(FOV limit),當接收的光功率低于接收端靈敏度( RXS),可接收范圍由于信道直流增益的影響減小,接收范圍效果會降低,只有當接收端的光功率 PR大于接收端靈敏度( RXS)時,才能在接收端將VLID進行恢復。
假定一組發(fā)送端和接收端的距離是 d,如圖 1所示。這里φ關于發(fā)送端法線的輻射角,ψ是關于接收端法線的入射角,這些角度都是順時針方向測量。當發(fā)送端信號不在接收端視場角 FOV范圍內(nèi)時,由于接收到的光功率急劇減小,接收端的靈敏度 RXS隨之下降。
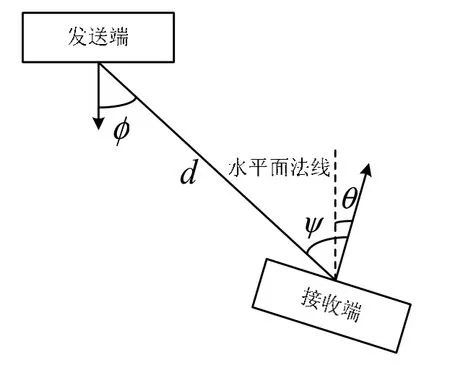
圖1 發(fā)送端和接收端的方位角Fig.1 Azimuths of the sender and the receiver
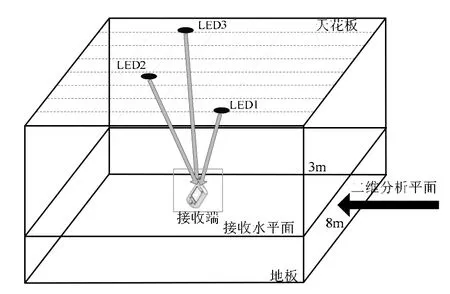
圖2 實驗環(huán)境中發(fā)送端和接收端的位置分布Fig.2 Positional distribution of the sender and the receiver in experimental environment
本文使用加速器來測量接收端平面在三維空間中的轉(zhuǎn)動角度,驗證接收端角度改變對接收端信噪比的影響,描述一種結(jié)合加速器的可見光通信室內(nèi)定位設計方案,使得精確定位系統(tǒng)更加實用。
2.2 系統(tǒng)通信模型
假定LOS鏈路使用3個LED光源作為系統(tǒng)的發(fā)送端,接收端是安裝有光電二極管和加速器的移動設備。發(fā)送端和接收端的位置分布如圖2所示。基于朗伯模型的LOS鏈路信道直流增益[6]
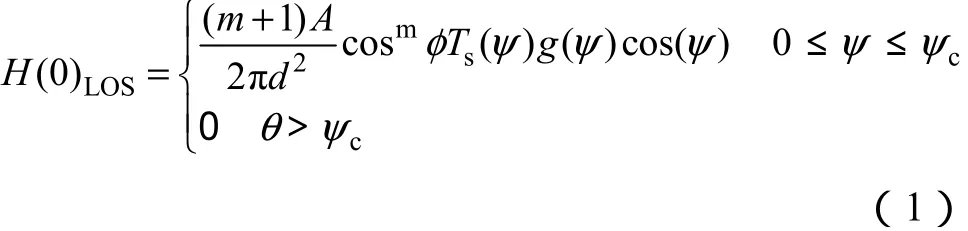
朗伯系數(shù)m與發(fā)送端的半角發(fā)光功率有關,m的值大小決定光束的方向性,通常狀態(tài)下取m=1,其表達式為[6]

式中,Φ1/2為LED輻射的半功率角,接收端探測器的物理面積為A;ψ為相對于接收端法線的入射角;φ為相對于發(fā)送端法線的輻射角,它們的關系如圖1所示,T(sψ)、g(ψ)分別為關于光濾波器和集中器的函數(shù);Ψc為接收端的視場半角(一般小于等于90°);d為發(fā)送端與接收端之間的距離。
當發(fā)送功率為PT,則接收端的光功率為PT=PRH(0)。由于 LED是朗伯光源的特性,因此有T(sψ ) g(ψ)=Gcos(ψ),G為關于濾波器和集中器增益的常數(shù)[7]。當 Φ1/2=6 0°,m=1時接收功率為

式中,C是關于LED、濾波器、集中器及光電二極管的物理特性。接收端的接收功率受散粒噪聲的影響,其信噪比為

式中,Rp為光電二極管的靈敏度;為散粒噪聲的方差值。
3 目標定位算法
發(fā)送端 Ti( i =1 ,2,3)安裝在房間的天花板上如圖2所示,將三維空間的坐標計算分配到二維場景中,利用正弦算法計算接收端的位置坐標。
假定3個發(fā)送端的坐標已知,且通過可見光通信將其地址發(fā)送給接收端 R,這可以通過時分復用技術(TDMA)實現(xiàn)[8]。di為發(fā)送端 Ti和接收端 R之間的距離,φi為發(fā)送端(i=1,2,3)相對于天花板法線的輻射角,令接收端在同一位置進行兩次不同的轉(zhuǎn)動的測量方式A和B進行定位研究,兩次轉(zhuǎn)動角度分別表示為θA、θB,對應的接收端入射角分別為ψi,Aψi,B,接收功率分別為Pi,APi,B,則φi,θA,ψi,A三者之間的關系如圖3所示。
3.1 二維定位算法
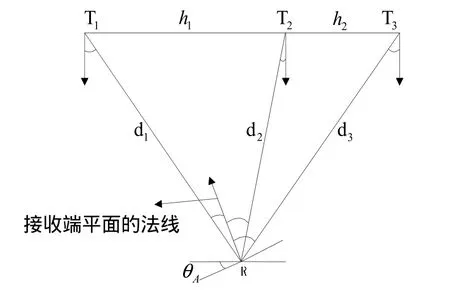
圖3 測量方式A的發(fā)送端和接收端角度關系Fig.3 the angular relationship between the sender and the receiver in the measurement A
由圖可推得兩種轉(zhuǎn)動情況A和B的三角之間的關系式分別為

同理有

上式中,轉(zhuǎn)動角度θA、θB由接收端的加速器獲得,使用光電二極管獲得接收功率Pi,A、Pi,B,根據(jù)式(3)、式(5)和式(6)推得輻射角為φi[6]

由于本系統(tǒng)加速器的使用,因此在θA、θB已知。可見光傳送地址信息時,由于通信媒介和發(fā)送及接收設備引起的噪聲導致誤差的產(chǎn)生,令為φi的估計值。接收端的坐標可通過三邊測量方法得到,令h1為T1和 T2之間的距離、h2為T2和 T3之間的距離,在如圖4由 T1、T2、T3構造的平面三角形中,采用正弦定理求得估算距離得
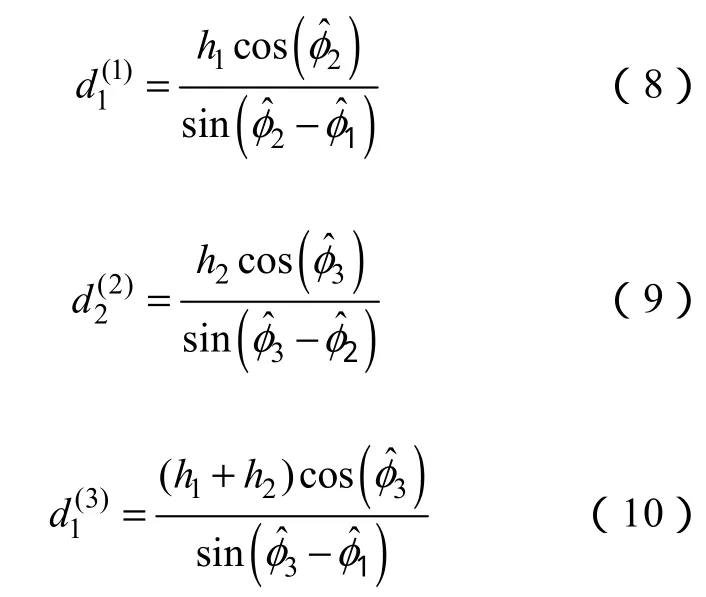
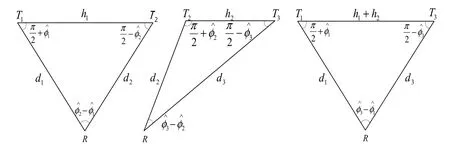
圖4 T1、T2、T3構造的3個平面三角形Fig.4 Triangular configuration of three planes by T1、T2、T3
使用文獻[8]的二維定位算法,在估算接收端位置時僅通過計算估算坐標的幾何中心如式(11)所示[10]

3.2 實驗仿真分析
通過以上分析,當系統(tǒng)沒有噪聲時,式(11)求得的坐標即是移動端的真實位置;考慮兩種導致誤差的因素:接收過程的散粒噪聲和加速器的測量誤差時,二維算法估算的目標坐標與移動端的實際位置存在誤差,本節(jié)通過設定實驗環(huán)境對定位誤差做仿真分析。實驗參數(shù)下表。
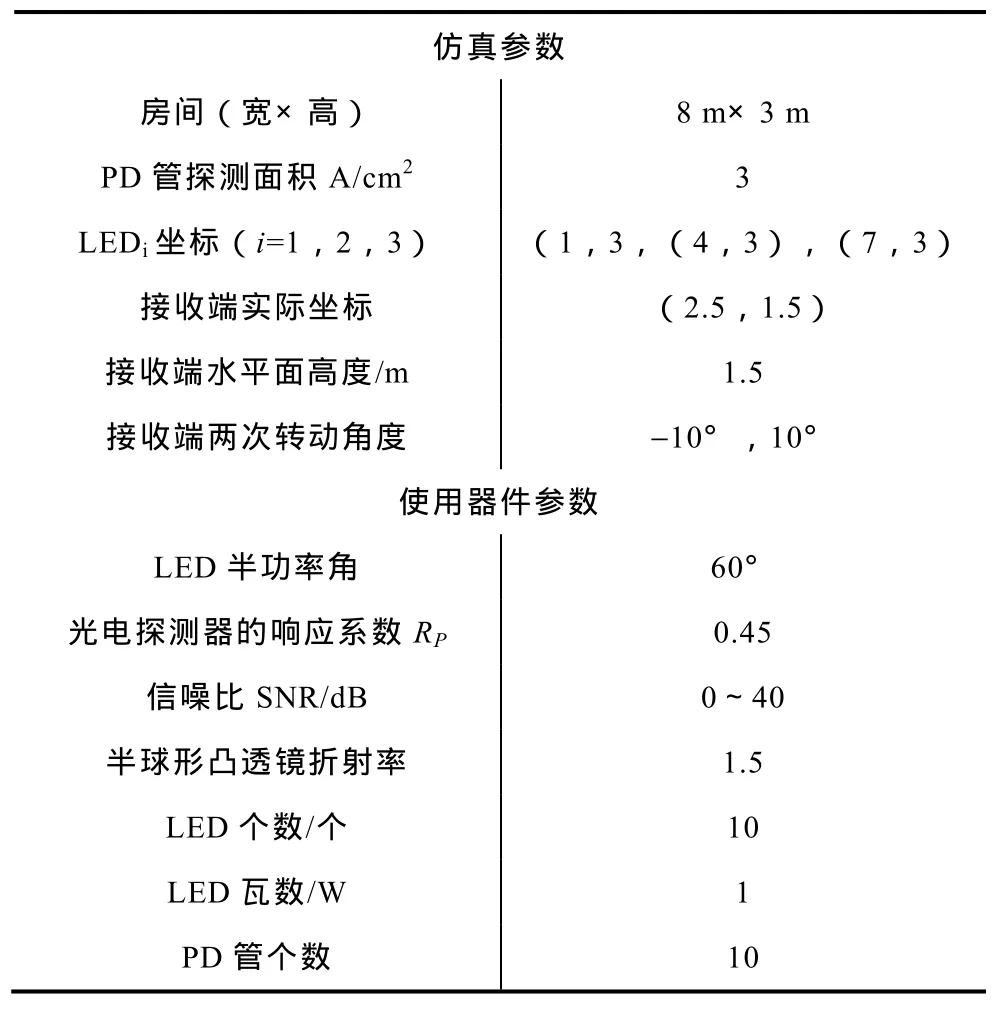
表1 實驗環(huán)境參數(shù)Tab.1 Experimental environment parameters
根據(jù)對視場角FOV限制和靈敏度限制的分析,LED-ID的恢復需要滿足對接收功率的要求,進一步需求接收面限制在視場角范圍內(nèi)。本文在接收端入射角在ψ∈(0,90°)范圍內(nèi)變化時對接收功率的影響進行了仿真如圖5所示,可見隨著接收水平面不斷傾斜時,接收功率不斷減小。
由式(4)得出接收功率與信噪比之間的關系如圖6所示,從圖中可以看出,考慮兩個因素的增益后,可以接收更多的接收功率,接收性能有所提高。
本文介紹的算法在考慮濾波器和集中器的增益計算得到的接收功率和信噪比后,采用加速度傳感器,從而在已知接收端平面轉(zhuǎn)動角度的前提下進行二維定位算法,該算法的定位誤差分析如圖7所示,顯示的是信噪比在10~40 dB時的定位誤差,其中散粒噪聲和加速器的噪聲建模均為具有零平均值的高斯白噪聲,則兩者之和同樣服從N(0,)。假定接收端在房間內(nèi)的坐標為(2.5 m,1.5 m),接收端的轉(zhuǎn)動角度分別為θA=?10°,θB=10°,則接收端位置定位誤差約為10 cm。

圖5 接收平面入射角ψ與接收功率PR關系圖Fig.5 incidence angle in receiver side ψ vs the received power
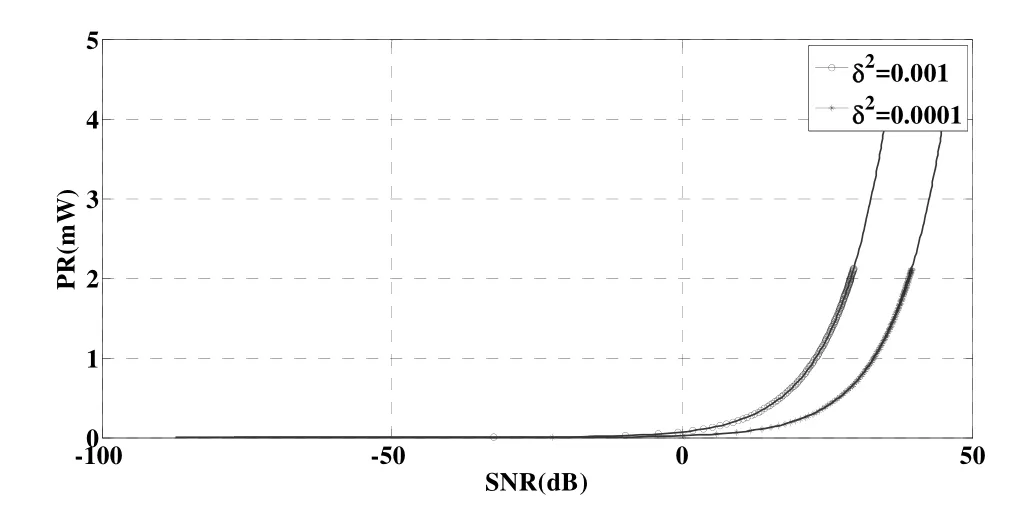
圖6 信噪比SNR與接收功率PR的關系(細實線為考慮濾波器和集中器,粗’o’和’*’線表示未考慮兩個因素)Fig.6 the relationship between SNR and the received power PR
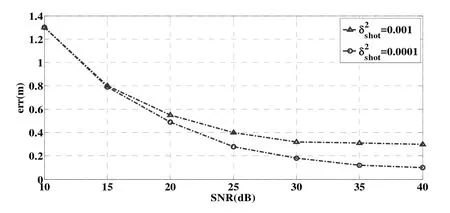
圖7 信噪比與定位誤差的關系Fig.7 relationship between with the positioningerror and SNR
4 結(jié)論
一般在文獻中有兩個假設:①接收端對地的距離是固定且已知的;②發(fā)送端和接收端的軸對齊且都垂直于屋頂。這兩種假設是不切實際的,且不能在實際中得到保證。本文的精確定位算法旨在提出一種沒有以上限制條件情況下的精確定位解決辦法。針對接收端轉(zhuǎn)動角度的偏移,提出了在實際情況中使用接收端進行精確定位過程中,視場角FOV(ψc)限制和靈敏度(RXS)限制兩個因素對可見光精確定位的影響。如今大多數(shù)的智能手機和平板電腦都內(nèi)置了加速傳感器,這種普遍性的裝置可以與可見光室內(nèi)定位系統(tǒng)相結(jié)合,借鑒目前移動設備的加速度傳感器用來測量接收端轉(zhuǎn)動角度,在該轉(zhuǎn)動角度已知的條件下,引入二維定位算法進行精確定位,定位誤差僅為厘米級。
[1] 陳燦峰,譚偉.一種基于可見光信標的室內(nèi)定位系統(tǒng)及實現(xiàn)[J].計算機工程與應用.2015,51(5):82-87.
Chen Canfeng,Tan Wei.Visible light communication based indoor positioning system.Computer Engineering and Applications,2015,51(5):82-87.
[2] 許銀帆,黃星星,等.基于 LED可見光通信的室內(nèi)定位技術研究[J].中國照明電器,2014,4:11-15.
Xu Yinfan,Huang Xingxing,et al.Research on indoor positioning algorithm based on LED visible light communication[J],China Light & Lithting,2014,4:11-15.
[3] Luo Pengfei,Zhang Min,Zhang Xiang,et al.An indoor visible light communication positioning system using dual-tone multi-frequency technique[C].2013 2nd International Workshop on Optical Wireless Communications:25-29.
[4] Krishnamurthy P.Position location in mobile environments[C].Proc.NSF Workshop on Context-Aware Moble Database Management,Providence,RI,Jan.2002.
[5] 6-Axis sensor assisted low complexity high accuracyvisible light communication based indoor positioning system.
[6] Komine T,Nakagawa M.Fundamental analysis for visible light communication system using LED lights[J].IEEE Transactions on Consumer Electronics,2004:100-107.
[7] Zhang W,Kavehrad M.A 2-D indoor localization system based on visible light LED[C].Photonics Society Summer Topical Meeting Series,2012:80-81.
[8] Jung Soo Yong,Hann Swook,Park Chang-Soo.TDOA-based optical wireless indoor localization using LED ceiling lamps[J].IEEE Transactions on Consumer Electronics,2011,57(4):1592-1597.