關于可變船USV航行性能研究
2015-11-23 08:53:18張強強李子圓
大眾科技 2015年10期
關鍵詞:船舶
張強強 李子圓 楊 翔
(浙江海洋學院,浙江 舟山 316002)
關于可變船USV航行性能研究
張強強 李子圓 楊 翔
(浙江海洋學院,浙江 舟山 316002)
型寬值是船舶性能中的一個重要參數,在船舶的穩定性、耐波性以及快速性中起著關鍵作用。相對于復雜多變的環境,固定型寬的船舶難以應付,而可變船寬更能夠改變型寬以適應復雜環境下的工作。文章通過一種機械式可變船寬的方法設計制作了可變船寬雙體USV,并由APM控制系統記錄下USV航行軌跡,進而再從船的不同型寬入手,對船舶的航行阻力及穩定性進行研究,確定船舶航行時的最佳型寬比以滿足船舶安全舒適性同時減少能耗,提升續航力,為船舶在復雜環境下的工作以及節能方面提供了參考。
可變船寬;USV;APM控制系統;航行性能
船舶的航行性能受到船型系型的影響是十分顯著的,船舶的高速性、耐波性、穩性等諸多方面既有聯系又有矛盾。對于小水線面船,總阻力主要由興波阻力和摩擦阻力組成,其中摩擦阻力大小取決于船體濕表面積大小。而雙體船的濕表面積較大,摩擦阻力必然較大。但由于船型瘦長,產生的興波阻力比其他種類的船要低。在低速區域,摩擦阻力占據了主要部分;當速率增大時,興波阻力急劇增大。當船型波的首尾橫波在船尾相交時互為反相,兩個船體產生的波浪相互抵消,興波阻力減小,產生有利干擾。同時在不同的船速下,首尾橫波相交情況均不一樣。
本文所提出的可變船寬雙體 USV可通過改變兩個片體間距,控制首尾橫波相交時相的正反,獲取最佳航行性能,并配合自主研發設計制作的大功率推進器,進而有效地提高該USV的航行性能。
1 船體制作
同噸位的單體船相比,雙體船的總寬度較大,因而往往有更大的甲板面積和艙室容積,尤其適合于裝載那些體積很大而重量不大的低密度貨物,可以具有較高的運輸效率。
將單一船體分成兩個,可以使每個船體更瘦長,從而有可能減小船的興波阻力,尤其在高速時,興波阻力有較大幅度的降低。
1.1船體結構模型設計
主尺度:船長1.70m;型寬0.35L~0.55L;設計空載排水量62kg;滿載排水量120kg;設計巡航速度4kn;最高行進速度6kn。
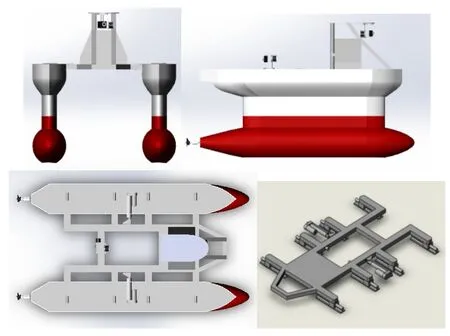
圖1 船體與機械式變船寬設計
1.2壓載水系統
船舯設置了壓載水艙與單體艏部密封艙,通過每個單體內配置的兩個相同功率的單向水泵,可保證船艙內的密封性的同時,控制USV進行變吃水,達到該USV的運輸功能。
1.3變船寬方案
為了實現變船寬的設計要求,本方案采用機械方法來實現變船寬。使用同步進給的兩部電動推桿作為驅動器,使左右對稱的八個滑塊沿滑軌同步滑動,以實現USV兩單體與上層建筑之間的相對移動,從而改變該USV的型寬,達到對航行性能的優化目的(整體裝配見圖1)。
本設計方案中的滑動變化量為 20cm,占初始船寬的28.6%,初始水線寬的33.3%,可在一個相對充裕范圍內獲取良好的航速與間距配合,進而對船體航行性能產生較為顯著的影響。
2 控制單元
2.1APM控制系統
APM是國外的一個開源飛控系統,能夠支持固定翼,直升機,3軸、4軸、6軸飛行器,當然將其移植到航行器上,利用較為成熟且開源的 APM控制技術進行控制系統的自主設計,并引入衛星導航、航線規劃、3DR實時數據采集與記錄等技術,以獲取該USV在不同船型系數下的航行數據進而對其進行分析。
2.2視頻傳輸
相對于傳統的低頻圖像傳輸,將5.8G圖傳、OSD、SJ400攝像頭、視頻切換器進行整合,得到高質量的光學圖像信息,以便于實時了解與控制該USV的航行狀態。
2.3433增程模塊
將控制所使用的2.4G頻率通過433增程進行降頻與信號強化處理,使得該船只的遠程控制得以實現,即超視距控制。
3 方案分析
3.1理論計算
由J·H·密契爾——T·H·海佛洛克薄船理論,對于以等速 V前進的雙體船,其自身行波阻力和干擾興波阻力可用下式表示:



坐標軸原點設置在船體中心線離船艏垂線 L/2未受擾動的水表面處,運動方向為x方向,z軸垂直向上,而y方向為船體的寬度方向。
設定:Ⅰ液體不可壓縮,且均勻連續;Ⅱ液體沒有黏性,運動為無旋;Ⅲ航行波為微波,邊界條件為線性;Ⅳ船體可用分布于y=0的船體中央平面的源匯分布代替。
則有:

故由上式可知,干擾阻力與船型形狀、佛式數和間距船長比有關。
根據上述雙體船型的相關計算公式,筆者可以得出V=1.8~2.2m/s(速度間隔0.2m/s),五個速度區間內相對應的間距對總阻力影響曲線。
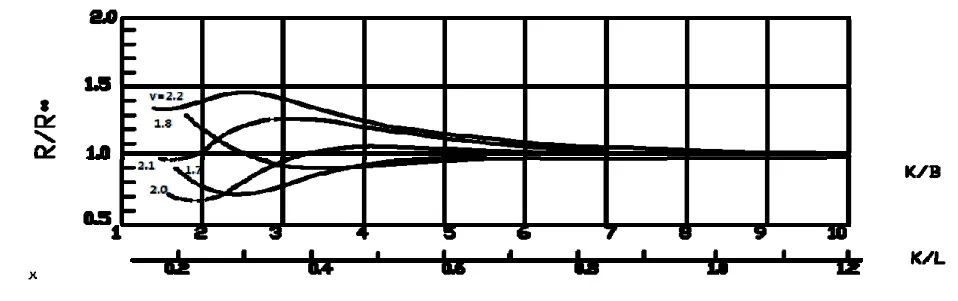
圖2 V=1.8~2.2m/s 時間距對總阻力的影響(理論計算)
從以上分析筆者可以看到,在相同速度區間內兩單體間距對總阻力的影響在前段是比較明顯的,切當速度低于 2m/s時不同航速對應一個最佳間距,其產生的干擾阻力最小。
3.2穩性—間距分析
如圖3、4所示,為實際航行中通過電腦終端接受的數據所進行的數據分析而得到的計算曲線,其中,實際輸出功率p介于300~340w之間(輸出功率由Mission Planner地面站顯示數據計算并進行油門控制得出),兩單體間距取值為0.7m與0.8m。
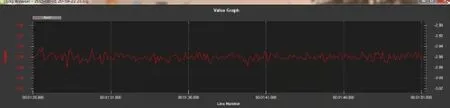
圖3 0.7m單體間距roll值
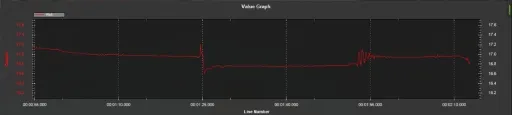
圖4 0.8m單體間距roll值
從兩個不同單體間距在實際航行過程中獲取的 USV roll值數據對比中,可以看出,不同單體間距的情況下,USV的橫穩性是不同的,即通過調整單體間距實現變船寬在調整USV的橫搖、縱搖穩定性方面是具有一定優勢的。
3.3間距—續航力分析
鑒于目前雙體USV的船寬、水線寬在設計制作之初已固化,只能在一個相對較窄的航速范圍內得到較佳的航速-間距配合,故本設計提出了一種可通過改變兩片體間距進而改變船寬、水線寬的雙體USV方案,以達到在同一個USV上得到較大范圍的、多種的最佳航—間距組合,減少航行阻力,進而提高續航能力。
4 總結
在無人駕駛領域,相比于無人機、無人汽車的高關注度,無人船還處在起步階段。國產無人水面艇目前面臨的最大問題,仍然是技術。國際上無人水面艇領域的研究起步于十年以前,以美國、以色列的軍用無人水面艇為主導。不同于無人機市場的激烈競爭,全世界只有20多家企業生產無人水面艇,而且這個產業在國內幾乎是空白的。但是無人水面艇前景廣闊,應用價值不可小覷。
本文的研究表明船寬對雙體船的航行性能是有一定的影響的,通過改變船的船寬可以有效降低船在航行中的阻力、提高船的橫搖、縱搖穩定性及續航力。
[1] 蔣慰昌.雙體船阻力的模型試驗和理論計算[J].中國造船,1965,(59):22-23.
[2] 沈玉林,宋國華.船型系數對雙體船阻力的影響[J].艦船科學技術,1984,(8):82-90.
[3] 楊宋林,楊大明.小水線面雙體船的性能優勢及其應用概括[J].造船技術,2000,(3):2-3.
[4] 馮大奎,程爾升.SWATH阻力的數值計算方法及其性能試驗[J].船海工程,2004,(2):7-9.
[5] 葛緯楨,郭值學.小水線面船的運動穩定性[J].中國造船, 2000,41(3):28-34.
Study on variable sailing ship USV performance
Type wide value is an important parameter in ship performance, in the stability of the ship, seakeeping and quickness plays a key role. Relative to the complicated and changeable environment, fixed type ship is difficult to cope with wide, instead of variable width is more wide type can change to adapt to the complex working environment. In this paper, a mechanical variable method to design the variable boat ship wide wide catamaran USV, and record the USV is controlled by the APM system trajectory, and then from different type of wide, study of ship resistance and stability of the ship, determine the best type of navigation when wide than to meet the ship safety comfort while reducing energy consumption, improve endurance, for the ship working in the complex environment and provides reference to save.
Variable breadth; USV; APM control system; navigation performance
G301
A
1008-1151(2015)10-0042-03
2015-09-11
2015年浙江海洋學院大學生科技創新項目(xj201529)。
張強強(1994-),男,浙江海洋學院學生。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30