網絡化旋轉激光經緯儀的現場平差標定方法
2015-11-24 03:24:49李培林
激光與紅外 2015年11期
賈 昆,李培林,王 崴,潘 曉
(空軍工程大學防空反導學院,陜西 西安 710051)
?
·激光應用技術·
網絡化旋轉激光經緯儀的現場平差標定方法
賈 昆,李培林,王 崴,潘 曉
(空軍工程大學防空反導學院,陜西 西安 710051)
針對網絡化旋轉激光經緯儀定位系統在現場環境中標定精度低、過程復雜以及成本高等問題,提出了一種高精度快速的現場平差標定方法。利用標定桿采集空間標定點建立發射機與標定桿坐標系轉換關系,間接聯系發射機之間的位姿關系,并采用最小二乘原理求解系統外參數估算值;以外參數估算值為初值,采用非線性優化的方法求解系統外參數最優值,實現系統全局標定。該現場平差標定方法實現了在5000 mm×5000 mm范圍內系統測量精度為0.12 mm,重復定位精度為0.02 mm,能夠滿足實際現場應用要求。
大尺寸測量;旋轉激光經緯儀;平差標定;標定桿
1 引 言
隨著航空、航天、船舶、汽車等領域在制造裝配過程中對大型部件精確定位和位姿實時測控的要求不斷提高,大尺寸測量系統,如經緯儀測量系統、工業近景攝影測量系統、激光跟蹤儀、網絡化旋轉激光經緯儀定位系統[1-3]等,在工業領域中的應用越來越廣泛[4-7]。其中,網絡化旋轉激光經緯儀是結合經緯儀原理和GPS原理開發的新型大尺寸空間測量系統,能夠精確測量被測部件的空間三維坐標,該系統由發射機網絡和傳感器組成,具有測量精度高,測量范圍近似等精度擴展,多目標并行測量等優點,通過增加發射機來擴大測量范圍,協調了測量精度與大空間的矛盾,然而,發射機越多,分布空間越廣,系統標定過程就越復雜,網絡化測量系統基站坐標系統一精度直接限制系統的測量精度。
文獻[8]和[9]提出了基于經緯儀的全局標定方法,文獻[10]提出了基于激光跟蹤儀的全局標定方法,此類全局標定方法均借助大型輔助測量設備,操作過程較繁瑣且成本高,難以達到現場快速標定的要求。針對這一問題,文獻[11]提出了基于多對相交激光線的全局標定方法,該方法避免了使用其他測量設備,但受外界環境影響較大,難以在復雜現場環境中應用。在此基礎上,文獻[12]提出了利用接收器設計直角靶標的平差標定,該方法雖然操作簡單,但制約了系統的測量范圍,難以滿足大尺寸空間測量的要求。
針對網絡化旋轉激光經緯儀在現場環境中的標定問題,根據系統測量原理,提出了高效實用的現場平差標定方法,主要研究了系統數學模型和現場平差標定算法。采集空間標定點作為已知點,建立發射機與標定桿坐標系轉換關系,以最小二乘原理求解系統外參數估算值并作為初值,然后以標定桿長為約束建立目標函數,基于Levenberg-Marquardt算法[13-14]采用非線性優化的方法求解外參數最優值,實現系統測量數據統一。在此基礎上,進行了實際標定測量實驗和重復性測量實驗,分析了現場平差標定后系統測量精度和重復定位精度,驗證了該方法的可行性。
2 測量系統工作原理
網絡化旋轉激光經緯儀由發射機網絡和傳感器組成[1-3],每臺發射機發出2個扇形激光平面,工作時在電機的驅動下對空間進行360°掃描,每4臺發射機作為測量單元,多個測量單元連接構成測量網絡,置于待測點處的傳感器接收多臺發射機的激光信號,基于發射機幾何結構,計算出激光平面方程,根據空間平面前方交匯原理計算出待測傳感器的三維坐標。系統測量過程如圖1所示。
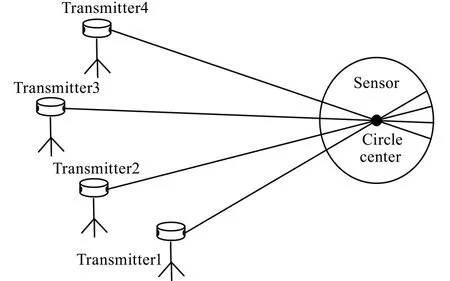
圖1 系統測量過程
測量系統中發射機幾何模型如圖2所示,i=1,2,…,n為發射機編號,每臺發射機有自身坐標系Oi-XiYiZi,激光平面LP1i掃過參考傳感器時刻作為計時零點,平面LP1i、LP2i在發射機坐標系下的初始法向量分別為H1i=(A1i,B1i,1)T、H2i=(A2i,B2i,1)T,是結構參數,稱為系統內參數,激光平面繞旋轉軸旋轉時,兩個激光平面先后掃過待測點S,激光平面相對初始位置的旋轉角度分別為θ1和θ2,通過S點時,激光平面的法向量為:
Hθ=RθH
(1)
式中,Rθ為旋轉矩陣。
H為激光平面初始法向量。
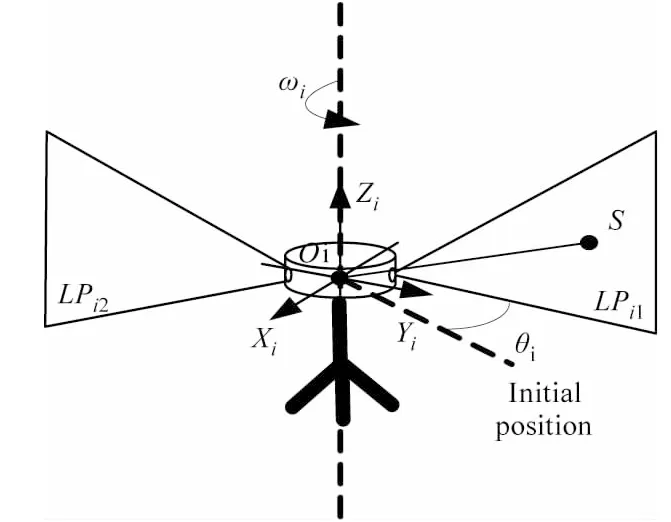
圖2 發射機幾何模型
由式(1)建立通過S點的激光平面方程:
Hθ·(S-O)=0
(2)
式中,S為待測點坐標;O為發射機坐標系原點坐標。
由式(1)和式(2)建立單臺發射機激光平面的平面方程組,即圖1中通過待測點的空間直線方程:
(3)
每個測量單元以4條空間直線基于最小二乘原理求解待測點坐標。
由于發射機有各自的坐標系,因此要實現坐標數據的統一,必須將發射機坐標系變換到世界坐標系下。單臺發射機變換過程:
RiLi+Pi
(4)
式中,Li為發射機到待測點方向矢量;Ri、Pi為發射機到世界坐標系的轉換矩陣,稱為系統外參數。
因此,建立系統數學模型:
(5)
Ri為發射機到世界坐標系的旋轉矩陣,含3個未知量即發射機坐標系X、Y、Z軸相對于世界坐標系X、Y、Z軸的旋轉角α、β、γ;Pi=(pxi,pyi,pzi)T為發射機坐標系原點在世界坐標系下坐標;H1i和H2i是系統內參數;R1i、R2i是激光平面從初始位置到待測點的旋轉矩陣,是θ1和θ2的函數;S為待測點坐標。
因此,系統進行測量之前需要先對數學模型中的內參數H1i和H2i以及外參數Ri和Pi(即αi、βi、γi、pxi、pyi、pzi)進行標定,利用最小二乘原理求解式(5),計算出待測點S的空間坐標。
3 現場平差標定原理
本文提出的現場平差標定方法是在內參數已知的前提下,精確標定系統外參數。首先通過多次擺放標定桿采集空間標定點,可建立發射機與標定桿坐標系之間的轉換關系,將所有發射機統一到發射機1坐標系下,以求解系統外參數估算值;然后以外參數估算值作為初值,采用非線性優化的方法求解系統外參數最優值,實現系統全局標定。標定桿模型如圖3所示。
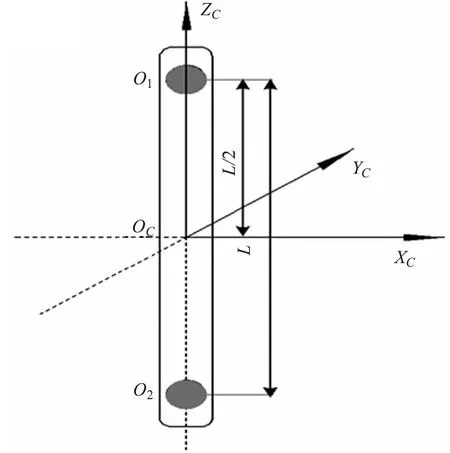
圖3 標定桿模型
主要由二維桿和光電傳感器組成,光電傳感器之間的距離已知且為定值。為了簡化標定模型,采集標定點過程中,標定桿盡量豎直放置,具體標定過程如下。
3.1 求解外參數估算值
如圖4所示,在采集空間標定點過程中,設標定桿在第一個位置建立的坐標系為標定桿坐標系,記為Oc-XcYcZc,即所有采集位置的標定點坐標均在Oc-XcYcZc下。
(6)
其中,Tk1是位置k相對于標定桿坐標系原點的平移矢量。
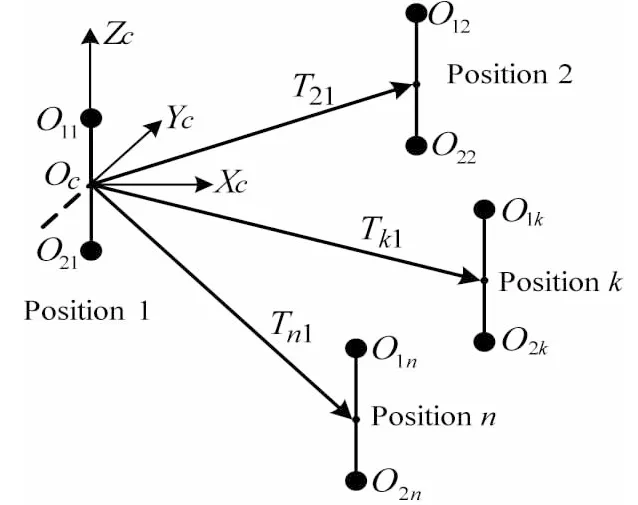
圖4 標定點采集過程
在此基礎上,采集空間標定點,將發射機轉換到標定桿坐標系下,完成初步定向。
1)標定桿置于位置1時,根據式(5)建立單臺發射機與標定桿定向模型:
(7)
2)標定桿置于k位置時,由式(7)得:
(8)
(9)
其中,Tk1=(txk1,tyk1,tzk1)T是標定桿在k位置到位置1的平移矢量,含3個未知量;Ri和Pi與位置1時一致。
因此,標定桿移動一個位置將增加3個未知數及4個方程。移動n個位置時,根據式(7)建立定向約束方程組,方程共4n個,未知數共6+3(n-1)個,基于最小二乘原理求解該方程組計算Ri和Pi,得到發射機與標定桿坐標系的轉換關系。其中,發射機i到發射機1的轉換關系:
(10)
式中,Ri1為發射機i到發射機1的旋轉矩陣;Pi1為發射機i坐標系原點在發射機1坐標系下的坐標;Ri1和Pi1為系統外參數估算值。
3.2 求解外參數最優值
外參數估算值作為迭代優化初值,以標定桿長為約束建立目標函數:
(11)
式中,Li為標定桿置于位置i時兩端光電傳感器之間距離計算值;L為標定桿兩端光電傳感器實際距離。
在測量空間內以任意姿態放置標定桿,測量標定桿兩端光電傳感器的空間坐標,并采用Levenberg-Marquardt方法對式(11)進行非線性優化,得到系統外參數最優值,實現系統全局標定。現場平差標定流程圖如圖5所示。

圖5 現場平差標定流程圖
4 實驗結果和分析
為了驗證現場平差標定方法的可行性,進行了實際標定測量實驗和重復性測量實驗,分別對標定精度和重復定位精度進行分析。實驗中以4臺發射機作為標定單元,近半圓形布置,各發射機間相距約2 m,在距離發射機約5 m處放置標定桿,借助水平儀保證標定桿盡量豎直放置,標定桿實物圖如圖6(a)所示,網絡式旋轉激光經緯儀如圖6(b)所示。

圖6 標定桿和測量系統實物圖
實驗中利用高精度三維運動平臺進行系統內參數標定。將傳感器置于三維臺上,控制三維運動平臺采集標定點數據,采集方式為:3行11列,行距是100 mm,列距是50 mm,通過優化求解由8個平面方程構成的超定方程組,得到發射機內參數,作為現場平差標定已知條件,并按圖5所述流程對系統進行現場平差標定。
為檢測現場平差標定的標定精度,實驗中借助一個兩端分別布置傳感器的標準桿,桿長經過激光跟蹤儀測量為L=914.173 mm,標準桿置于測量空間內不同位置,用經過現場平差標定方法標定的系統測量兩端傳感器坐標,計算桿長,并與實際值(914.173)進行比較。表1為現場平差標定后系統測量不同位置標準桿端點的空間坐標及桿長測量值與實際值比較結果。
為檢測現場平差標定方法標定后系統重復定位精度,本文進行了系統重復性測量實驗,對系統重復精度進行分析,用標定后的系統測量空間內25個固定點,每個點重復測量30次,各坐標分量重復定位精度如圖7所示。
對于網絡化旋轉激光經緯儀,分別進行標定測量實驗和重復性測量實驗,分析實驗數據可以得到以下結論:
1)由表1可以看出,現場平差標定后,系統測量桿長與實際桿長相比,偏差在±0.12 mm內,充分驗證該方法的可行性。
2)由圖7可以看出,現場平差標定后,系統對固定點進行重復測量,各坐標分量重復定位精度為0.02 mm,滿足現場應用要求,而且在實驗過程中,現場平差標定方法操作簡單、標定速度快,能夠大幅度提高工作效率,充分體現了該方法在現場應用中的優越性。

表1 測點三維坐標及比對結果(單位:mm)
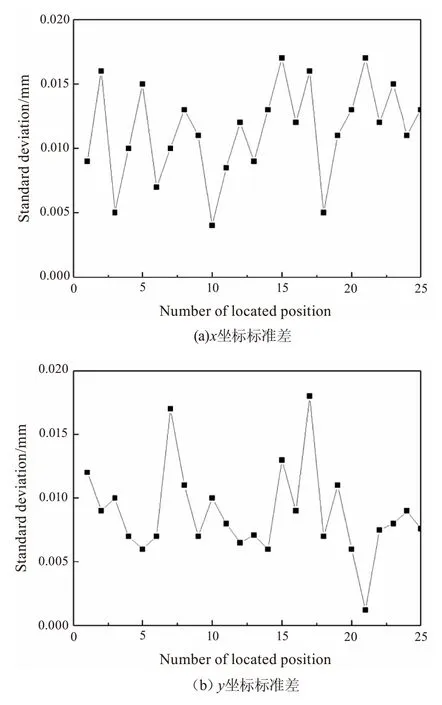

圖7 系統重復定位精度
3)分析上述數據可以看出,現場平差標定仍具有一定誤差,原因主要在于電機轉速波動、發射機轉軸偏擺以及傳感器信號提取存在偏差,因此,通過減小硬件誤差,有利于提高標定精度和系統測量精度。在后續工作中,將在提高系統精度方面做進一步研究。
5 結 論
為解決網絡化旋轉激光經緯儀在現場環境的精確標定問題,根據系統測量模型,提出了一種高精度快速的現場平差標定方法,該方法利用標定桿采集標定點,建立系統定向模型,得到系統外參數估算值;基于Levenberg-Marquardt算法采用非線性優化方法求解外參數最優值,統一系統測量數據。實驗結果表明,現場平差標定方法實現了在5000 mm×5000 mm范圍內系統測量精度為0.12 mm,重復定位精度為0.02 mm,并分析了產生誤差的原因,通過改善硬件誤差對整體測量的影響,標定精度和系統測量精度將進一步提高。
[1] LIU Zhigang,XU Yaozhong,LIU Zhongzheng,et al.A large scale 3D positioning method based on a network of rotating laser automatic theodolites[C].Harbin:International Conference on Information and Automation,2010:513-518.
[2] Muelaner J E,WANG Z,Martain O,et al.Verification of the indoor GPS system,by comparison with calibrated coordinates and by angular reference[J].Journal of Intelligent Manufacturing,2012,23(6):2323-2331.
[3] LAO Dabao,YANG Xueyou,ZHU Jigui,et al.Constructing measuring network with scanning planar laser space position systems[J].Journal of Optoelectronics Laser,2011,22(2):261-265.(in Chinese)
勞達寶,楊學友,邾繼貴,等.掃描平面激光空間定位系統測量網絡的構建[J].光電子·激光,2011,22(2):261-265.
[4] HE Binggao,AN Zhiyong.Research on horizontal measurement technology based on laser radar[J].Laser & Infrared,2014,44 (8):866-869.(in Chinese)
何秉高,安志勇.基于激光雷達的水平測量技術研究[J].激光與紅外,2014,44(8):866-869.
[5] SUN Bo,ZHU Jigui,REN Yu,et al.A novel method for calibrating linear array cameras based on laser tracker[J].Journal of Optoelectronics·Laser,2014,25(2):311-316.(in Chinese)
孫博,邾繼貴,任瑜,等.一種利用激光跟蹤儀標定線陣相機的方法[J].光電子·激光,2014,25(2):311-316.
[6] LU Rongsheng,LI Wanhong,LAO Dabao,et al.Angular error compensation for laser tracker[J].Optics and Precision Engineering,2014,22(9):2299-2305.(in Chinese)
盧榮勝,李萬紅,勞達寶,等.激光跟蹤儀測角誤差補償[J].光學 精密工程,2014,22(9):2299-2305.
[7] ZHI Qiang,HUO Yujing,GONG Ke.Handheld laser rangefinder and its transmitter circuit[J].Laser & Infrared,2013,43(5):532-535.(in Chinese)
智強,霍玉晶,鞏軻.手持激光測距儀及其發射電路[J].激光與紅外,2013,43(5):532-535.
[8] ZHANG Guangjun,WEI Zhenzhong.Unique world coordinates based global calibration method for multi-vision inspection system[J].Journal of Beijing University Aeronautics and Astronautics,2007,32(11):1268-1272.(in Chinese)
張廣軍,魏振忠.多視覺檢測系統的世界坐標系唯一全局標定方法[J].北京航空航天大學報,2007,32(11): 1268-1274.
[9] Lu R S,Li Y F.A global calibration method for large-scale multi-sensor visual measurement systems[J].Sensors and Actuators A:Physical,2004,116(3):384-393.
[10]LI Zhe,DING Zhenliang,YUAN Feng.Global calibration method for multi-vision measurement system with coplanar targets[J].Optics and Precision Engineering,2008,16(3):467-472.(in Chinese)
李喆,丁振良,袁峰.基于共面點的多視覺測量系統的全局標定[J].光學 精密工程,2008,16(3):467-472.
[11]LIU Q Z,SUN J H,LIU Z,et al.Global calibration method of multi-sensor vision system using skew laser lines[J].Journal of Mechanical Engineering,2012,25(2):405-410.
[12]LAO Dabao,YANG Xueyou,ZHU Jigui,et al.Study on calibration technology of network laser scan space positioning system[J].Journal of Mechanical Engineering,2011,47(6):1-6.(in Chinese)
勞達寶,楊學友,邾繼貴,等.網絡式激光掃描空間定位系統標定技術研究[J].機械工程學報,2011,47(6):1-6.
[13]Moré J J.The Levenberg-Marquardt algorithm:implementation and theory[M].Numerical Analysis:Springer Berlin Heidelberg,1978:105-116.
[14]SUN Junhua,WU Ziyan,LIU Qianzhe,et al.Field calibration of stereo vision sensor with large FOV[J].Optics and Precision Engineering,2009,17(3):633-640.(in Chinese)孫軍華,吳子彥,劉謙哲,等.大視覺雙目視覺傳感器的現場標定[J].光學 精密工程,2009,17(3):633-640.
Field adjustment calibration method of network rotary laser theodolites
JIA Kun,LI Pei-lin,WANG Wei,PAN Xiao
(College of Air and Missile Defense,Air Force Engineering University,Xi’an 710051,China)
As positioning system of network rotary laser theodolites (R-LTs) has low accuracy,complex process and high cost of calibration in the field environment,a high-precision and rapid field adjustment calibration method is proposed.The transform relations between the coordinate system of transmitters and the coordinate system of calibration bar are established by collecting space calibration points using a calibration bar.As a result,the pose relations of transmitters are indirectly linked.And the estimated value of the external parameter is solved by the least square principle.Then the estimated value is used as initial value to compute the optimal solution of the external parameter using non-linear optimization methods.And a global calibration is realized finally.The experimental results show that the field adjustment calibration method realizes that the measurement precision of system is 0.12 mm and repeatability precision is 0.02 mm in the range of 5000 mm×5000 mm,which can satisfy the practical field application requirements.Key words:large-scale measurement;rotary-laser theodolites;adjustment calibration;calibration bar
1001-5078(2015)11-1292-06
國家自然科學基金項目(No.51405505)資助。
賈 昆(1991-),男,碩士,主要從事激光測量技術方面的研究。E-mail:kunjia0131@163.com
2015-03-21
TB92;TP274
A
10.3969/j.issn.1001-5078.2015.11.002
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年9期)2018-08-04 03:31:04
電子制作(2018年12期)2018-08-01 00:48:02
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
西部廣播電視(2015年9期)2016-01-18 03:46:07
西部廣播電視(2015年3期)2016-01-15 02:05:45
Coco薇(2015年1期)2015-08-13 02:47:34
