內嵌式永磁同步電機改進型解耦控制
2015-11-25 09:30:24吳荒原王雙紅辜承林邵可然孫劍波
電工技術學報 2015年1期
關鍵詞:系統
吳荒原 王雙紅 辜承林 邵可然 孫劍波
(華中科技大學強電磁工程與新技術國家重點實驗室 武漢 430074)
1 引言
內置式永磁同步電機(IPMSM)永磁體埋入轉子內部,其轉子機械強度高,可靠性高,另外IPMSM具有磁阻轉矩,可以利用磁阻效應來提高恒轉矩性能和擴展恒功率范圍,同時IPMSM 具有高功率密度和高效率,這些特點使得IPMSM 廣泛應用于電動汽車和工業牽引領域。IPMSM 不能直接控制轉子磁鏈大小,但可以通過調整電樞電流來削弱氣隙磁場,這種控制模式稱為弱磁控制。弱磁控制的研究始于20 世紀80 年代中期,并于90 年代初形成了完善的弱磁理論。由于永磁同步電機的參數變化導致電流規劃困難,學者們一直在研究弱磁控制策略,以期達到IPMSM 系統保持高性能的目的。目前國內外所有的弱磁理論研究中,弱磁控制算法都基于準確的參數模型,如磁鏈、電感、電阻等參數[1]。而實際應用中由于飽和效應的影響,電機在不同負載和轉速條件下,其參數會發生變化,特別是電感參數受電流影響較大。從永磁同步電動機的數學模型來看,它具有非線性及變量耦合的特點,要使IPMSM 系統保持高性能,精確的電流軌跡控制至關重要。在高精度軌跡跟蹤的場合,需要對這種具有非線性和變量耦合特點進行處理[2]。
至今為止,PI 控制器以其簡易性、魯棒性等優點仍廣泛應用于永磁交流電機驅動,但內嵌式永磁同步電機其d 軸電流不為零,因此其PI 制器是一個非線性,多輸入的耦合系統,在IPMSM 控制系統中,傳統PI 電流控制器的性能難以提升,為了提高PI 控制器的性能,文獻[3-7]設計了電流解耦控制器,并提出要進行電流解耦,必須進行準確的參數辨識。
目前參數辨識主要有離線測量和在線檢測兩種方法,但是離線檢測法需要大量的實驗數據[8,9],并且控制對象單一,算法不適合移植,為了保證參數在線辨識的準確性和魯棒性,文獻[10]提出了最小二乘法,這種方法能預先估計參數,改善了參數在線辨識的性能,但其抗噪聲干擾能力較弱。文獻[11-13]采用模型參考自適應方法,改進了參數在線辨識策略,提高了檢測魯棒性,但其算法較為復雜。
文獻[14-16]設計了兩種傳統型PI 控制器,在此基礎上詳細推導出了解耦控制的條件和方式,并通過零極點的配置來設計控制器,但這種方法在低速時的幅頻響應特性不好。文獻[17-20]分析了參數與電機調速性能與效率的關系,并提出了對應的解決方法,但是方法通用性不強,不適于移植。
本文提出了一種IPMSM 參數在線辨識算法,該算法形成閉環反饋,并加恒定量型前饋,使其具有良好的穩態及動態性能,基于此種辨識算法,設計了一種改進型電流解耦控制器,并分析了參數辨識誤差對此種電流解耦控制器幅頻特性的影響,可以看出,該解耦控制器在整個恒轉矩區及恒功率區范圍內都具有優異的幅頻特性。仿真及實驗表明了本文方法能有效地提升PI 控制器的性能,改善了系統的靜態及動態性能,實驗結果表明系統在動態情況下速度無超調,在負載突變情況下,電機轉速能迅速穩定且無擾動現象,在靜態穩定過程中轉矩脈動小。
2 IPMSM 數學模型及控制理論
2.1 數學模型
假設內置式永磁同步電機具有正弦反電動勢,那么在轉子同步旋轉d-q 坐標系中,IPMSM 電機的數學模型為

2.2 恒轉矩區控制
由于IPMSM 存在凸極比,具有磁阻轉矩,因此可以合理利用磁阻轉矩。目前研究中,普遍采用最大轉矩電流比控制(MTPA),使相同電流幅值條件下,能獲得最大轉矩。此時d-q 軸電流矢量應滿足方程

實際應用于微處理芯片時,精確的MTPA 數學模型難以在DSP 及其他控制器中實現,可以利用麥克勞林級數將方程(3)展開為

代入表2 中的樣機參數可知,雖然iq階數增加,但相應項的值卻在急劇減小,四階以上多項式和只占總值的0.3%,因此,d-q 軸電流關系可以簡化為

2.3 恒功率區控制
在高速運轉下的IPMSM 系統,其轉速受到反向電動勢的限制,當速度大于基速時,若不采取弱磁控制,電流控制器會出現飽和失控現象。在滿足電流及電壓限制的弱磁控制中,忽略定子繞組壓降,電流id和iq應滿足方程

與恒轉矩區一樣,可以簡化電流控制器的設計。首先定義ωcλf=vmax,然后將定義速度標幺值的形式為ωpu=ω/ωc,與恒轉矩區一樣,利用麥克勞林級數展開,忽略高階電流多項式,可得恒功率區電流方程為
圖1 中,簡化MTPA 及弱磁曲線可以很好地擬合基準曲線,大大減小微處理器的計算量。
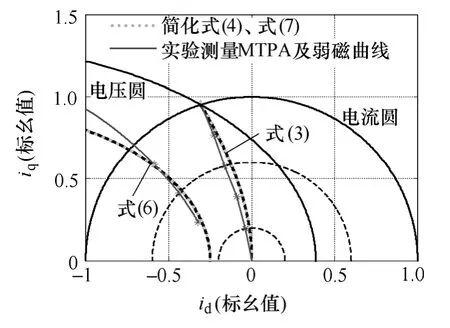
圖1 IPMSM 電流控制軌跡Fig.1 Current trajectory of the IPMSM
3 參數在線辨識策略
3.1 辨識算法
由圖 1 可以看出,由于電感參數變化,實際MTPA 及弱磁曲線與理想方程出現偏離,因此精確實時的電感參數,對IPMSM 系統性能改進有重要作用。文獻[14]對比了三種電感辨識方法,其分析指出,模型參考自適應控制(MRAC)方法易于實現,在永磁磁鏈較為穩定的情況下,其結果是準確可靠的。在實際應用中,控制系統檢測周期非常短,因此在一個檢測控制周期中,可認為電機處于穩狀,其電流變化率為零,從而忽略導數項,得出參數辨識方程為
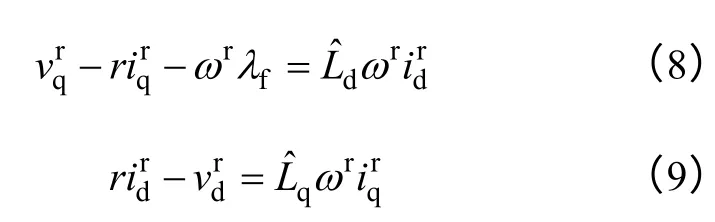
基于模型參考自適應的參數在線檢測策略如圖2所示,計算方法基于方程式(8)和式(9),但應用中必須加入其他環節。由于應用系統中采用SVPWM電壓模式,因此算法中加入低通濾波器,以減少高頻電壓噪聲對參數辨識的干擾,為改進電機起動時或動態時的參數檢測的可靠性,加入PI 控制器,形成閉環系統,為改善參數辨識過程中的動態性能,加入額定狀態下恒定參數Ldrate、Lqrate進行前饋處理。

圖2 參數在線檢測策略Fig.2 On-line parameter estimation strategy
3.2 算法分析
方程式(8)、式(9)中包含永磁磁鏈及電阻參數,在永磁電機控制系統中,一般都假設永磁磁鏈和電阻恒定,但實際系統中磁鏈和電阻參數都受到溫度變化影響,由辨識方程可知,在低速區或低轉矩區,電阻上的壓降和耦合項Lqωriq,ωrλf對參數辨識影響不大,但是高轉矩及高速區時,需要對參數敏感性進行分析。圖3 給出了電機額定轉速下,電阻及磁鏈參數變化對參數辨識的影響,為在電流解耦控制器設計中的改進措施提供依據。由圖可以看出在低轉速輸出時,q 軸電感對電阻變化較為敏感,在高轉矩區時,則是d 軸電感對電阻變化更為敏感。由于反向電動勢及耦合項的影響,相對于電阻而言,電感辨識對磁鏈參數的變化更為敏感。
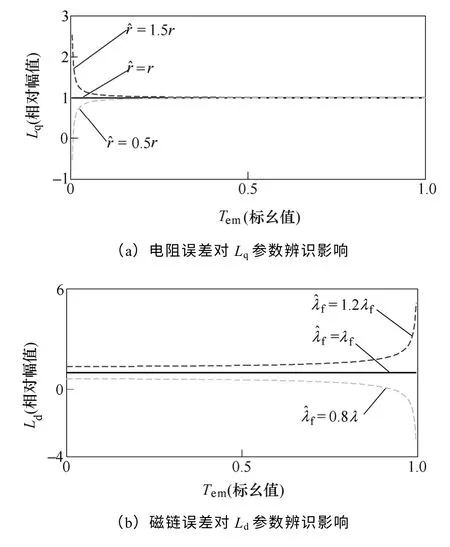
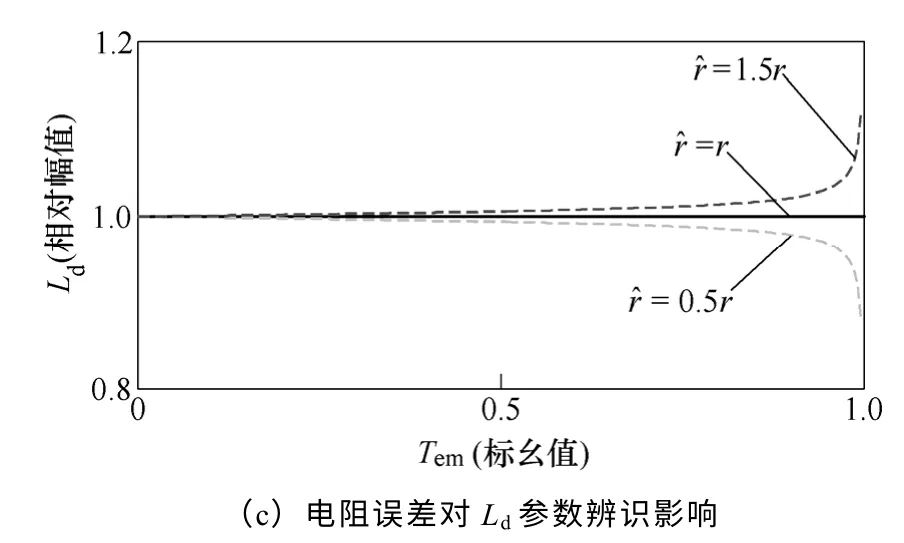
圖3 額定轉速下電感參數在線辨識誤差分析Fig.3 Estimation analysis of the inductances at rated speed
3.3 仿真結果
圖4 顯示的是在PI 控制器中加入前饋措施后,與無前饋q 軸電感參數辨識過程對比。由圖4 可知,當無前饋處理時,雖然穩態過程中其準確度一致,但是其動態性能不足,因此,在動態條件下無前饋處理時,參數辨識會出現誤差。

圖4 參數在線辨識仿真對比Fig.4 Simulation of the online estimation
4 電流解耦控制器設計
由表1 可知,隨著速度的升高,系統耦合電壓將在方程中占據越來越多的比重。因此電流解耦控制器的設計性能對要求恒功率范圍寬的IPMSM 控制系統尤為重要。本文所設計的電流解耦控制器由圖5a,5b 發展而來,圖5a是由Jinhwan Jung[16]提出的一種復合結構解耦控制器,這種解耦方法的設計模型不基于電機參數,具有很強的魯棒性,但是其解耦控制性能較差,其參考電壓方程為

式中

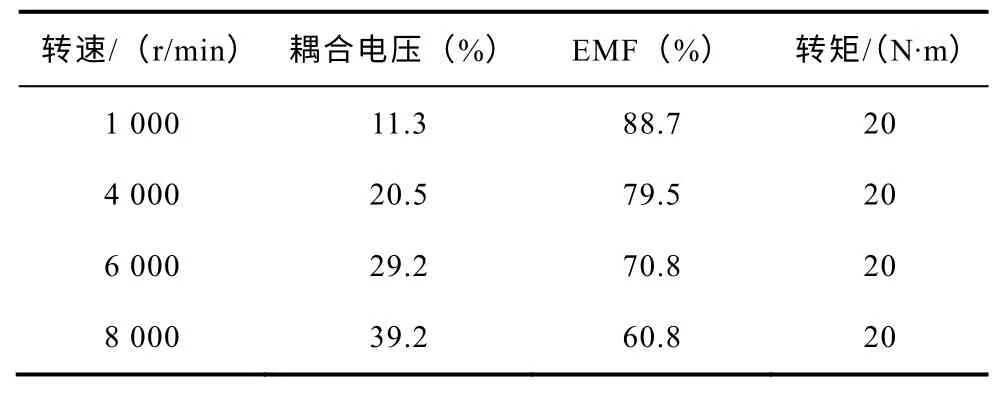
表1 轉速對應相對電壓值Tab.1 Voltage components versus speed
隨著微型處理器計算速度的發展,參數在線辨識越來越廣泛的應用到了IPMMS 電流解耦控制器中,Hyunbae Kim[17]利用參數辨識算法設計的控制器框圖如圖5b 所示,與圖5a相比,系統需要參數能夠精確的辨識,因此提高了電流解耦控制器的性能。其電壓給定方程為
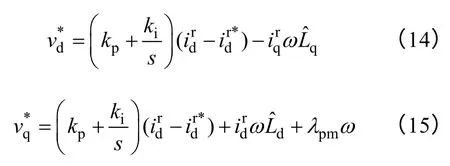
本文提出的改進型電流解耦控制器的控制框圖如圖5c 所示,添加了兩個PI 控制器來補償當轉矩輸出較大時,電阻上壓降變化對電感參數辨識帶來的影響,更進一步利用前饋來改進電流解耦控制器的性能,其電壓給定方程為


圖5 電流解耦控制器框圖Fig.5 Block diagram of the current decoupling controller
電流解耦控制器的設計基于參數辨識,因此電感參數辨識所出現的誤差也必須進行考慮,系統的傳遞函數應考慮參數辨識的誤差,根據設計的系統框圖,圖5c 可得出所設計的電流解耦控制器的傳遞函數為
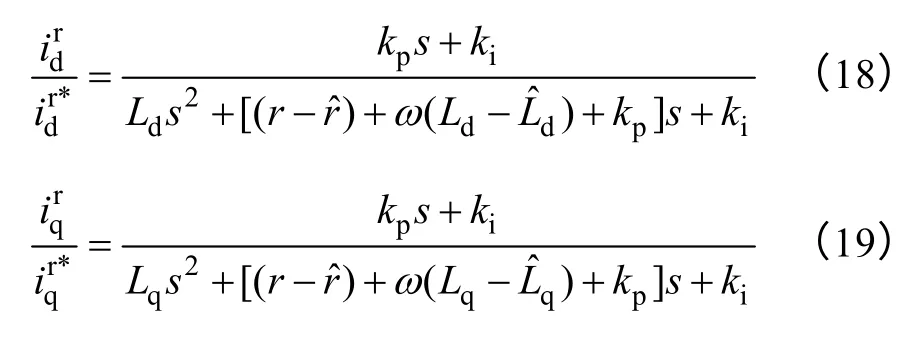
IPMSM 控制系統中,解耦控制器的幅頻響應特性是檢驗控制器性能的一個重要指標,圖5 顯示的是在同步坐標系中,電流解耦控制器的頻域響應軌跡,對比了電流解耦控制器與非解耦控制器,傳統型解耦控制器與改進型解耦控制器的頻域響應,對比了兩種電流解耦控制器當參數辨識出現誤差時各自的頻域響應。考慮樣機的轉速范圍,分析時設定中心頻率為600Hz,由圖6a 可以看出,對于傳統型解耦控制器,當電感參數能夠精確辨識時,電流控制器的幅頻響應特性平穩,衰減速度較慢,即使在參數不能精確辨識的情況下,控制器的增益也能保持較好特性,但與準確參數模型下的幅頻響應對比,會出現增益下降現象,而非解耦控制器其幅頻特性則明顯較差,有超調現象,并且在整個頻率范圍內衰減較快。從圖6b 可以看出,改進型電流解耦控制器進一步改善了由于參數辨識誤差引起的增益下降現象,由幅頻響應曲線可知,系統在整個頻率區間內都具有良好的幅頻響應特性,由于參數辨識引起的誤差對其頻域特性幾乎沒有影響。

圖6 電流解耦控制器幅頻應響曲線Fig.6 Frequency responsecurve of the current decoupling controller
5 實驗
本文分別通過仿真和實驗驗證了基于參數在線辨識的電流解耦控制器性能。利用TI 公司DSP 芯片TMS28335為處理器,制作了50kW 樣機的控制器,樣機參數見表2。實驗系統平臺如圖7 所示。系統中電流電壓采樣頻率為20kHz,采用CAN 總線向上位機發送電流,電壓及速度信號,為保證數據的實時性,CAN 總線傳輸速率選擇1Mbps,實驗波形數據由dSpace 提供。系統采用的控制框圖如圖8所示。
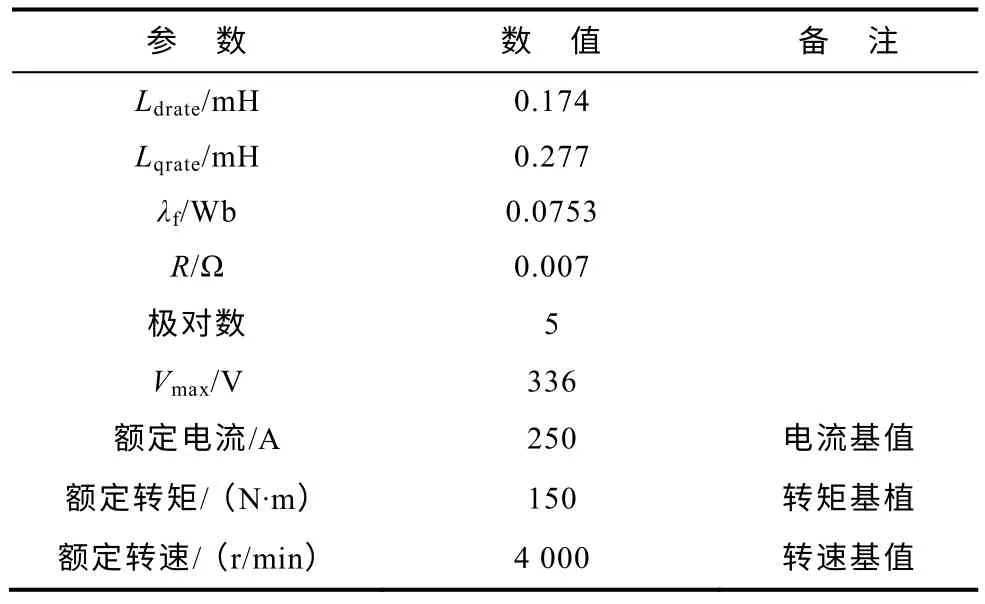
表2 IPMSM 樣機參數Tab.2 Parameters of the test IPMSM

圖7 內嵌式永磁同步電機實驗平臺Fig.7 Experimental setup of the IPMSM drive

圖8 系統控制框圖Fig.8 Block diagram of the proposed control system
在仿真模型中,設定電感參數以方波形式發生變化,由圖4 可以看出,當電感在類似方波極端變化條件下,所提算法在d-q 軸電感辨識中仍有很好的動態性能和靜態性能,能快速穩定地跟蹤電感參數。圖9 所示的是電感參數離線實驗測量及在線參數辨識的對比,其結果顯示,在整個電流范圍內,所提方法能準確的辨識d-q 軸電感。
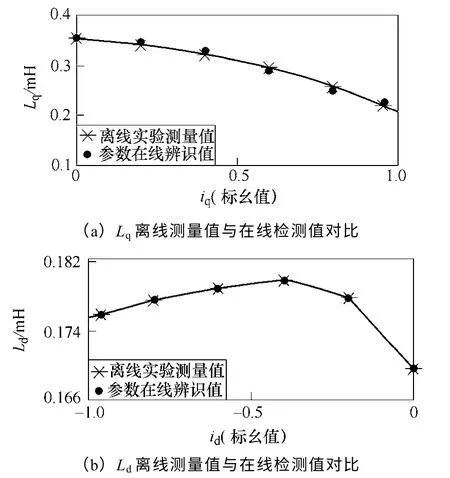
圖9 電感離線測量值與在線檢測值對比Fig.9 Comparison of the inductance for on-line parameters estimation and off-line scheme
圖10a是樣機帶載25N,給定速度為額定轉速4 000r/m 時,電機的起動過程,在第3s 時,系統負載突變至65N。由圖10a 可以看出,系統轉速平穩,能準確跟蹤給定指令,且無超調現象,即使在第3s負載突變的情況下,系統能迅速的穩定速度,沒有速度擾動現象,由圖10b 可以看出系統轉矩輸出穩定脈動小。由圖10c 和圖10d 可以看出,隨著d-q 軸電流的變化,系統能準確辨識出當前電阻值,其中Lq變化范圍較大,Ld變化范圍較小。從圖10e 可以看出,在恒功率區,轉速為7 000r/min 時,系統仍然沒有出現超調現象,且在負載突變情況下速度保持平穩。圖10f 給出了未采用解耦控制時帶載40N,給定速4 000r/min 時的速度曲線,與圖10a 及10b對比可以看出未采用電流解耦控制時,其速度曲線出現超調現象,且加速及穩定過程中轉矩脈動現象較為明顯。
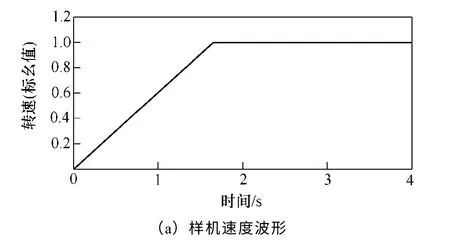

圖10 樣機實驗波形Fig.10 Experimental response of the proposed scheme for the test IPMSM
6 結論
本文在傳統的模型參考自適應的基礎上,改進了參數在線辨識的前饋及反饋性能,對兩種辨識策略做出了仿真對比,并通過離線實驗測量證明了此種方法的正確性,基于此種參數在線辨識策略,設計了一種應用于IPMSM 系統的改進型電流解耦控制器。經實驗證明,此種電流解耦控制器應用于IPMSM 系統時,具有優異的調速性能,且加速過程平穩,無超調現象,在負載突變的情況下速度能迅速平穩,無擾動現象。本文所提控制策略適合應用于永磁磁鏈較穩定,但電感參數變化較大的IPMSM系統,此種控制方式算法簡單,易于實現,魯棒性強,同時具有良好的動態性能。
[1]Morimoto S,Sanada M.Wide-speed operation of interior permanent magnet synchronous motors with highperformance current regulator[J].IEEE Transactions on Industry Applications,1994,30(4):920-926.
[2]Yu Seok,Jun Young Lee.Adaptive flux observer with on-line inductance estimation of an interior PMSM considering magnetic saturation[J].Journal of Power Electronics,2009,9(2):188-197.
[3]Cheng B,Tesch T R.Torque feed forward control technique forpermanent-magnet synchronous motors[J].IEEE Transactions on Industrial Electronics,2010,57(3):969-974.
[4]Underwood,S J Husain I.Online parameter estimation and adaptive control of permanent magnet synchronous machines[J].IEEE Transactions on Industrial Electronics,2010,57(7):2435-2443.
[5]Rahman M A,Milasi R M,Lucas C.Implementation of emotional controller for interior permanent-magnet synchronous motor drive[J].IEEE Transactions on Industry Applications,2008,44(5):1466-1476.
[6]Jinhwan Jung,Kwanghee Nam.A dynamic decoupling control scheme for high speed operation of induction motors[J].IEEE Transactions on Industrial Electronics,2002,46(1):100-110.
[7]Huangyuan Wu,Shuanghong Wang,C L Gu.Simplified fuzzy logic based flux weakening speed control of IPMSM drive[C].Proceedings of IEEE Conference on Electrical Machines and Systems,Beijing,China,2011.
[8]Yukinori Inoue,Koji Yamada,Shigeo Morimoto,et al.Accuracy improvement of IPMSM sensorless drives with on-line parameter identification[C].Power Conversion Conference,Nagoya,Japan,2007:860-866.
[9]Sugimoto H,Tamai S.Secondary resistance identification of an induction-motor applied model reference adaptive system and its characteristics[J].IEEE Transaction on Industry Applications,1987,23(2):296-303.
[10]Rajendra,Shrestha L,Seok Jul Ki.Online compensation of parameter variation effects for robust interior PM synchronous motor drives[J].Journal of Power Electronics,2011,5(11):713-718.
[11]Reyes M Velez,Verghese G C.Subset selection in identification,and application to speed and parameter estimation for induction machines[C].Proceedings of IEEE Conference on Control Applications,Albany NY,1995:991-997.
[12]Kwon T S,Sul S K.Novel antiwindup of a current regulator of asurface-mounted permanent-magnet motor for flux-weakening control[J].IEEE Transactions on Industrial Electronics,2006,42(5):1293-1300.
[13]Dutta R,Rahman M F.A comparative analysis of two test methods of measuring dq-axes inductances of interior permanent magnet machine[J].IEEE Transactions on Magnetics,2006,42(11):3712-3718.
[14]Cheol Jo,Ji Yun Seol,In Joong Ha.Flux-weakening control of IPM motors with significant effect of magnetic saturation and stator resistance[J].IEEE Transactions on Industrial Electronics,2008,55(3):1330-1340.
[15]Jinhwan Jung,Sunkyoung Lim,Kwanghee Nan.PI type decoupling control scheme for high speed operation of induction motors[C].28th Annual IEEE Power Electronics Specialists Conference,St.Louis,America,1997:1082-1085.
[16]Kim H,Lorenz R D.Improved current regulators for IPM machine drives using on-line parameter estimation[C].IEEE IAS Annual Meeting,Pittsburgh,PA,USA,2002:86-91.
[17]楊書生,鐘宜生.永磁同步電機轉速伺服系統魯棒控制器設計[J].中國電機工程學報,2009,29(3):84-90.Yang Shusheng,Zhong Yisheng.Robust controller design for PMSM speed servo systems[J].Proceedings of the CSEE,2009,29(3):84-90.
[18]尹華杰,林金銘,金振榮.弱磁型永磁同步電機參數與調速特性的關系研究[J].電工技術學報,1997,12(1):24-28.Yin Huajie,Lin Jinming,Jin Zhenrong.Effects of parameters on variable speed characteristic of permanent magnet synchronous machine for flux weakening operation[J].Transactions of China Electrotechnical Society,1997,12(1):24-28.
[19]安群濤,孫力,趙克.一種永磁同步電機參數的自適應在線辨識方法[J].電工技術學報,2008,23(6):31-36.An Quntao,Sun Li,Zhao Ke,An adaptive on line identification method for the parameters of permanent maget synchronous motor[J].Transactions of China Electrotechnical Society,2008,23(6):31-36.
[20]許家群,朱建光,刑偉,等.電動汽車驅動用永磁同步電動機系統效率優化控制研究[J].電工技術學報,2004,19(7):81-86.Xu Jiaqun,Zhu Jianguang,Xing Wei,et al.Study of efficiency optimization control of permanent magnet synchronous motor drives for electric vehicle[J].Transactions of China Electrotechnical Society,2004,19(7):81-86.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32