基于MC56F8346控制器的塞拉門控器研究
2015-11-29 10:43:13仇維斌黃巧亮歐紅香
機電設備 2015年1期
關鍵詞:設計
仇維斌,嚴 巖,黃巧亮,歐紅香
(1. 今創集團股份有限公司,江蘇 常州,213102;2. 江蘇科技大學,江蘇 鎮江,212003;3. 常州大學,江蘇 州,213164)
基于MC56F8346控制器的塞拉門控器研究
仇維斌1,嚴 巖2,黃巧亮2,歐紅香3
(1. 今創集團股份有限公司,江蘇 常州,213102;2. 江蘇科技大學,江蘇 鎮江,212003;3. 常州大學,江蘇 州,213164)
介紹了一種基于MC56F8346控制器的高速列車塞拉門控器的設計。其控制器采用速度、電流雙閉環方式實現對無刷直流電機的控制,速度調節器和電流調節器均采用PI控制器控制,設計中分別運用了安全繼電器及狀態機來增加塞拉門運行的安全性和可靠性。給出了硬件框圖以及軟件控制算法。試驗結果表明,所設計的高速列車塞拉門控制器能滿足系統要求。
MC56F8346;安全繼電器;DCU
0 引言
高速列車塞拉門是乘客上下旅客列車的通道,因其數量較多、操作頻繁而成為高速列車上至關重要的部件,要求其必須安全可靠。塞拉門控制系統主要由司機室主控屏、門控器(Door Control Unit,簡稱DCU)、執行電機、輸入輸出模塊、聲光報警裝置和現場總線網絡等構成,并與列車控制和管理系統(Train Control and Management System,簡稱TCMS)進行數據通訊,完成對列車車門的實時控制與監視[1-3]。
DCU作為高速列車塞拉門控制系統的一個主要部件,擔負著接收來自司機室的控制命令、驅動電機執行開關門動作、通過總線網絡反饋門狀態信息等任務。因此,它的可靠性將極大地決定整個塞拉門控制系統的可靠性和安全性。研究在硬件架構及軟件算法的設計方面充分考慮了DCU運行的可靠性、安全性。同時為了滿足高速列車運行的復雜干擾環境,充分考慮了產品的電磁兼容性[4]。
1 系統功能
作為塞拉門控制系統的核心部件,DCU具有以下主要功能:
1)接收來自司機室的控制命令;開門、關門時間在3s~7s范圍內可調;開門、關門無故障使用次數不少于50萬次;執行開關門動作時,DCU能按照事先存儲的速度曲線進行動作。
2)采集門狀態信息及各種故障信息并通過MVB(Multifunction Vehicle Bus)總線發送至司機室控制屏,以方便司機直觀了解門狀態及故障信息[2]。
3)通過DCU內設置的數據通信接口,在線或離線調整系統參數。
4)進行門寬測定,并儲存電機速度曲線、電流曲線以及門寬等參數。
5)通過時間/位移、敏感膠條、電流三種方法進行障礙物檢測,并可根據實際情況適當調整重新開關門延遲時間和開關門次數等參數。6)具有系統自診斷能力。
2 系統硬件設計
為了滿足高性能、模塊化的要求,DCU的硬件設計采用雙處理器模式,即DCU內部包含兩塊獨立的控制單元,分別是邏輯控制單元和驅動控制單元,二者通過通訊線聯系,達到無縫對接;同時為了滿足高度安全、高度可靠的要求,DCU硬件設計時巧妙運用安全繼電器;此外,本設計還采用CAN通信實現同一節車廂內DCU之間信息共享。
2.1 飛思卡爾MC56F8346處理芯片簡介
飛思卡爾芯片以可靠性及抗干擾性著稱,這一特點使其被廣泛運用于工業控制、汽車電子、醫療器械等領域。MC56F8346是飛思卡爾公司推出的一款同時具備數字信號(DSP)處理能力和微控功能的芯片。它具有以下功能[5]:
1)處理速度達到60 MIPS,具有良好的數字處理能力和微控制器功能。
2)2個16位的PWM(脈寬調制)通道。全硬件控制的PWM輸出足以滿足無刷直流電機高精度、高可靠性的控制要求。
3)高性能ADC通道,提供多達16路的模擬輸入,非常適合無刷直流電機伺服控制中的電流環控制。
4)內部集成的同步串行接口SPI、異步串行通信接口SCI以及CAN通訊模塊,能夠很好地滿足DCU與司機室以及DCU彼此之間的通信[4]。
5)電機驅動的外部保護中斷,能夠滿足DCU對電機控制安全性的要求。
6)內部集成的正交編碼脈沖測速電路,能夠減小采樣誤差,顯著改善電機控制效果。
由于DCU是在復雜干擾環境下應用的一種需要高度安全、高度可靠的部件,所以采用MC56F8346作為控制器的核心單元無論在控制精度還是可靠性方面都能得到保證。
2.2 邏輯控制單元硬件設計
邏輯控制單元以MC56F8346芯片為核心部件,集成SCI、CAN、數字IO、ADC、QEP等功能,并外擴RAM、ROM等資源。該部分的硬件框圖如圖1所示。
邏輯控制單元完成對系統狀態變量的采集、開關門邏輯分析、故障報警及記錄的處理;進行運動規劃并將生成的運動指令傳給驅動板;通過MVB和RS485模塊分別與TCMS、便攜式測試設備(Portable Test Equipment,簡稱PTE)進行通訊,完成參數設置下載以及數據顯示等功能;通過CAN總線實現與本節車廂內其余3個DCU之間的通訊。
2.3 驅動控制單元硬件設計
驅動控制單元以MC56F8346控制器為核心部件,主要負責無刷直流電機的運動控制;接收邏輯板發過來的指令信號完成電機運動狀態切換。驅動控制單元內部具有過流、過壓、欠壓等保護。該部分的硬件框圖如圖2所示。
為了提高系統集成度及可靠性,研究采用了智能功率模塊IPM PS21563,該IPM和外圍的泵升供電電路構成直/交流轉換電路逆變器,通過六個開關管的導通和關斷將直流電壓轉換成脈沖輸出,連接到電機的三相繞組來控制電機。此外該模塊與控制器的外部中斷接口連接,在出現異常情況時,可立即通過中斷接口關斷MC56F8346所有6路脈寬調制PWM波輸出。這些特點使它非常適合無刷直流電機高可靠性的伺服控制。
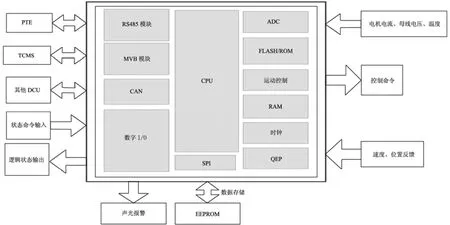
圖1 邏輯控制單元硬件框圖
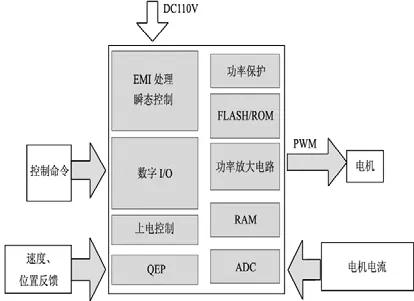
圖2 驅動控制單元硬件框圖
通過光電編碼器檢測無刷直流電機的速度,反饋脈沖接入MC56F8346芯片的QEP電路[6]。
通過VSM025A電壓霍爾傳感器檢測電機母線電壓,電壓反饋接入MC56F8346芯片的A/D轉換電路,實現對電機母線電壓的實時監控。
通過CSM015LX電流霍爾傳感器檢測電機電樞電流,電流反饋接入MC56F8346芯片的A/D轉換電路,轉化成數字量參與電流環運算[7]。
2.4 安全繼電器驅動電路硬件設計
安全繼電器位于DCU內部,有兩對無源觸點輸出,其中一對常開觸點與DCU解鎖指令信號串聯,另一對常閉觸點串聯在列車安全回路中。當安全繼電器被激活,常開觸點閉合,DCU解鎖指令可以輸出;常閉觸點斷開,列車安全回路斷開;當安全繼電器未激活時,常開觸點斷開,DCU解鎖指令輸出無效,常閉觸點閉合,列車安全回路閉合。此設計不但避免了列車運行時,車門因DCU誤動作而打開,而且保證了只有在車門都關閉的情況下,列車才能啟動,極大地提高了列車運行的安全性。考慮到硬線信號的可靠性,本設計采用硬件電路來實現安全繼電器的激活與去激活。安全繼電器驅動電路硬件原理圖如圖3所示。
3 系統軟件設計
DCU的硬件設計采用了雙處理器技術,軟件分為兩部分,即邏輯控制單元部分和驅動控制單元部分。其中邏輯控制單元主要完成對系統狀態變量的采集、開關門邏輯分析、故障報警及記錄的處理;進行運動規劃并將生成的運動指令傳給驅動板;負責與TCMS、PTE、本節車廂內DCU的通訊以及與驅動控制單元的內部聯系。而驅動控制單元主要負責無刷直流電機的伺服控制;對電機電樞電流、電壓、溫度的監測,實現對電機的過流、過壓、欠壓等保護。
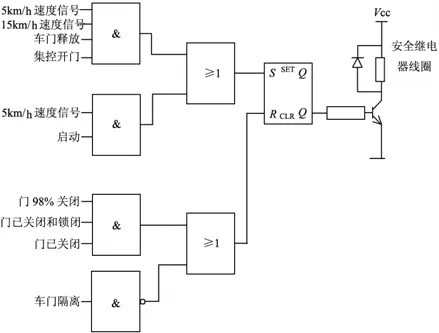
圖3 安全繼電器驅動電路硬件原理圖
3.1 邏輯控制單元的門狀態及有限狀態機設計
在邏輯控制單元軟件設計中,根據門的運動狀態設定了狀態機變量,見表1。
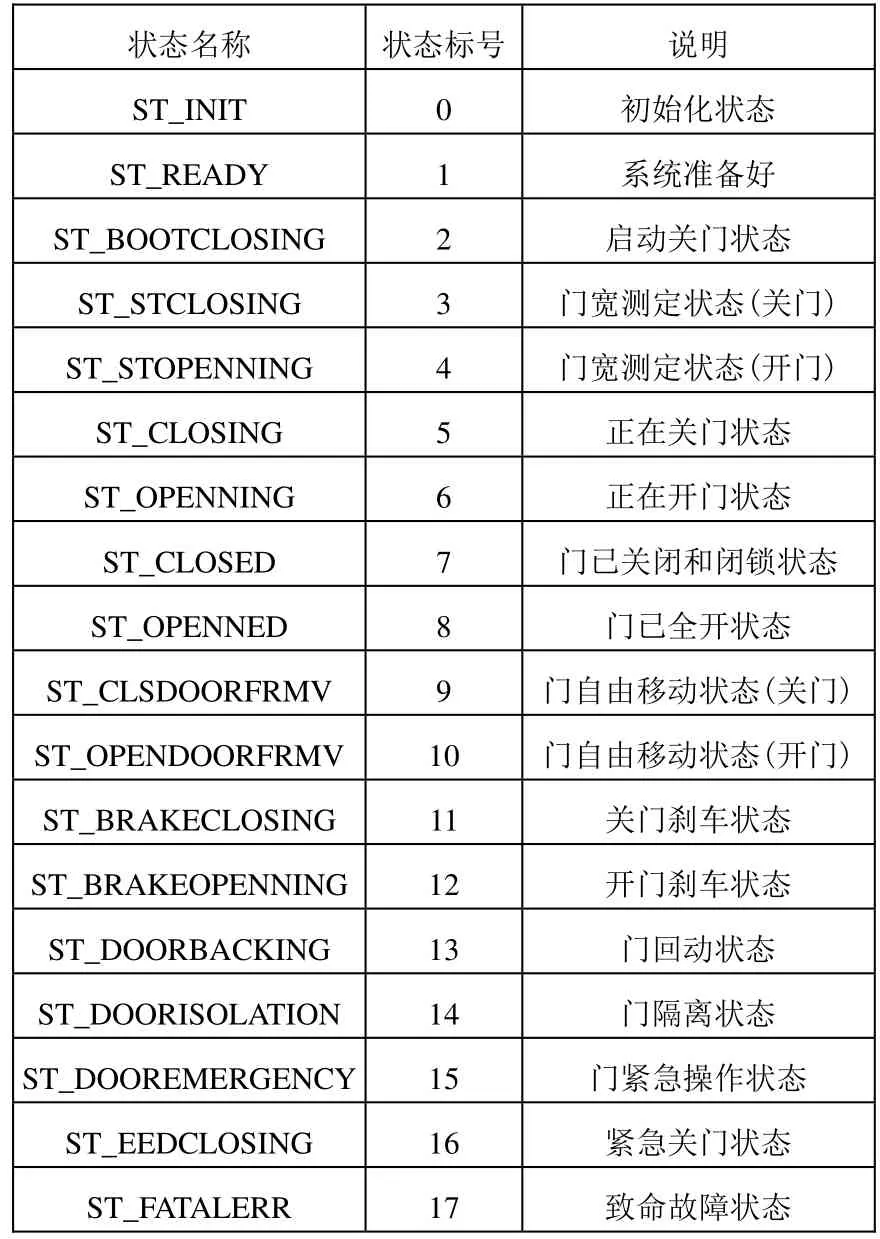
表1 狀態機變量
圖 4提供了用于邏輯控制單元開關門完整的有限狀態機。系統在每個狀態中,不斷判斷轉移條件,若轉移條件為真,則狀態改變。
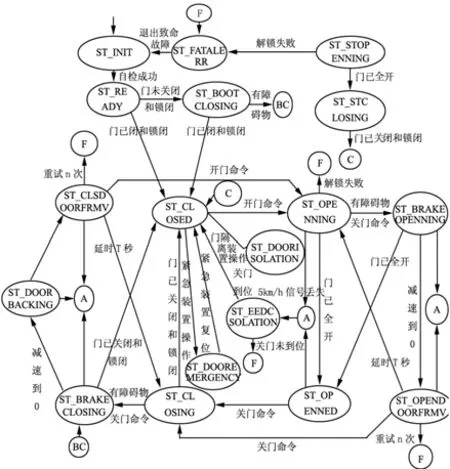
圖4 邏輯控制單元有限狀態機切換圖
3.2 邏輯控制單元軟件設計
邏輯控制單元軟件由多個任務和數據緩沖池構成,任務分為高優先級任務、低優先級任務、中斷任務和空閑任務。系統設置2ms時鐘中斷。高優先級任務每2ms執行1次,10個任務依次循環執行,20ms完成一次循環。低優先級任務每20ms執行1個,120ms完成一次循環。此外,還不定時的執行空閑任務和中斷任務。時間片分配及邏輯控制單元流程圖如圖5所示[8]。
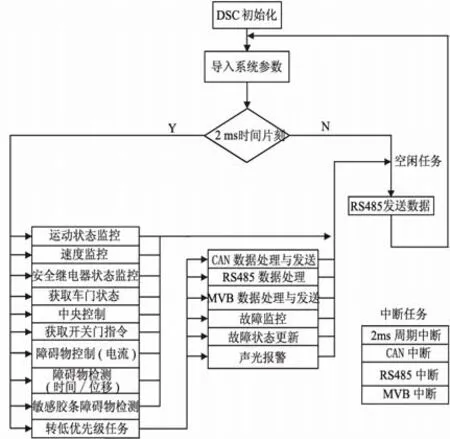
圖5 邏輯控制單元程序框圖
空閑任務在高優先級任務和低優先級任務所占時間片中的空閑時間內執行。包括RS485總線數據發送。
中斷任務包括CAN總線接收中斷、RS485總線接收中斷、MVB總線接收中斷,定時器中斷。
3.3 驅動控制單元軟件設計
為了滿足塞拉門開關過程中對平穩度的要求,設計采用雙閉環方式對電機進行控制,即以速度外環和電流內環通過級聯方式構成,速度外環的輸出作為電流內環的輸入。無刷直流電機調速雙閉環控制框圖如圖6所示。
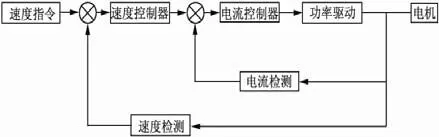
圖6 電機控制原理框圖
控制算法采用增量式數字PI算法。考慮到PI算法的積分環節會出現積分飽和,而一旦發生積分飽和,將會使系統產生很大的超調量。為此,本設計中的速度環和電流環均采用積分飽和限幅以及積分分離的控制算法。電機控制程序流程圖如圖7所示。其中,速度環控制周期為1ms,電流環控制為0.2ms。PWM頻率為15kHz,電流采樣在PWM周期到時啟動,電機控制在PWM中斷中完成。速度環控制包括:速度獲取、速度環PI控制、積分分離及積分限幅、換相檢測。電流環控制包括:電流檢測、電流環PI控制、積分分離及積分飽和限幅、PWM輸出限幅等。
4 結語
本文介紹了一種高速列車塞拉門控器的設計。目前,該產品已順利通過功能試驗、絕緣耐壓試驗、環境溫度試驗、沖擊振動試驗、EMC試驗、以及 50萬次耐久性試驗。結果表明,該產品能夠很好地滿足高速列車運行的各種要求。
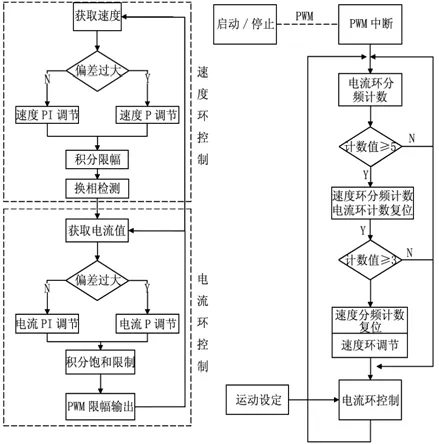
圖7 電機控制程序流程圖
[1] 朱書娟, 徐剛, 陳勇勝, 等. 淺談高速動車組車門通信系統[J]. 中國科技博覽, 2013 (24): 464-464.
[2] 朱琴躍, 謝維達, 譚喜堂. MVB 協議一致性測試研究與實現[J]. 鐵道學報, 2007, 29(4): 115-120.
[3] 關和寧. 城軌車輛列車監控系統的設計及應用[D].北京: 北京交通大學研究生院, 2008.
[4] 陳倩. 地鐵車輛客室塞拉門運動仿真及安裝工藝分析[D]. 成都:西南交通大學研究生院, 2012.
[5] 劉和平, 鄭群英, 嚴利平, 等. 數字信號控制器原理及應用[M]. 北京: 科學出版社, 2011.
[6] 陳濤. 基于DSP的無刷直流電機控制系統研究與實現[D]. 桂林:桂林電子科技大學研究生院,2010.
[7] 周廣銘. 基于DSP的無刷直流電機控制系統設計[D]. 大連: 大連理工大學研究生院,2008.
[8] 仇維斌, 歐紅香. 一種基于 TMS320LF2407A 的地鐵屏蔽門門機控制器設計[J]. 微電機, 2009,42(9): 37-39.
Study on Sliding Plug Door Control Unit Based on MC56F8346 Controller
QIU Wei-bin1, YAN Yan2, HUANG Qiao-liang2, OU Hong-xiang3
(1. KTK Group Co., Ltd., Changzhou 213102, China; 2. Jiangsu University of Science and Technology, Zhenjiang 212003, China; 3. Changzhou University, Changzhou 213164, China)
The design of a sliding plug door control unit for high speed train based on MC56F8346 controller is introduced. Brushless DC motor is controlled by using speed and current double closed loop mode in the controller, and the speed regulator and current regulator are controlled by PI controller.The safety relay and state machine are adopted separately in design to increase safety and reliability of sliding plug door moving. The hardware block diagram and software control algorithm are given. The test results indicate that the design of the plug door controller for high speed train can meet the system requirements.
MC56F8346;safety relay;DCU(Door Control Unit)
TP23
A
10.16443/j.cnki.31-1420.2015.01.002
仇維斌(1972-),男,高級工程師,碩士。主要研究方向為電力電子變流技術及傳動控制。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04