基于PVDF的微力傳感器設計
2015-12-02 01:41:50馬超哲杜勁松劉意楊
制造業自動化 2015年7期
馬超哲,杜勁松,劉意楊
MA Chao-zhe1,2 , DU Jin-song1 , LIU Yi-yang1
(1.中國科學院沈陽自動化研究所,沈陽 110016;2.中國科學院大學,北京 100049)
0 引言
微機電系統(Micro Electric Mechanical System,MEMS)作為21世紀的前沿技術,正快速發展成為一個集微型機械、微傳感器、微控制器、微執行器、信號處理和智能控制于一體的新興研究領域。MEMS具有可在狹小空間內進行作業而又不擾亂工作環境和對象的特點,故其應用十分廣泛,涉及航空航天、軍事、生物醫學工程、太空探險和深海探查等諸多領域,一旦技術成熟并形成產業化必將對國民經濟建設、國防建設乃至社會發展產生深遠的影響。
目前自動化裝配領域還未研制出快速和低成本的裝配MEMS設備。主要原因是微測量中許多結構是脆弱和易破碎的,通常在微牛頓的范圍內就會破碎。生物醫學領域[1~3]的生物力學研究、單細胞操作,航空航天領域[4,5]的微加工/微操作等方面的研究都存在微尺度環境下這種微小力測量的難題。雖然微裝配中作用力已經可以達到微牛力范圍,但是現有的大多數傳感器并不能對其進行可靠的測量,如應力計、壓阻效應、壓磁效應和電容傳感器的分辨力都在mN或mN以下。盡管光學技術在nN范圍有很高的分辨力,但是光學技術操作的對象是MEMS無法操作的納米量級的微觀物體[6]。此外還有一些光學技術設備的費用十分昂貴[7]。因此目前針對微牛范圍的部件裝配存在很大的困難,裝配成功率低,時間長,費用昂貴,仍需要進一步的研究。
本文的目標是設計基于PVDF的微力傳感器,使其能夠提供高精度、高可靠性的微小力測量。首先基于壓電效應和材料力學中懸臂梁結構,開發出了一種傳感器模型。其次設計了一個信號調理電路把電荷量轉換為電壓量,最后進行實驗驗證。
1 壓電效應和PVDF懸臂梁模型
1.1 壓電效應
壓電效應是指某些電介質在沿一定方向上受到外力的作用發生形變時,其內部會產生極化現象,在它的兩個相對表面上會出現正負相反的電荷。當外力去掉后,該電介質又會恢復到不帶電的狀態,電介質受力所產生的電荷量與外力的大小成正比。圖1是電介質在未受力、受到拉伸外力以及受到壓縮外力這三種情況下其內部電荷的狀態。
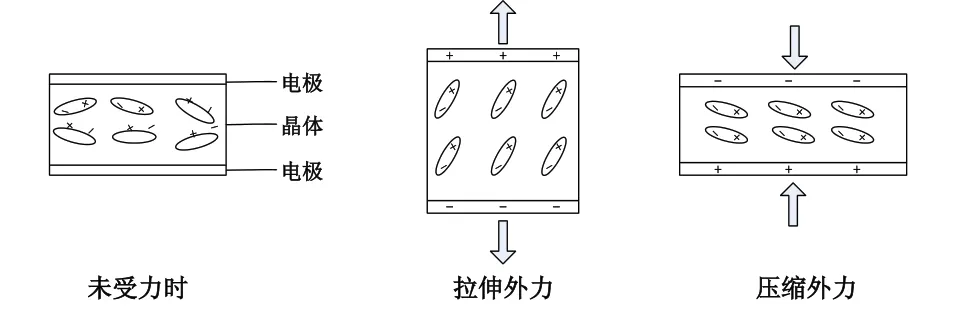
圖1 壓電效應原理示意圖
1.2 PVDF懸臂梁模型
在實際的操作中,傳感器會與探針連接并裝備到機械臂上,這樣PVDF的模型結構與材料力學中的懸臂梁結構基本相同。在此基礎上設計的PVDF懸臂梁模型如圖2所示。圖中,L為PVDF的長度;W為PVDF的寬度;H為PVDF的厚度;AL×W為PVDF的表面積;AW×H為PVDF的截面面積;d31為PVDF的壓電常數;LP為探針的長度。
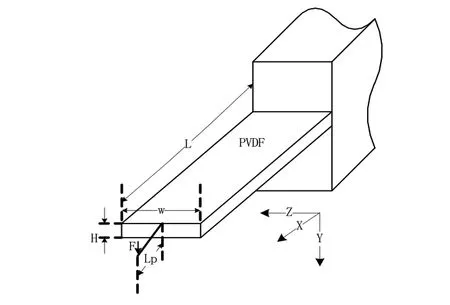
圖2 PVDF傳感器懸臂梁模型
根據上一節中的壓電效應,PVDF傳感器表面產生相同的正負電荷數量,電荷數Q可表示為:

ε為PVDF薄膜表面的張力,表示如下:

為PVDF薄膜內任意一點的張力:

是PVDF薄膜慣性力矩:
M為PVDF薄膜彎曲力矩:

綜合式(1)~式(5),可將公式(1)寫成:

由式(6)可以看出PVDF產生的電荷Q與PVDF薄膜所受的力F成線性關系。
由于PVDF產生的電荷很少且為亞pc量級,使得電荷難以直接測量,為此設計了一種信號調理電路來將電荷量轉換為電壓量。
2 信號調理電路的設計
本文所設計的信號調理電路基于以下原理進行設計:當PVDF薄膜發生形變或受到應力作用時,在極化方向上產生的電荷量是極少的,基本上只有幾十或幾百pc(pico-charge)左右,因此首先需要設計一個電荷放大器,它不僅要把電荷信號轉化為電壓信號,而且還要對原始的電荷信號進行放大處理。原始的電荷信號只有經過電荷放大電路的放大和轉化后,才能進一步地放大、去噪、傳輸或采集。同時在電荷放大器之后緊跟了一個電壓放大電路,對信號進行第一次放大。考慮到實際操作中最為嚴重的干擾是50Hz的工頻干擾,設計了一個陷波電路來對工頻干擾進行濾除。有用信號經過前面放大電路得到了放大,而噪聲也同樣被放大了,由于傳感器要在靜態、準靜態或者是低頻下使用,故設計了一個低通濾波器,以濾除高頻噪聲。最后在經過后置的電壓放大器對有用信號再次進行適當的放大,以便數據采集卡進行信號的采集和計算機的處理。
信號調理電路原理如圖3所示,主要包括以下三部分的設計:電荷放大器設計,50Hz工頻陷波電路設計以及低通濾波器的設計。下面將對這三部分的進行介紹。
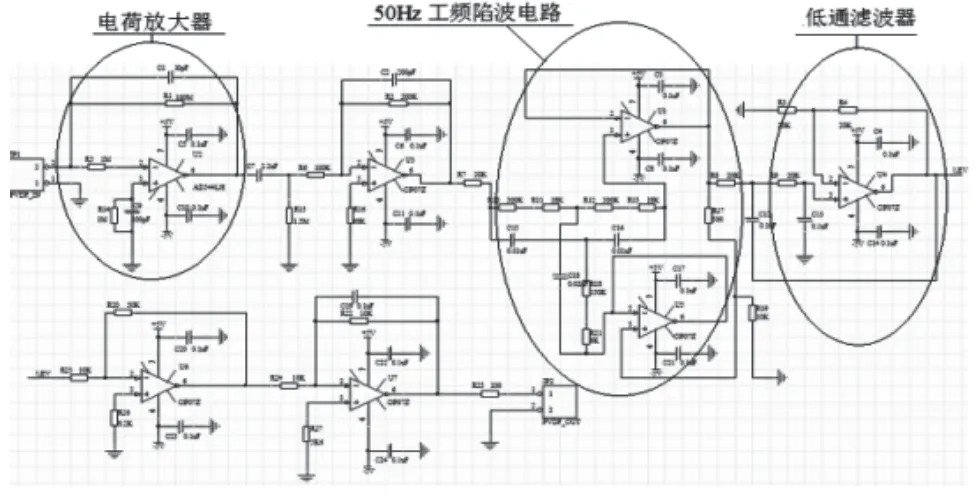
圖3 信號調理電路原理圖
2.1 電荷放大器
當PVDF壓電薄膜傳感器變形時,在電極表面就會出現電荷,且兩層電極表面聚集的電荷量相等,極性相反。可以把PVDF薄膜看作是一個自身帶有電容性質的靜電荷發生器。電荷放大器的等效電路如圖4所示。
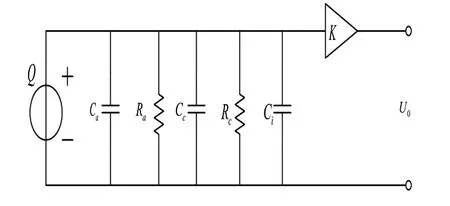
圖4 電荷放大器的等效電路
圖中Ca為PVDF的等效電容,Ra為PVDF的等效電阻,Cc和Rc分別為連接電纜的分布電容和絕緣電阻,Ci為運算放大器的輸入電容。
在實際操作中,由于作用的時間t很短且電流i(t)很小,根據電荷量的計算公式:

故PVDF產生的電荷極少,基本上在sub-pc量級。根據上面式(6)可知,施加在PVDF上的力也很小,為sub-μN級別。同時由于PVDF的內阻較大(約1012Ω),因此,電荷放大電路的主要作用有兩個方面:1)與PVDF傳感器阻抗匹配,把高阻抗輸入變為低阻抗輸出;2)將微弱電荷轉換成電壓信號并放大。
為了同時滿足以上兩點,選擇AD544來完成電荷放大器的設計。根據工作原理,電荷放大器的實際電路中采用負反饋。為使后級放大器不致因為輸入信號太大而飽和,選擇1000pF~10nF的電容提供負反饋。另外考慮到電容負反饋支路在直流工作時相當于開路,對電纜噪聲比較敏感,放大器零點漂移比較大。為了提高放大器的工作穩定性,在反饋電容的兩端并聯一個大電阻號(一般取108Ω~1012Ω)以提供直流反饋。
所設計的帶反饋的電荷放大電路的原理圖如圖5所示。
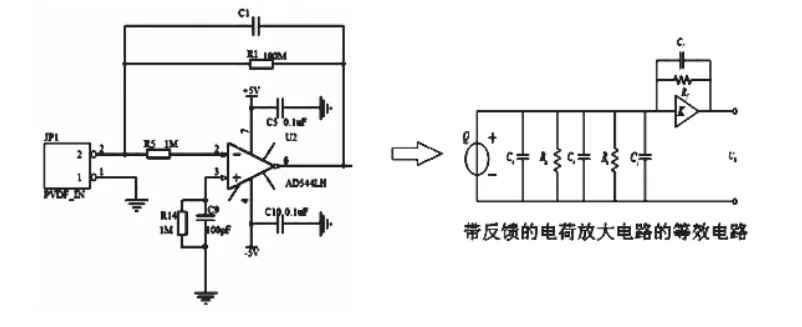
圖5 電荷放大器原理圖
2.2 50Hz工頻陷波電路
在實際的操作中最為嚴重的干擾是50Hz的工頻干擾。設計一個雙T有源陷波電路來濾除50Hz工頻干擾,原理圖如圖6所示。
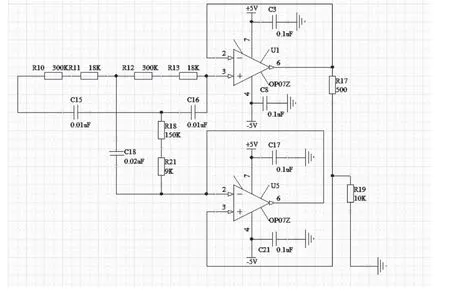
圖6 50Hz工頻陷波電路
在Multisim仿真軟件中選擇50Hz的正弦波作為輸入對上面的原理圖進行仿真,觀察到示波器輸出如圖7所示。從圖中可以看出,采用了陷波技術之后,測試信號經過陷波電路完全濾除了50Hz工頻干擾。
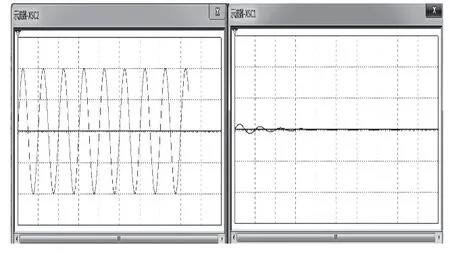
圖7 Multisim中的示波器輸出
2.3 低通濾波器
有用信號經過放大電路得到了放大,而噪聲也同樣被放大了。由于PVDF微力傳感器要在靜態、準靜態或者低頻下使用,設計中的二階有源低通濾波電路保障了高頻噪聲可以被有效的濾除。
圖8為Multisim中低通濾波器仿真結果,可以看出該低通濾波器能對高頻噪聲進行有效濾除。
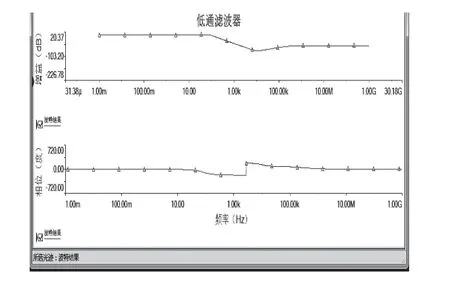
圖8 低通濾波器仿真結果
3 實驗結果
本文的目的在于設計sub-μN分辨力的傳感器,故選取的力的范圍在0-2.5μN之間。根據上面設計的信號調理電路,同時結合New Focus公司生產的,誤差為±2nm的3D運動平臺進行實驗,圖9為實驗示意圖。
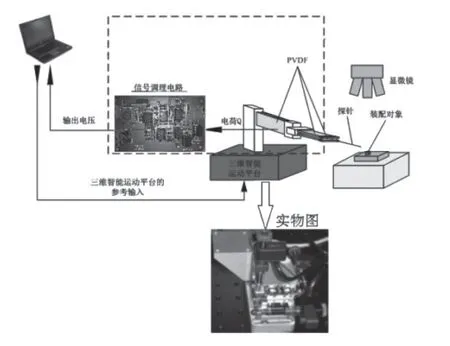
圖9 實驗示意圖
參考PVDF傳感器懸臂梁模型,選擇如下參數進行實驗L=0.025,W=0.008m,H=2×10-4m,d31=2.3×10-11C/NLP=0.005m,PVDF的楊氏模量E=2×109N/m2。實驗結果曲線如圖10所示。
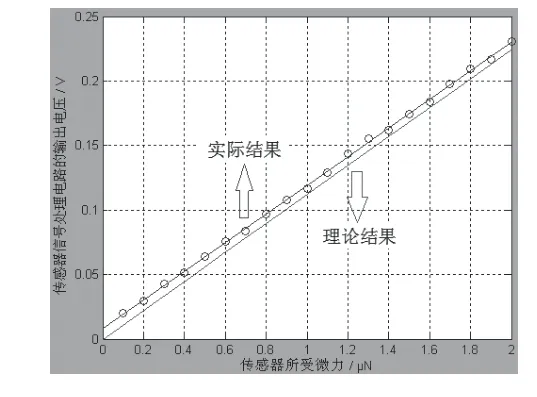
圖10 實驗結果和理論結果對比圖
上圖中理論曲線由以下公式計算得出:

其中K為信號調理電路的放大倍數,VOUT為信號調理電路輸出電壓。將微力傳感器的參數帶入上述式子化簡得到。實際曲線進行擬合的結果為VOUT=0.1112F+0.0091。
由圖中結果可以看出實際測量結果與理論結果非常接近,由此本文所設計的PVDF傳感器是合理的,傳感器的分辨力可以達到sub-μN級別。
4 結論
對PVDF懸梁臂模型和信號處理電路的設計,可以得出:1)根據PVDF懸臂梁模型,PVDF受力F與產生電荷Q的成線性關系;2)信號調理電路的設計解決了PVDF產生電荷難以直接測量的問題;3)實驗結果驗證了PVDF懸梁臂模型和信號處理電路的設計的正確性。
本文以基于PVDF的微力傳感器為研究對象,根據壓電效應和材料力學中懸臂梁結構,建立了PVDF傳感器懸臂梁模型。由于PVDF產生的電荷很少且為sub-pc量級,難以直接測量,故設計了一個信號調理電路來將電荷量轉換為電壓量。最后進行實驗驗證所設計的傳感器及信號調理電路的正確性。實驗結果表明,本文設計的PVDF傳感器分辨力可以達到sub-μN級別,從而為自動化生產過程中的批量制造和微裝配中微接觸力的反饋控制提供了理論上的解決方法。
[1]Arne Sieber,Pietro Valdastri,and Keith Houston etc.,A novel haptic platform for real time bilateral biomanipulation with a MEMS sensor for triaxial force feedback[J].Sensors and Actuators,2008,A142:19-27.
[2]B.B.Edin,L.Ascari,L.Beccai,and S.Roccella etc.,Bio-inspired sensorization of a biomechatronicrobot hand for the grasp-and-lift task[J].Brain Research Bulletin,2008,75:785-795.
[3]M.Ammi,and A.Ferreira,Biological cell injection visual and haptic interface[J].Adv.Rob.,2006,20(3):283-304.
[4]Gab-Soon Kim,Development of a three-axis gripper force sensor and theintelligent gripper using it[J].Sensors and Actuators,2007,A137:213-222.
[5]Ricardo P′erez,Nicolas Chaillet,and Krzysztof Domanski,Fabrication,modeling and integration of a silicon technology force sensor in a piezoelectricmicro-manipulator[J].Sensors and Actuators,2006,A128:367-375.
[6]龔鏨.納米光鑷系統的研制及微小力學量的測量[D].中國科學技術大學,2007.
[7]Emmanuelle Algre,Zhuang Xiong,Marc Faucher,Benjamin Walter etc.,MEMS Ring Resonators for Laserless AFM With Sub-nanoNewton Force Resolution[J].Journal of Microelectromechanical Systems,2012,21(2):385-397.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
