基于BP神經(jīng)網(wǎng)絡的船艦目標識別分類
2015-12-04 07:07:12梁錦雄王刻奇
艦船科學技術(shù) 2015年3期
梁錦雄,王刻奇
(1.廣州城市職業(yè)學院信息技術(shù)系,廣東 廣州510405;2.中山大學南方學院 電子通信與軟件工程系,廣東 廣州510970)
0 引 言
隨著國際社會在海洋領(lǐng)域的競爭日益激烈,我國艦船規(guī)模不斷擴大,例如兼?zhèn)涠喾N功能的海洋調(diào)查船、各種海軍戰(zhàn)艦[1-2]等。海上艦船目標的自動識別也隨之成為國內(nèi)外極為關(guān)注的焦點,艦船自動識別技術(shù)為準確跟蹤艦船目標、實現(xiàn)導彈精確制導等提供了重要保障,該技術(shù)可以說已成為海上作戰(zhàn)系統(tǒng)中不可或缺的部分。但艦船自動識別技術(shù)發(fā)展至今,還遠遠未達到廣泛普及的地步,因此船艦目標自動識別技術(shù)還有待進一步探索。BP神經(jīng)網(wǎng)絡模型是目前應用最為廣泛和取得成果最為突出的神經(jīng)網(wǎng)絡之一,這是一種并行的、復雜的、非線性的、動力學系統(tǒng),它可以表示極其復雜的非線性模型,對非確定規(guī)律性系統(tǒng)具有自適應特征[3],因此在各領(lǐng)域得到廣泛應用。
以往的船艦目標識別技術(shù)通常包括圖像預處理、船艦特征選擇、分類器設計3 大步驟。圖像預處理主要包括圖像降噪、目標增強、背景-目標分割等步驟。特征選擇是識別過程中較為重要的部分,常用的特征有顏色特征、紋理特征、尺寸特征等,不同的特征適用于不同的應用場合,但不管何種應用場景,選取的特征必須滿足以下3個條件:1)能使類間差異大,而類內(nèi)差異小;2)易于計算和存儲;3)魯棒性好,具有旋轉(zhuǎn)不變性、尺度不變性等優(yōu)良特性。分類器主要包括KNN、神經(jīng)網(wǎng)絡、SVM等,不同的分類器適用的場景也不相同。本文主要針對6 種船艦目標的紅外圖像進行分類,在對圖像進行預處理后,選取了Hu 不變矩、邊緣梯度方向直方圖、周長-面積比3個特征,利用4 層BP神經(jīng)網(wǎng)絡對6 種類別的船艦進行分類。
1 船艦圖像預處理
船艦紅外圖像的信噪比往往較低,隨機噪聲會嚴重干擾后續(xù)的圖像分割和特征提取。而傳統(tǒng)的中值濾波可處理紅外圖像中的隨機噪聲和椒鹽噪聲,其優(yōu)點就在于不僅執(zhí)行簡單,可有效去除噪聲,而且有保留圖像細節(jié)的能力,因此選用中值濾波對圖像進行降噪處理。
在中值濾波去噪的基礎(chǔ)上,利用OTSU法將圖像分割成背景和目標部分。OTSU法又稱大津法,該分割法以不同類之間的方差作為目標函數(shù),力求使不同類間的差異達到最大,而相同類間的差異達到最小,通過最大化目標函數(shù)的計算來尋找合適的圖像分割閾值,從而使錯分概率最小。由于該方法計算簡單,適用范圍廣,且能取得較好的分割結(jié)果,因此選用該分割法提取船艦目標。
2 特征描述
特征提取是船艦目標識別的關(guān)鍵部分。為有效識別船只類型,特征需滿足旋轉(zhuǎn)仿射不變性、運算量低等特點。本文選取Hu 不變矩、邊緣方向直方圖以及周長-面積比作為船艦識別的特征。
2.1 Hu 不變矩
Hu 矩具有諸多優(yōu)點,如不太受噪聲影響、可描述目標形狀輪廓等。f(x,y)的p+ q 階矩定義為:
mpq和f(x,y)都能被對方唯一確定。f(x,y)的p+ q 階中心矩定義為:

以下7個具有平移、旋轉(zhuǎn)和尺度不變性的矩即構(gòu)成Hu 矩,是由歸一化的二階和三階中心矩得到的:

2.2 邊緣梯度方向直方圖
圖像邊緣是圖像中灰度變化較大的部分,通常邊緣方向直方圖能很好地反映目標的形狀輪廓。利用x 方向和y 方向梯度算子計算圖像的水平和垂直梯度,圖1 給出了垂直和水平方向梯度模板。
圖1 垂直和水平方向梯度模板Fig.1 Vertical and horizontal template
在求出邊緣的水平梯度dx和垂直梯度dy 后,其梯度方向定義為:

式中:θ的取值為0 ≤θ ≤180 ,在實際統(tǒng)計過程中,需要對θ 進行量化,量化后累加出每個等級梯度方向的總個數(shù)。由于直接統(tǒng)計出的邊緣方向直方圖不僅受目標方向影響,且同一目標在不同尺度下的梯度方向直方圖也有差異,為了消除旋轉(zhuǎn)和尺度縮放對直方圖的影響,本文對方向直方圖做以下2 點處理:
1)使其具有尺度縮放不變性。為此,需對直方圖作歸一化處理:
式中:H(i)為直方圖;N 為邊緣像素總個數(shù)。
2)使其具有旋轉(zhuǎn)不變性。首先找出直方圖的最大值,然后將其循環(huán)右移至最右端。由于固定的將最大值右移至最右端,因此處理后的直方圖將不受目標旋轉(zhuǎn)的影響。
2.3 周長-面積比
艦船的面積定義為艦船區(qū)域的像素總個數(shù),雖然也可考慮用其他方法來計算艦船面積,但利用對像素計數(shù)的方法來求區(qū)域面積不僅最簡單,而且也是對原始模擬區(qū)域面積的無偏和一致的最好估計。
對于艦船周長的計算,首先使用8- 方向鏈碼對艦船的邊界進行編碼,然后將鏈碼進行右循環(huán)以使其構(gòu)成的自然數(shù)最小,從而達到鏈碼歸一化的目的,在周長計算時,規(guī)定鏈碼0,2,4,6方向的周長為1;1,3,5,7 方向的周長為,鏈碼中所有方向代表的周長相加即得艦船的總周長。
3 BP神經(jīng)網(wǎng)絡
3.1 BP 網(wǎng)絡結(jié)構(gòu)
由于BP 網(wǎng)絡各層隱含節(jié)點常用Sigmoidal 函數(shù)作為激活函數(shù),因此BP 網(wǎng)也稱為隱節(jié)點激活函數(shù)采用Sigmoidal 函數(shù)的多層感知器。根據(jù)實際應用不同,輸出節(jié)點的激活函數(shù)有不同選擇:若用BP 網(wǎng)絡進行分類,則輸出層節(jié)點激活函數(shù)一般采用Sigmoidal 函數(shù)或硬極限函數(shù);若利用BP神經(jīng)網(wǎng)絡進行函數(shù)逼近,則應使用線性函數(shù)作為激活函數(shù),圖2 給出了BP 網(wǎng)的網(wǎng)絡結(jié)構(gòu)。
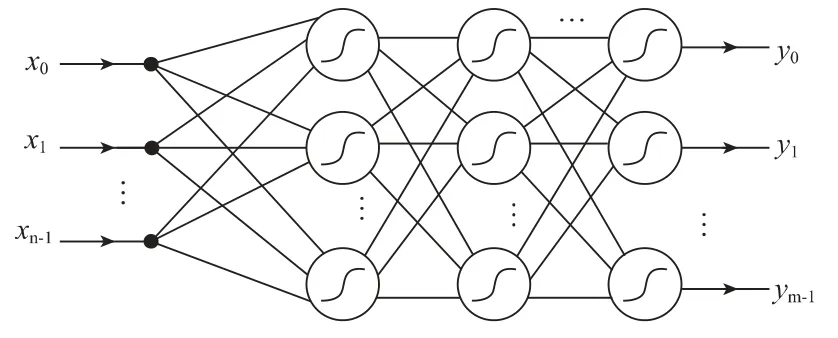
圖2 BP 網(wǎng)絡結(jié)構(gòu)Fig.2 Network structure of BP
對于BP 網(wǎng)中的各計算節(jié)點,有如下公式:

式中:f(·)為Sigmoidal 函數(shù);uj為每個節(jié)點的輸入;yj為每個節(jié)點的輸出。以4 層BP神經(jīng)網(wǎng)絡為例,假設其有n個輸入節(jié)點,則其輸入向量為x ∈Rn,第1 隱層共n1個神經(jīng)元,各節(jié)點相應的輸出為x′ ∈Rn1;第2 隱層共n2個神經(jīng)元,各節(jié)點對應的輸出為x″∈Rn2;輸出層共m個神經(jīng)元。又設輸入層到第1 隱層權(quán)為wij,節(jié)點閾值為θj;第1 隱層到第2 隱層權(quán)為,節(jié)點閾值為θ′k;第2 隱層到輸出層權(quán)為w″kl,節(jié)點閾值為θ′l。于是各層神經(jīng)元輸出為:

顯然BP神經(jīng)網(wǎng)絡完成了n 維輸入空間到m 維輸出空間的映射。
3.2 BP 學習算法
BP 學習算法可用于訓練連接權(quán)值和節(jié)點閾值。設共有P個訓練樣本,d(1),d(2),…,d(p)為其對應的期望輸出,通過訓練誤差不斷校正連接權(quán)值和節(jié)點閾值,直到實際網(wǎng)絡輸出y(p)接近期望輸出d(p),學習規(guī)則基于最小均方誤差。當所有樣本都輸入后,總誤差為:

根據(jù)梯度下降法可計算各層的反傳誤差為:

圖3 給出了訓練和測試誤差隨訓練次數(shù)的變化情況,訓練和測試數(shù)據(jù)集都來自美國海軍研究院和美國海軍武器中心[4],4 層BP 網(wǎng)絡結(jié)構(gòu)為21-30-30-6,學習率η 取固定值0.02,目標誤差0.01,初始權(quán)值和閾值都是 (- 0.1,0.1)之間的隨機數(shù)。
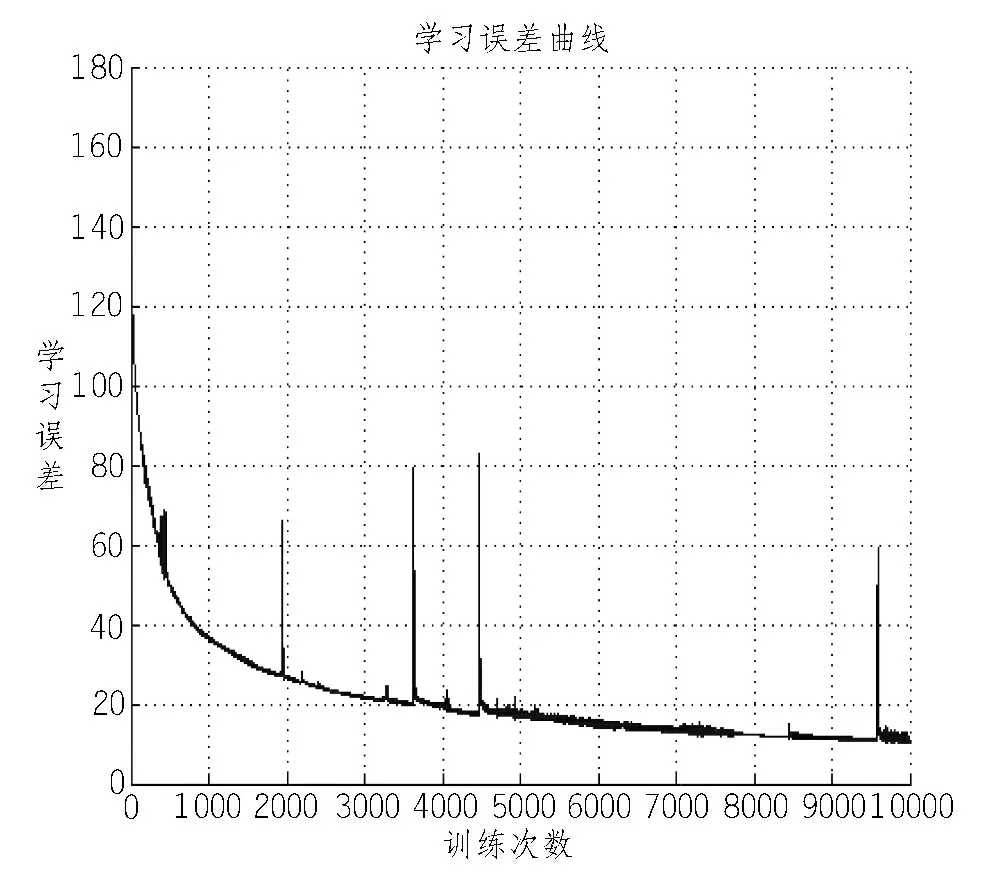
圖3 訓練誤差曲線Fig.3 Training error
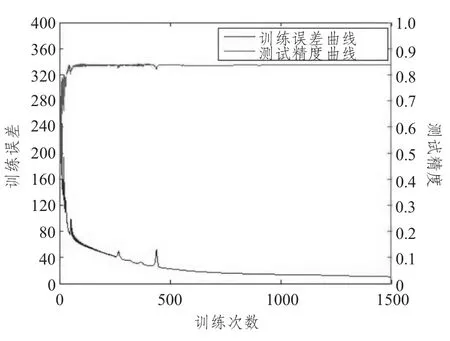
圖4 訓練誤差和測試精度曲線Fig.4 Training and testing error
為使分類精度和訓練誤差都達到最優(yōu),根據(jù)圖3,取最大訓練次數(shù)為1 500,為使分類結(jié)果有效,共進行5 組重復試驗。表1 給出了各重復實驗下算法對每個類別的分類精度。

表1 分類精度Tab.1 Classification accuracy
4 結(jié) 語
本文利用4 層BP 網(wǎng)絡對航母、驅(qū)逐艦、護衛(wèi)艦、客船、集裝箱、民用貨船6 種船只類型進行了分類。首先對圖像進行中值濾波,去除圖像隨機噪聲和椒鹽噪聲,然后利用OTSU法將灰度圖像分割成背景和目標2個部分,在此分割基礎(chǔ)上,提取了目標區(qū)域的Hu 不變矩、邊緣梯度方向直方圖、周長-面積比3個特征。為使邊緣梯度方向直方圖同樣也具有旋轉(zhuǎn)和尺度不變性,本文將直方圖循環(huán)右移至其最大值到達最右端。最后利用BP 網(wǎng)絡對船艦圖像進行了訓練和測試,對船艦的分類精度達到84%左右,有效實現(xiàn)了常見船艦類型的識別分類,具有一定參考價值。
[1]陳練,蘇強,董亮,等.國內(nèi)外海洋調(diào)查船發(fā)展對比分析[J].艦船科學技術(shù),2014,36(S1):2-7.CHEN Lian,SU Qiang,DONG Liang,et al.The development and comparative analysis of ocean survey ship[J].Ship Science and Technology,2014,36(S1):2-7.
[2]熊正南,蔡開仕,武鳳德,等.21 世紀美國戰(zhàn)略潛艇導航技術(shù)發(fā)展綜述[J].艦船科學技術(shù),2002,24(3):30-37.XIONG Zheng-nan,CAI Kai-shi,WU Feng-de,et al.Review of submarine navigation technology of United States in 21st century[J].Ship Science and Technology,2002,24(3):30-37.
[3]李聰.基于BP神經(jīng)網(wǎng)絡的股票指數(shù)期貨價格預測[D].青島:青島大學,2012.LI Cong.Prediction of stock index futures price based on BP network[D].Qingdao:Qingdao University,2012.
[4]劉世軍.海空背景下紅外艦船目標識別方法研究[D].成都:電子科技大學,2011.LIU Shi-jun.Ship recognition under sea-sky background[D].Chengdu:University of Electronic Science and Technology of China,2011.