基于BP神經網絡的圖像識別跟蹤技術
2015-12-04 07:07:20陳向奎
艦船科學技術 2015年4期
陳向奎,康 牧
(洛陽師范學院信息技術學院,河南 洛陽471022)
0 引 言
隨著社會經濟的發展,環境問題越來越突出,海洋中蘊含著各式各樣的資源,如石油、天然氣等,海洋成為另一個可開發空間,如何均衡有限的海洋資源與人類的關系是社會可持續發展的一個重要研究課題。
海洋環境中對船舶進行識別跟蹤能夠掌控船舶的安全生產和對環境的影響。自從19 世紀40年代提出關于神經元的數學模型后,人工神經網絡[1]有了突飛猛進的發展,并且具有大規模并行、分布式處理、自組織、自學習的優點,從而被廣泛的應用于語音識別、人臉識別、表情識別等方面[2]。本文利用BP神經網絡抗干擾性強、識別精準等優點對船舶進行識別跟蹤。首先獲取原始圖像,然后進行預處理,分別以圖像的全部灰度值為訓練樣本和以新不變矩特征向量為樣本集輸入到3 層BP神經網絡中,對含不同噪聲均值的圖像進行識別,實驗結果表明以新不變矩特征向量作為樣本集時抗噪能力強,識別率高。最后以新不變矩特征向量作為樣本集進行目標跟蹤得到跟蹤誤差。
1 基于BP神經網絡的圖像識別跟蹤技術研究
1.1 基于BP神經網絡的圖像識別流程圖
利用捕捉設備獲取被識別船舶的圖像,將獲取到的圖像進行圖像處理,包括圖像灰度化進行圖像增強,圖像閾值分割,將圖像與背景進行分離,便于后續的特征提取。利用不變矩進行特征提取,優先是此方法不受位置、方位、大小的影響,提取的特征向量能穩定地反映提取目標。最后利用BP神經網絡進行目標識別。
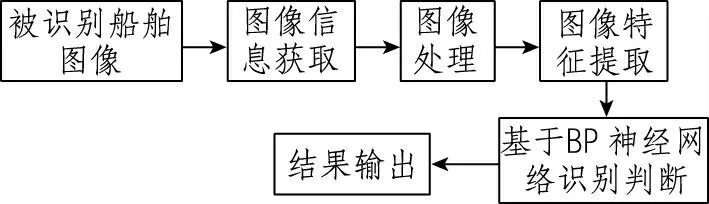
圖1 識別流程圖Fig.1 Recognition flowchart
1.2 基于BP神經網絡的圖像跟蹤流程圖
通過攝像頭捕捉運動畫面,通過監視器查看攝像機捕捉到的圖像,然后通過圖像增強、圖像校正對采集到的圖像進行噪聲抑制和干擾剔除,提高圖像的質量和對比度,然后進行一系列圖像信號處理和模式識別得到目標的位置,對已定位的目標進行跟蹤,調整其位置偏差,最后將此值傳送給伺機機構進行處理,實現目標跟蹤。
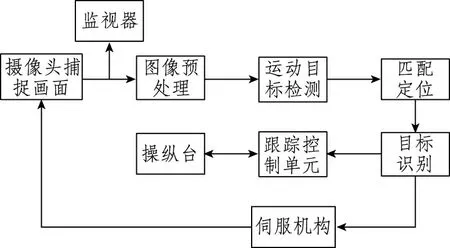
圖2 跟蹤流程圖Fig.2 Tracking flowchart
1.3 BP神經網絡結構[3]
BP神經網絡結構有輸入節點、輸出節點和隱節點組成。本文選用僅含1 層隱節點的BP神經網絡結構,如圖3所示。
圖3 中,i 為第i 層輸入;j 為第j 層隱層;k 為第k 層輸出;輸入節點為圖像每個特征值所對應的特征向量;輸出節點為經過分類器分類后所屬于的類別。
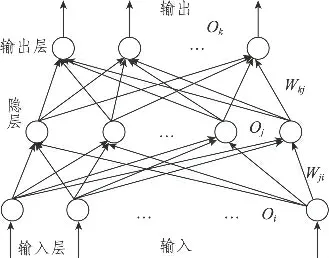
圖3 BP神經網絡Fig.3 BP neural network
利用BP神經網絡進行圖像識別跟蹤實質上是信號的傳播,類似于人體神經的工作進程,信號的傳遞歸納如圖4所示。
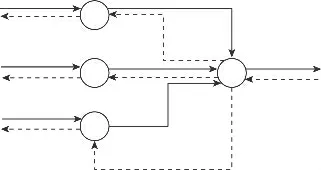
圖4 BP神經網絡正反信號傳播Fig.4 Positive and negative signal propagation of BP neural network
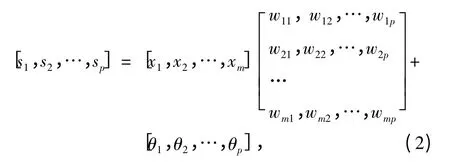
設BP神經網絡中的神經元,輸入層里共m個,輸出層里共n個,隱層里共p個,神經網絡中待訓練樣本個數為N 對,因此可得到神經網絡中輸入、輸出為:
輸入層輸入

理想情況下輸出向量

經過神經網絡計算后得到的實際輸出
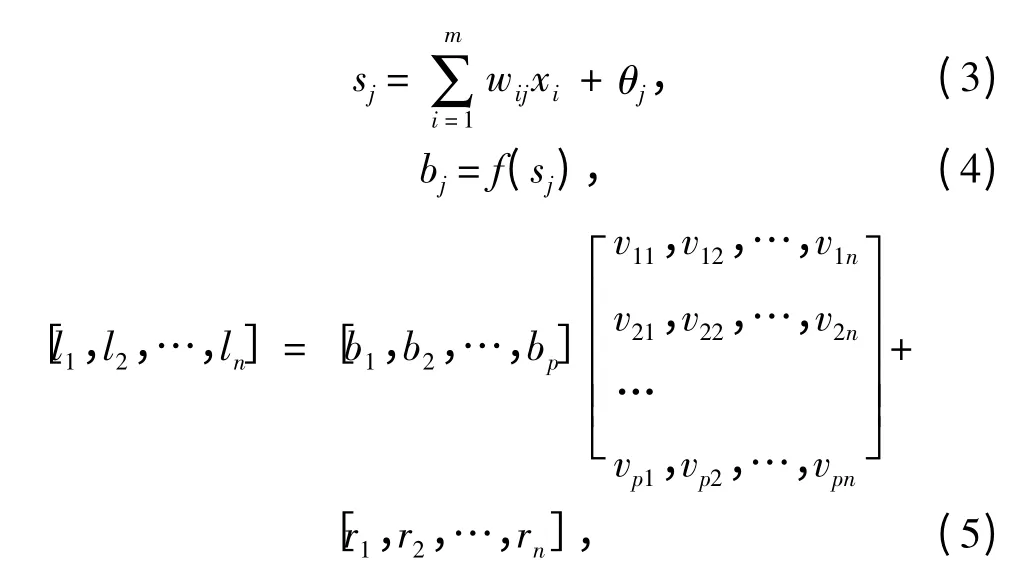
隱層的加權向量

隱層的輸出向量

輸出層的加權向量

式中:wij為輸入層與隱層之間的關系;vjt為隱層與輸出層之間的關系;θj為隱層各節點的最大值;ri為輸出層各節點的最大值。
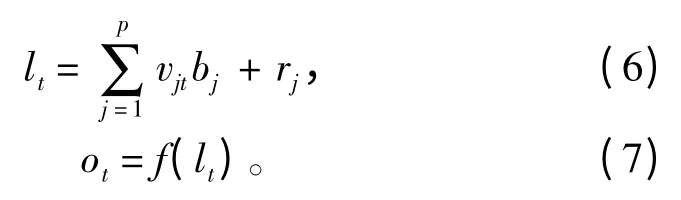
采用Sigmoid 型函數[4]作為層與層之間的傳輸函數,兩邊求導可得:

輸入與輸出之間的關系為:
因此得:
故得:
第k 對樣本(Xk,Yk)理想輸出值與實際輸出值之間的差為:
差值總和為:

輸出的校正誤差為:

由式(1)知:

隱層的校正誤差為:

全局誤差對輸入層和隱層連接權和最大值的負梯度為:
根據梯度下降原則,得:
式中:0 < α < 1,0 < β < 1;i=1,2,…,m;t=1,2,…,n;j=1,2,…,p。
從而得到調整后的輸入層和隱層連接權和最大值:
因而,通過上述推理得到BP神經網絡的訓練過程如下:
1)初始化網絡參數,即為wij,vjt,θj,rt賦予初值。
2)在輸入層輸入需要識別的樣本(X1,Y1)。
3)通過輸入樣本、輸入層與隱層之間的關系以及最大值計算出隱層的輸出值:bt=f(st),其中st=+ θi,j=1,2,…,p。
4)計算輸出層的輸出:ot=f(lt),其中lt=+ ri,t=1,2,…,n。
5)計算輸出層各個節點之間的校正差值:dt=ot·(1- ot)·(yt- ot),t=1,2,…,n。
6)計算隱層各個節點的校正差值:ej=bj·(1-bj)(1-ot)·(yt-ot)·vjt,t=1,2,…,n。
7)計算隱層到輸出層的新連接值:vjt(L+ 1)=vjt(L)+ αdtbjrt(L+1)=rt(L)+ αdt。
8)計算輸入層到隱層的新連接值:wij(L+1)=wij(L)+ βejxi,θj(L+1)=θj(L)+ βej。
9)然后進行下一組樣本的訓練,直至所有的樣本訓練完成,不斷調整連接權值和閾值,通過輸出層得到輸出值。
2 實驗結果
2.1 基于BP神經網絡的圖像識別
本文將輸入的圖像對為16 ×16,訓練集和測試集由每幅圖像總的像素向量組成。選用的神經網絡由1 層輸入層、1 層隱層和1 層輸出層組成。輸入層的節點數為16 ×16,輸出節點為4,根據參考文獻[5],隱層節點為11,測試不同噪聲級別樣本圖像的識別率如表1所示。

表1 不同噪聲級別樣本圖像的識別率Tab.1 Recognition rate of different noise
從表1 可看出,隨著噪聲的增大,識別率會越來越低,說明抗噪能力差。
將新不變矩特征[5]作為樣本集,測試不同噪聲級別樣本圖像的識別率如表2所示。

表2 不同噪聲級別樣本圖像的識別率Tab.2 Recognition rate of different noise
由表1和表2對比可知,在采用3 層BP神經網絡進行識別時,以新不變矩特征向量作為樣本集時抗噪能力強,識別率高。
2.2 基于BP神經網絡的圖像跟蹤
本文以新不變矩特征向量作為訓練圖像進行跟蹤,得到的識別誤差曲線如圖5所示。
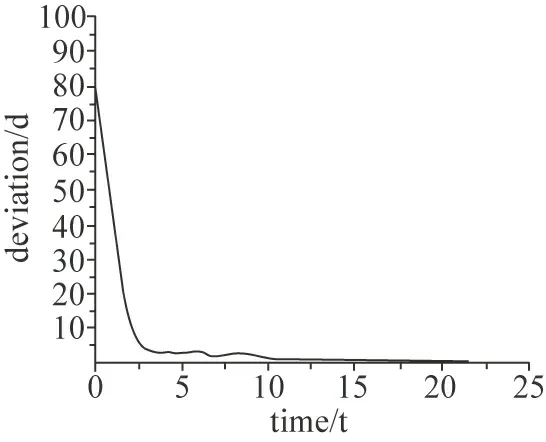
圖5 識別誤差曲線Fig.5 The recognition error curve
隨著時間的增長,BP神經網絡收斂,誤差越來越小,跟蹤效果越好。
3 結 語
本文通過對獲取的原始圖像分別以圖像的全部灰度值為訓練樣本和以新不變矩特征向量為樣本集輸入到3 層BP神經網絡中,對含不同噪聲均值的圖像進行識別。結果表明,以新不變矩特征向量作為樣本集時抗噪能力強,識別率高。最后以新不變矩特征向量作為樣本集進行目標跟蹤得到跟蹤誤差。
[1]WANG Yong-qing.Principles and methods of artificial intelligence[M].Xi'an Jiaotong University Press,2002:385-387.
[2]RAFAEL M,ABDELLAH E F.Multilayer neural networks:an experimental evaluation of on-line training methods[J].Computers & Operations Research,2004,31:1491-1513.
[3]JIAO Li-cheng.Neural network theory[M].Xidian University Press,1995.
[4]ZHAO Kuang-suo,LIN Jun-qing.Recognition of ship noise based on neural network[J].Ship Science and Technology,1995,11(6):32-36.
[5]CHANG Hua.Research on underwater target recognition based on BP neural networks[D].Northeastern University,2010.