MITS信息融合的船舶定位方法研究
2015-12-07 05:21:12郭娟,劉毅
艦船科學(xué)技術(shù) 2015年7期
郭 娟,劉 毅
(1.長江職業(yè)學(xué)院,湖北 武漢430074;2.中國船級社廣州分社,廣東 廣州510235)
0 引 言
隨著陸地資源的日漸匱乏,海洋資源越來越受到人們的關(guān)注與重視,相關(guān)海洋開發(fā)技術(shù)與設(shè)備也得到了快速發(fā)展。船舶深海作業(yè)作為重要的資源開采手段一直是人們研究的熱點(diǎn)問題,而船舶定位技術(shù)[1]在深海資源開發(fā)過程中起著至關(guān)重要的作用,加之海運(yùn)智能交通系統(tǒng)(MITS)在海洋領(lǐng)域的興起,利用MITS和其他多源信息融合技術(shù)實(shí)現(xiàn)定位的方法為船舶動力定位提供新思路。因此,本文以船舶定位為研究對象,對MITS信息融合的船舶定位方法進(jìn)行研究。本文結(jié)構(gòu)安排如下:首先提出基于MITS信息融合的船舶定位方法,給出了系統(tǒng)流程的設(shè)計(jì)方案。然后對該方法中的關(guān)鍵部分進(jìn)行詳細(xì)介紹,主要包括以下3 部分內(nèi)容:1)船舶動力定位的運(yùn)動模型;2)一種多傳感器融合的濾波方法,即自適應(yīng)的平方根容積卡爾曼濾波算法;3)基于支持向量機(jī)的預(yù)測模型。
1 基于MITS信息融合的船舶定位方法
船舶動力定位系統(tǒng)通常由測量、控制、推進(jìn)器3個部分組成[2]。在本文提出的方案中,基于MITS信息融合的船舶定位方法的系統(tǒng)流程如圖1所示。
1)測量所用到的數(shù)據(jù)由MITS 內(nèi)的信息及多傳感器信息共同組成,MITS 內(nèi)的信息主要包括船舶長度、寬度、排水量、舵高、舵面積等有關(guān)船舶自身的信息以及當(dāng)前船舶運(yùn)動的相關(guān)信息,多傳感器包括位置、舵向、運(yùn)動、風(fēng)傳感器。
2)控制部分主要通過信息融合方法對位置、舵向等進(jìn)行估計(jì),并通過前饋控制共同向推進(jìn)器發(fā)出指令。
3)推進(jìn)器主要作用是在得到控制指令后,根據(jù)指令驅(qū)動船舶的運(yùn)動,以保證船舶在外力刺激的情況下依然正常作業(yè)。
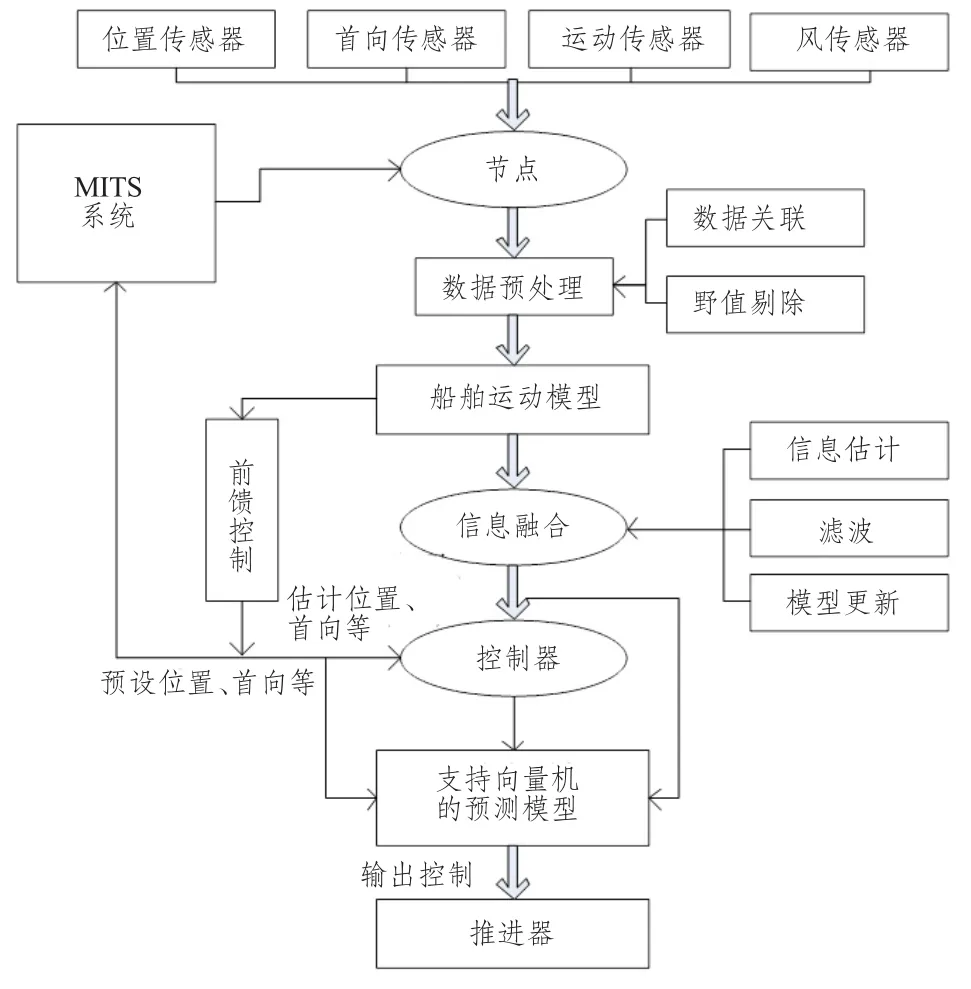
圖1 系統(tǒng)流程圖Fig.1 System flowchart
1.1 船舶動力定位的運(yùn)動模型
本文主要研究在低速運(yùn)動條件下的船舶定位問題,因此,船舶動力定位的運(yùn)動模型采用CWNA (連續(xù)白噪聲加速度)模型[3]。模型表示方法如下:
二階的運(yùn)動模型為:

其狀態(tài)方程為:




進(jìn)而,船舶定位的運(yùn)動模型為:
式中:w(t)表示均值為0的白噪聲向量。
1.2 濾波方法
在船舶定位過程中,在相關(guān)數(shù)據(jù)信息進(jìn)行融合之前必須做濾波的預(yù)處理,而濾波算法的精度和穩(wěn)定性對系統(tǒng)的信息融合性能有著重要影響。為了提高濾波算法的魯棒性,本文選用自適應(yīng)的平方根容積卡爾曼濾波算法,即SRCKF 算法。SRCKF 算法過程[4]如下:
容積點(diǎn)為:

式中:m = 2n;ζi為母線(1,0,0,…,0)T元素置換得到的向量。
1)時間更新

式中:Qk-1=SQ,k-1,SQ,k-1為Qk-1的平方根系數(shù);為加權(quán)的中心矩陣,表示為:
2)測量更新

互協(xié)方差矩陣為:

新協(xié)方差矩陣:
那么,k 時刻的濾波增益表示為:

k 時刻的狀態(tài)估計(jì)為:

k 時刻的誤差協(xié)方差陣的平方根系數(shù):

1.3 預(yù)測模型
支持向量機(jī)(SVM)是一種非線性預(yù)測技術(shù),擁有很好的并行處理能力,并且自容錯與自學(xué)習(xí)能力強(qiáng),在復(fù)雜模型中得到了很好的應(yīng)用,因此,文本采用支持向量機(jī)的預(yù)測模型。主要過程如下:
1)相空間重構(gòu)
設(shè)定位系統(tǒng)中可測變量為x1,x2,x3,…,xM,M 表示數(shù)量,xi的時間序列表示為{xi,j},j = 1,2,…,N。
設(shè){xi,j}合并后的序列為Y,則:

重構(gòu)的相空間為:

式中:τi為時間延遲;di為嵌入維數(shù)。設(shè)d 維空間上的光滑函數(shù)為F,則有:

因此,有:

訓(xùn)練樣本為的輸入向量為:

輸出向量為:

2)確定時間延遲參數(shù)
本文采用平均位移法確定時間延遲τi。
設(shè)x(i)與x(i + τ)的平均距離為Sm(τ),則:

在Sm(τ)線性區(qū)域中,取末端對應(yīng)的τ為最佳時延參數(shù)。
3)確定嵌入維數(shù)
本文采用平均誤差最小化方法確定嵌入維數(shù),設(shè)誤差函數(shù)為:

當(dāng)E 取得最小值時,嵌入維數(shù)為最佳值。
2 仿真實(shí)驗(yàn)
本文的仿真實(shí)驗(yàn)主要針對橫向和縱向的控制力進(jìn)行測試,并且與最優(yōu)二次型方法進(jìn)行對比。實(shí)驗(yàn)數(shù)據(jù)如下:
1)訓(xùn)練數(shù)據(jù)
橫 向 (× 103):4.79、4.11、0.86、6.94、6.46、2.0、-7.15、3.28、-8.11、0.97、14.68、-0.314、-3.15、-5.62、-7.56、-13.75、-3.45、0.98、-0.93、0.81;
縱向 (× 103):0.83、2.18、-1.25、5.43、-0.16、4.43、-1.91、3.46、1.65、0.5、3.92、-3.87、3.06、1.57、-1.89、-3.43、-0.44、1.2、4.04、3.42。
2)測試數(shù)據(jù)
橫向 (× 103):-3.47、4.3、4.43、3.16、3.71、2.08、-2.49、3.15、1.63、5.68、6.77、-10.31、-2.19、-3.32、-1.29、0.33、-4.42、-3.02、-1.20、-9.15;
縱向(×103):-2.25、-2.78、-3.09、-0.83、2.72、1.08、-4.26、2.63、-1.94、3.19、1.34、-2.68、2.18、2.96、3.95、3.74、5.08、1.69、0.86、-1.35。
實(shí)驗(yàn)結(jié)果如圖2~圖3所示。
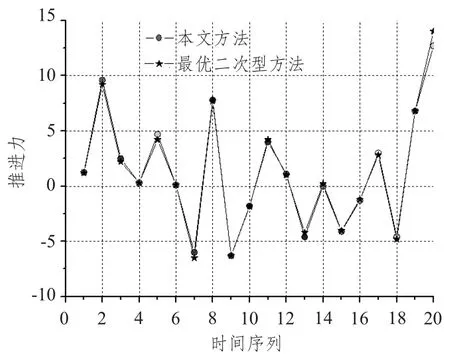
圖2 預(yù)測誤差(橫向)Fig.2 The prediction error (Horizontal)
實(shí)驗(yàn)結(jié)果表明,本文提出的方法與最優(yōu)二次型方法得到的推進(jìn)力預(yù)測誤差基本一致,因此,本文提出的方法具有可行性。
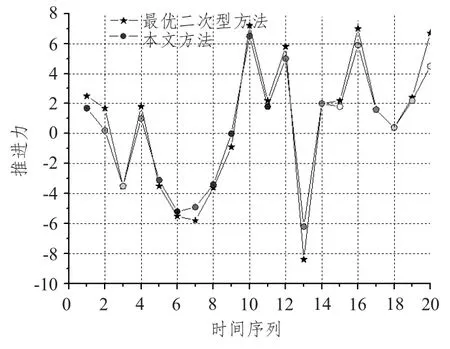
圖3 預(yù)測誤差(縱向)Fig.3 The prediction error (Vertical)
3 結(jié) 語
本文對船舶定位方法進(jìn)行研究,提出了基于MITS信息融合的船舶動力定位方法,給出了系統(tǒng)流程的設(shè)計(jì)方案,并對定位的運(yùn)動模型、多傳感器融合的濾波方法以及預(yù)測模型等方法進(jìn)行介紹。實(shí)驗(yàn)結(jié)果表明,本文提出的利用MITS信息融合的動力定位方法新穎且具有可行性。
[1]吳德烽,楊國豪.船舶動力定位關(guān)鍵技術(shù)研究綜述[J].艦船科學(xué)技術(shù),2014,36(7):1-6.WU De-feng,YANG Guo-hao.Review on key techniques for ship dynamic positioning system[J].Ship Science and Technology,2014,36(7):1-6.
[2]孫弢.多傳感信息融合的船舶動力定位控制系統(tǒng)設(shè)計(jì)與仿真[J].艦船科學(xué)技術(shù),2014,36(12):116-119.SUN Tao.Design and simulation of dynamic positioning control system of vessels based on multi-sensor information fusion[J].Ship Science and Technology,2014,36(12):116-119.
[3]YAAKOV B S,LI X R,KIRUBARAJAN T.Estimation with applications to tracking and navigation.New York:John Wiley & Sons,Inc.,2001.
[4]ARASARATNAM I,HAYKIN S.Cubature kalman filters[J].IEEE Trans.Automatic Control,2009,54(6):1254-1269.
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
船舶(2021年4期)2021-09-07 17:32:22
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
航海(2005年4期)2005-04-29 00:00:00