無姿態傳感器下RTK三維水深測量方法
2015-12-08 15:03:28杜國元黃金發沈理
中國水運 2015年11期
杜國元++黃金發++沈理
摘 要:采用RTK三維水深測量的方法進行精密單波束水深測量是目前研究的熱點,但其具體實施方法尚無成文的規定。本文在分析水深測量誤差的基礎上探討了無姿態傳感器條件下的進行精密單波束水深測量的方法,并以實例進行了驗證。
關鍵詞:RTK 三維 水深測量 精密 單波束 誤差
水深測量是測繪活動中一項常見而重要的內容,在海圖測繪、江河湖泊及水庫調查、涉水項目工程設計、涉水建筑物安全維護、航道監測、水道沖淤研究等方面均需要進行不同比例尺的水下地形圖的測繪。
水深測量的目的是獲取水底不同位置相對于某一穩定的高程(深度)基準面的高程(水深),測深和定位是水深測量兩項最主要的內容。由于在絕大部分情況下水深測量都是動態條件下的測量,測量載體的姿態和水深基準面的確定在大多數情況下已成為影響著水深測量精度的主要因素。因此確定水深測量時測量載體的姿態變化和測量瞬間的測量基準面的位置成為提高水深測量的關鍵。
最新的《水運工程測量規范》(JTS131-2012)已規定可以采用“RTK三維水深測量”方法進行精密水深測量,并規定了指導性的作業方式和數據處理方法。其定義為:“RTK三維水深測量是利用GPS RTK 提供的瞬時高精度三維解,通過時延改正、姿態改正,最終為回聲測深系統換能器提供準確的三維基準,進而根據回聲測深結果,得到水底點的三維坐標。”但對何種條件下必須采用姿態傳感器,規范里并無明確的規定。
為此需要分析不同條件下的水深測量誤差,確定需要采用姿態傳感器設備的條件。
水深測量誤差分析
正如前面分析所言,水深測量的誤差來源眾多,包括定位的誤差、測深儀自身的測距誤差,測量介質引起的聲速效應誤差、測量載體姿態引起的測量誤差等。其中定位誤差目前已可忽略,測深儀自身的測距誤差也遠小于其它因素的影響。這里可以認為對測量深度的主要因素包括傳播介質、測量載體等相關效應,有聲速、姿態和船只靜、動吃水的影響。具體分析如下。
1、聲速效應對測深的影響
聲速效應的影響直接影響到回聲測深儀測量的深度部分,根據回聲測深原理,深度等于介質中聲波傳輸速度與傳播時間一半的乘積,而聲波在水體中的傳播速度并非是一個固定值,它和測時環境相關,同水體的溫度、鹽度、密度以及聲波頻率相關,可以根據測區水域的溫度和鹽度進行改正,通常公式計算某溫度、鹽度下的聲速。
由于水體中(特別是海區)的水溫和鹽度在垂直方向上存在梯度分布,引起聲速在垂直方向上存在梯度分布,而且位置不同,聲速梯度分布也不盡相同。在測量的時候,不同的測點需采用該測點測量時聲速傳播路徑上的平均聲速(可采用聲速剖面儀測定),采用后處理的方法進行聲速改正,
理論上:平均聲速Cm應為聲波傳播全路徑上的瞬時聲速平均值,若采用水深參數h表達應為:
■(1),(1)中:D為從換能器到水底的深度。
由于不可能知道聲速傳播路徑上每一處的聲速,故在實際計算中采用式(2)進行抽樣離散的計算:
■(2),式(2)中,n為聲波路徑上的抽樣數,也就是分層數;di為各水層的厚度,Ci為各水層的聲速值,n值越大,即抽樣數越多,結果越準確。
上式(2)可稱為計算平均聲速的精確公式。
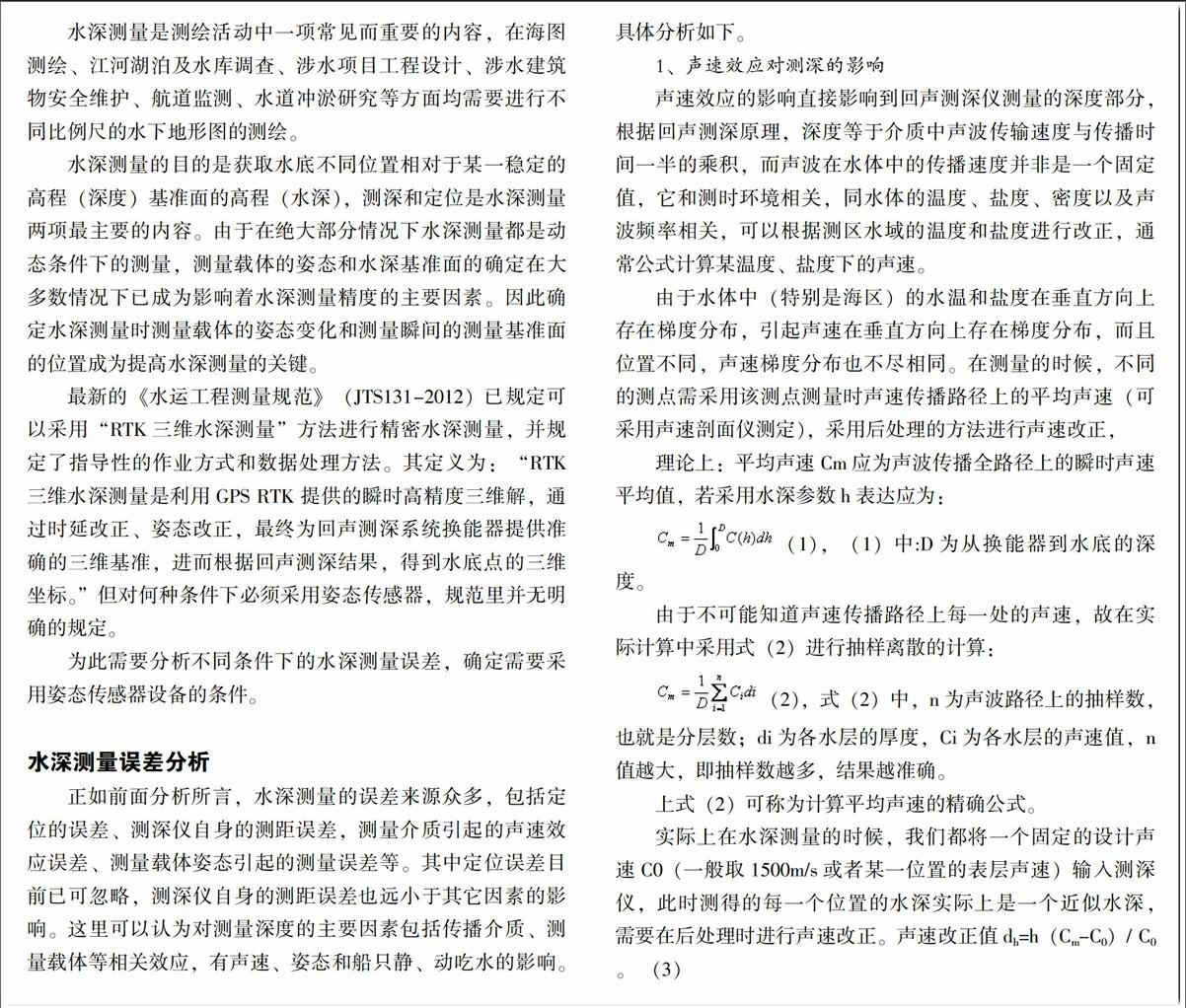
實際上在水深測量的時候,我們都將一個固定的設計聲速C0(一般取1500m/s或者某一位置的表層聲速)輸入測深儀,此時測得的每一個位置的水深實際上是一個近似水深,需要在后處理時進行聲速改正。聲速改正值dh=h(Cm-C0)/ C0 。 (3)
從上式(3)可知,測深值的聲速改正值與觀測深度成正比,水深越大,聲速改正值越大,還與聲速差成正比。改正值數值的大小見下表1所示:
表1 聲速改正值數值表
2、測船姿態變化產生的測深誤差
姿態影響是指載體受到風、浪、流的作用而導致的測量不準,無論是橫搖、縱搖、艏搖和傾斜,其作用機理都是導致測深儀中心波束傾斜而產生復雜的誤差變化,它是一個即影響平面定位又影響深度測量的復雜過程。
2.1 測船橫搖產生的測深誤差
理論上,波浪對測深的影響是通過對船姿態的改變來產生作用的,因此,波浪對測深的影響可分為測船縱搖,橫搖、升沉等對測深的影響幾個方面。
設α為測船橫搖角,左舷下傾時取正值,θ為換能器半波束角,s為記錄深度,d為真實深度。很明顯,如果│α│≤θ,α角造成的測深信號的偏移仍在波束角范圍之內,所測得的深度可以認為是沒有附加誤差的,則發射的測深信號偏離了垂直方向而產生了附加誤差。
一般情況下,測深線是沿水底地形變化梯度方向布設的,所以沿測深線垂直方向(即測船的橫搖方向)可以認為是平面,此時產生的附加深度誤差Δdroll可以估計為:
Δdroll = H'-H =s[cos(α-θ)-1] (4)
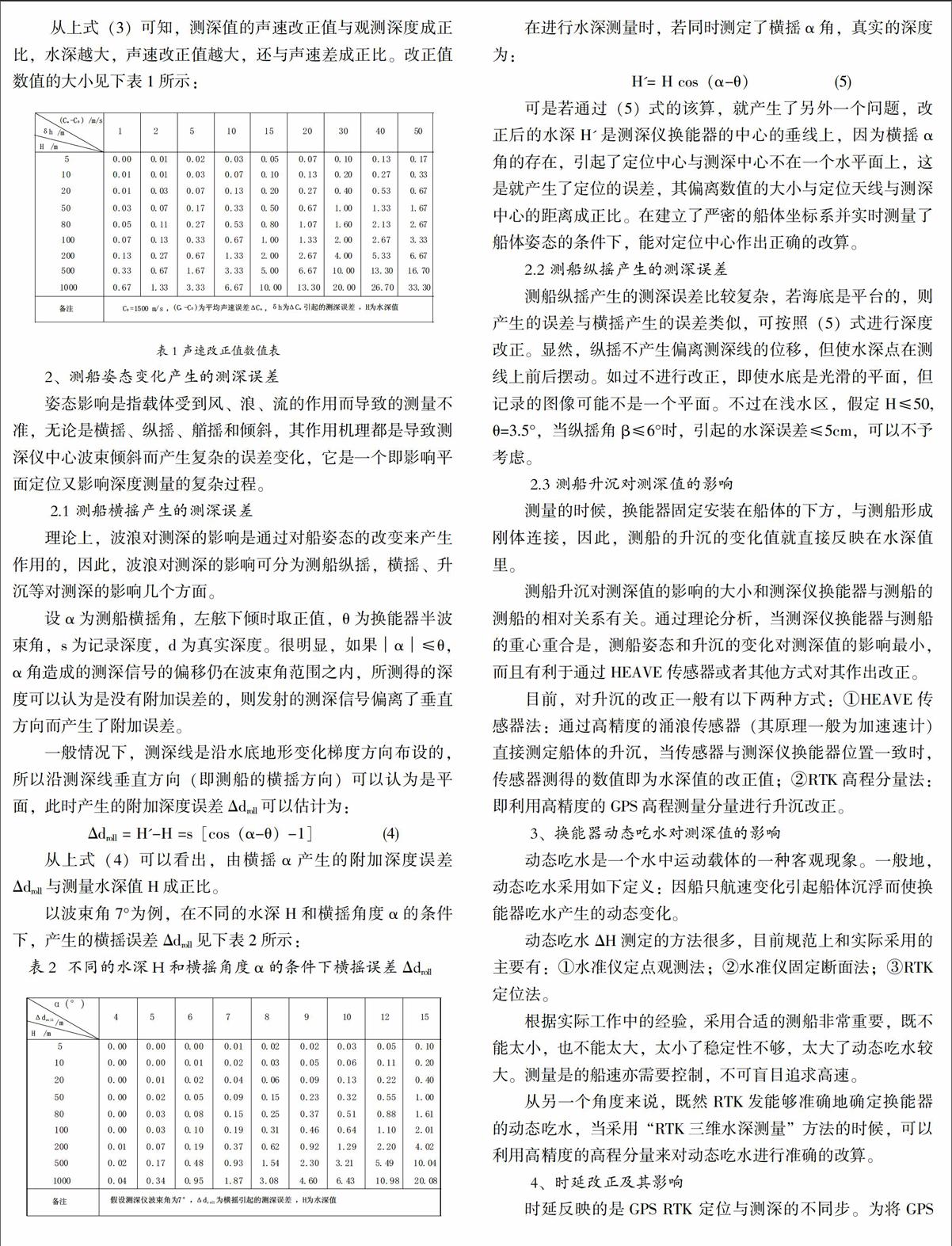
從上式(4)可以看出,由橫搖α產生的附加深度誤差Δdroll與測量水深值H成正比。
以波束角7°為例,在不同的水深H和橫搖角度α的條件下,產生的橫搖誤差Δdroll見下表2所示:
表2 不同的水深H和橫搖角度α的條件下橫搖誤差Δdroll
在進行水深測量時,若同時測定了橫搖α角,真實的深度為:
H'= H cos(α-θ) (5)
可是若通過(5)式的該算,就產生了另外一個問題,改正后的水深H'是測深儀換能器的中心的垂線上,因為橫搖α角的存在,引起了定位中心與測深中心不在一個水平面上,這是就產生了定位的誤差,其偏離數值的大小與定位天線與測深中心的距離成正比。在建立了嚴密的船體坐標系并實時測量了船體姿態的條件下,能對定位中心作出正確的改算。
2.2 測船縱搖產生的測深誤差endprint
測船縱搖產生的測深誤差比較復雜,若海底是平臺的,則產生的誤差與橫搖產生的誤差類似,可按照(5)式進行深度改正。顯然,縱搖不產生偏離測深線的位移,但使水深點在測線上前后擺動。如過不進行改正,即使水底是光滑的平面,但記錄的圖像可能不是一個平面。不過在淺水區,假定H≤50, θ=3.5°,當縱搖角β≤6°時,引起的水深誤差≤5cm,可以不予考慮。
2.3 測船升沉對測深值的影響
測量的時候,換能器固定安裝在船體的下方,與測船形成剛體連接,因此,測船的升沉的變化值就直接反映在水深值里。
測船升沉對測深值的影響的大小和測深儀換能器與測船的測船的相對關系有關。通過理論分析,當測深儀換能器與測船的重心重合是,測船姿態和升沉的變化對測深值的影響最小,而且有利于通過HEAVE傳感器或者其他方式對其作出改正。
目前,對升沉的改正一般有以下兩種方式:①HEAVE傳感器法:通過高精度的涌浪傳感器(其原理一般為加速速計)直接測定船體的升沉,當傳感器與測深儀換能器位置一致時,傳感器測得的數值即為水深值的改正值;②RTK高程分量法:即利用高精度的GPS高程測量分量進行升沉改正。
3、換能器動態吃水對測深值的影響
動態吃水是一個水中運動載體的一種客觀現象。一般地,動態吃水采用如下定義:因船只航速變化引起船體沉浮而使換能器吃水產生的動態變化。
動態吃水ΔH測定的方法很多,目前規范上和實際采用的主要有:①水準儀定點觀測法;②水準儀固定斷面法;③RTK定位法。
根據實際工作中的經驗,采用合適的測船非常重要,既不能太小,也不能太大,太小了穩定性不夠,太大了動態吃水較大。測量是的船速亦需要控制,不可盲目追求高速。
從另一個角度來說,既然RTK發能夠準確地確定換能器的動態吃水,當采用“RTK三維水深測量”方法的時候,可以利用高精度的高程分量來對動態吃水進行準確的改算。
4、時延改正及其影響
時延反映的是GPS RTK 定位與測深的不同步。為將GPS RTK 三維歸位到換能器,為測深提供瞬時平面和垂直基準,并最終實現波束在水下的歸位計算,就必須消除時延的影響。
若船速為8 節(約4.111 m/s),導航時延確定誤差為0.2 秒,則導航時延確定誤差統計結果表明:時延誤差引起的最大平面位置偏差為0.8m。
通過理論研究,時延對平面定位和測深的影響最為顯著,其影響與船速成正比。因此,實際作業中,一方面應根據實驗精確計算時延;另一方面應盡量減小船速,保持測量載體的穩定性,將時延確定誤差的影響減小到最小。
無姿態傳感器條件下的RTK三維水深測量的實施
無姿態傳感器的“RTK 三維水深測量”構成簡單,只是在常規的水深測量系統中特別強調了厘米級的定位和高程測量。由于GPS RTK測量或者是PPK測量獲得高精度的平面定位和高程數據已經是相當成熟的技術,在多年的測量實踐中已得到驗證和應用,太多的論文和文獻對這個問題進行了闡釋。
無姿態傳感器的“RTK 三維水深測量”主要包括以下幾個環節:①測區控制網測量;②高程轉換模型的建立;③高精度聲速剖面的測量;④內業資料處理;⑤精度評估。
筆者在80公里的長江入海口河段進行了驗證測量,該河段屬于感潮河段采用常規的驗潮站進行水下地形測量需要耗費大量的人力。而采用“RTK 三維水深測量”將大大地減小工作量。
驗證測量實施過程如下:在測區兩岸布設一定密度的E級GPS控制網,聯測控制點的水準高程,采用幾何曲面模型構建了該區域的高程轉換模型。實現了GPS大地高到正常高系統的無縫轉換。
在進行“RTK 三維水深測量”的同時,根據規范的要求。在測區兩岸布設了20個驗潮站進行潮位控制,以便兩者進行對比。通過兩種方法對水下測點高程的計算,對計算出的差異成果按照0.1m的區間寬度進行分析統計。共統計測點測點32153個,差異區間如下表3所示。
表3 兩種方法計算的測點高程差值統計表
以上實例表明,該項目中采用不需要任何姿態傳感器的RTK的三維水深測量技術得到的測量結果與常規的潮位控制得到的結果沒有明顯的差異,其精度和可靠性都得到了很好的驗證。
總結
從以上從六個引起測深誤差的主要方面進行了分析,并定量地分析計算了在不同的測量條件下,這些影響因素對測深帶來的誤差的數值,同時通過實例進行了分析,可以得出很重要的結論:
在目前的技術條件下,定位和測深引起的誤差在水深測量誤差中已退居次要地位,聲速改正誤差和測量載體的姿態誤差等因素已稱為水深測量誤差的主要來源。
輔以姿態傳感器、羅經等外部設備的“RTK三維水深測量”,能夠精確地改正各項的主要測量誤差。為了簡化操作,且在經濟上簡便易行,有必要研究無姿態傳感器條件下RTK三維水深測量的實施條件。
具備一定的的測量環境,可以不需要任何姿態傳感器(包括羅經和涌浪傳感器)就可實現基于RTK的三維水深測量技術的單波束精密測深。
參考文獻:
[1] 周豐年,趙建虎,周才揚. 多波束測深系統最優聲速公式的確定[J]. 臺灣海峽,第20卷第4期,2001,11.
[2] 管錚. 西北太平洋大于200米水深回聲測深改正公式[J]. 測繪學報,第16卷第1期,1987年2月.
[3] 申家雙 陸秀平. 水深測量數據處理方法研究與軟件實現[J]. 海洋測繪,第22卷第5期,2002年9月.
[4] 劉雁春. 海洋測深空間結構及其數據處理[M]. 測繪出版社,2003.
[5] 交通運輸部. 水運工程測量規范JTS131-2012[M]. 北京:人民交通出版社,2012.
(第一、三作者單位:長江水利委員會水文局長江口水文水資源勘測局,第二作者單位:上海祥陽水利勘測設計有限公司)endprint