BDS IODE字段制定方法研究
2015-12-11 05:57:46鄭洪艷
測繪通報 2015年5期
關鍵詞:方法
鄭洪艷,劉 暉,錢 闖
(武漢大學衛星導航定位技術研究中心,湖北武漢430072)
一、概 述
北斗差分技術(Differential BeiDou Satellite System,DBDS)與現有DGNSS原理相同,是利用誤差相關性或通過分離誤差源提高定位精度和可靠性的一種方法。2013年中國衛星導航系統管理辦公室公布《北斗衛星導航系統空間信號接口文件》第二版本(ICD 2.0),ICD 2.0 較 ICD 1.0 增加了 B2I信號方面的定義[1],使得單獨基于北斗衛星導航定位系統(BeiDou Satellite Navigation System,BDS)的雙頻偽距和載波相位差分成為可能。
差分協議規定了提高衛星導航精度和完備性性能的數據傳輸格式、計算方法、硬件和數據鏈要求等。RTCM SC-104是目前全球應用最為廣泛的差分系列標準,其中最具代表性的是RTCM SC-10402.X和RTCM SC-10403.X標準系列,它們對BDS的支持正在不斷完善中。
差分協議要求參考站和流動站間必須使用同一組衛星星歷和鐘差參數進行差分改正計算,因此正確標識與識別星歷和鐘差參數組便成為正確差分計算的基礎。GPS、GLONASS、Galileo和 BDS的差分計算都存在對星歷和鐘差參數組的標識和識別問題,解決方案也不盡相同。
本文在分析GPS等星歷和鐘差參數組識別方法的基礎上,結合BDS導航電文參數的特點,提出北斗差分數據期卷(BDS RTCM IOD)的設計方案并進行比較,最終給出該字段的建議方案。
二、差分電文的數據齡期字段
差分協議對星歷和鐘差參數組的標識和識別可分為兩部分:一是根據一定規則建立與參數組相關的識別參數,該識別參數在一定時間段內應唯一;二是利用識別參數對參數組進行識別,判斷差分電文采用的參數組與本地接收到的參數組是否一致。GPS、GLONASS和Galileo分別定義了不同的識別參數[2-3],詳見表 1。
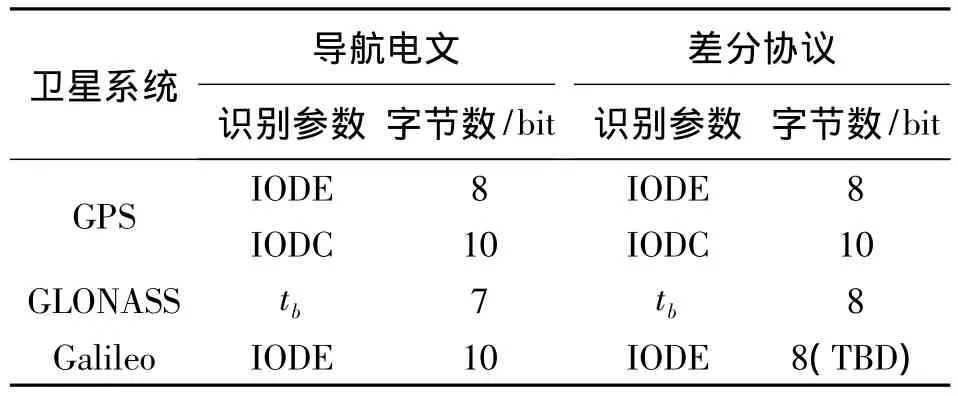
表1 GPS、GLONASS和Galileo衛星星歷和鐘差識別參數
1.GPS數據期卷字段
GPS衛星星歷和鐘差參數組的識別參數是星歷數據期卷IODE(issue of data,ephemeris)和鐘差數據期卷IODC(issue of data,clock),二者都是數字。當衛星星歷和鐘差參數變化時,IODE和IODC值也相應地改變,且在一段時間內取值唯一。
GPS IODC由2位最高有效位(MSB)和8位最低有效位(LSB)構成。IODE長8 bit,一般與IODC的8位最低有效位相同,當IODE與IODC最低8位不相等時,說明數據集發生變化,需要進行數據采集。GPS IODE取值與前6 h不同,IODC取值需保證與前7 d不同[2-4]。圖1是 GPS衛星(PRN8)在15 d內IODE和IODC取值的變化情況。
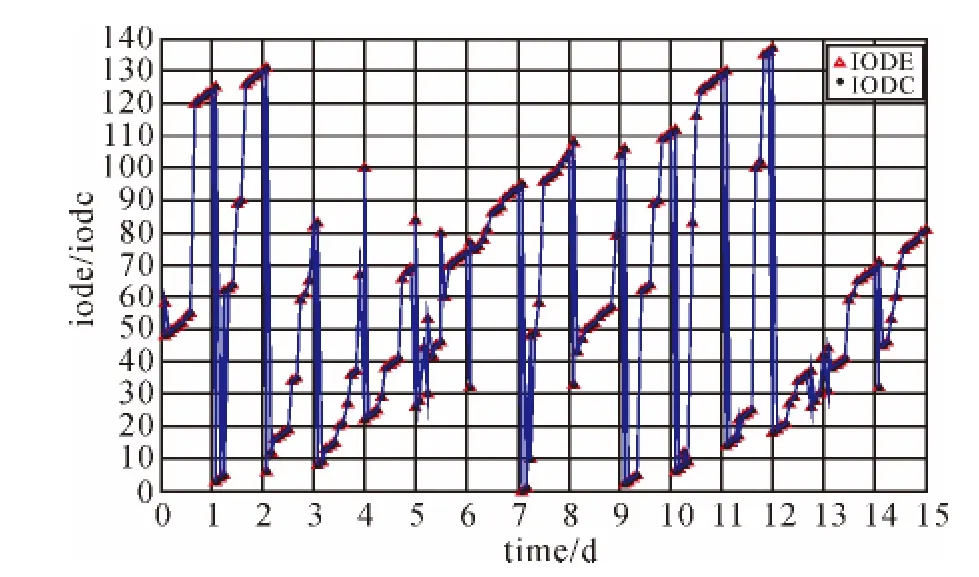
圖1 GPS衛星IODE及IODC變化情況(PRN 08,2014年 DOY140~154)
由圖1可以看出,GPS衛星IODE與IODC相等,且在7 d時間內取值唯一。
由于GPS L5信號對應的CNAV電文不包含IODE參數定義,其 toe 參數長 11 bit,分辨率為 300 s[4-6]。RTCM采用CNAV toe的8位最低有效位作為識別參數,其取值在12 h內唯一,發揮IODE的作用。
2.GLONASS衛星星歷識別參數
GLONASS不采用“數據期卷(IOD)”這一定義。但是,在GLONASS系統正常運營期間,其衛星星歷的變化與參數tb(Time of Data)的取值相呼應,可以使用tb識別衛星星歷。tb為基于UTC(SU)+3 h的天內時間間隔。差分電文中定義的GLONASS IOD長8 bit,其0~6 bit是由 tb構成的最低有效位,第7 bit設為“0”并忽略不計。即在差分應用中,用戶通過將差分電文與GLONASS導航電文的參數tb進行比較,判斷用戶設備與參考站改正數是否基于同一組衛星軌道計算[2-3,7-8]。
3.Galileo衛星數據齡期
與GPS相似,Galileo定義了IODnav字段識別衛星星歷、IODa識別歷書參數。RTCM差分協議計劃采用10 bit長的IODnav識別衛星星歷。由于差分協議中IOD參數數據域僅長8 bit,暫定Galileo系統IOD由最高位的一個“0”與IODnav的7位最低有效位(LSB)構成。實際應用中可能存在兩個相鄰歷元IOD的7個最低有效位相等的情況,此時Galileo 系統 IOD 最高位取值為“1”[2-3,8-9]。
三、BDS數據齡期
BDS導航電文中定義了數據齡期AOD(age of data)而非數據期卷IOD(issue of data),是衛星星歷和鐘差參數的外推時間間隔[1]。其中,星歷數據齡期AODE是星歷參數的外推時間間隔,即本時段衛星星歷參數參考時刻與計算星歷參數所作測量的最后觀測時刻之差。同理,鐘差數據齡期AODC是鐘差參數的外推時間間隔,即本時段鐘差參數參考時刻與計算鐘差參數所作測量的最后觀測時刻之差。二者均在BDT整點更新,取值范圍為0~31。
分析數據由CDDIS官網獲得。由圖2—圖6可以看出:
1)BDS AODE和AODC間沒有確定的關系,其值之差大部分情況下為1。
2)GEO衛星AODE取值變化很小且大部分時間為1,一般不大于4。
3)IGSO衛星AODE呈現出周期約為1 d的變化規律,且大部分時間取值為1,一般不大于8。
4)MEO衛星AODE取值范圍0~31,數值變化較大。
探究原因認為,由于BDS GEO衛星相對于地球靜止,可以保持與控制中心的持續通信,參考時刻與最后觀測時刻之差恒小于1 h(特殊情況除外),表現為其AODE取值大部分時間為1[10]。而由于目前BDS控制中心在全球分布不均勻,主要集中在中國大陸地區,因此IGSO和MEO衛星在逐漸靠近中國大陸地區時,參考時刻與最后觀測時刻之差減小,相應AODE取值變小,反之AODE取值增大,如圖5和圖6所示。
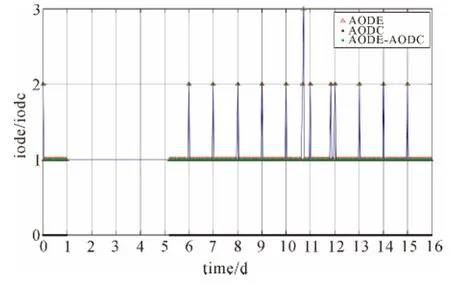
圖2 BDS GEO衛星AODE與AODC取值隨時間的變化(PRN 04,2014年 DOY 139~154)
綜上可知,BDS已定義的數據齡期(AOD)與衛星空間位置緊密相關,而與時間和數據集變化的關系并不明顯。AODE和AODC不能用于識別衛星星歷和鐘差參數數據集的變化,為此需要定義新的參數用于在差分應用中識別衛星星歷。
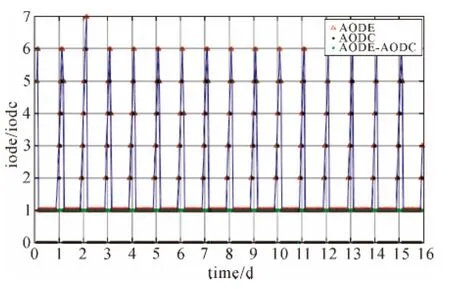
圖3 BDS IGSO衛星AODE與AODC取值隨時間的變化(PRN 08,2014年 DOY 139~154)
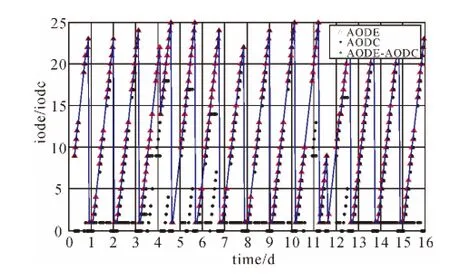
圖4 BDS MEO衛星AODE與AODC取值隨時間的變化(PRN 14,2014年 DOY 139~154)
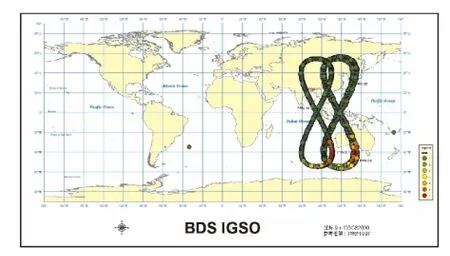
圖5 BDS IGSO衛星AODE取值隨衛星空間位置變化情況(PRN 05-10,2014年 DOY 139~154)
四、BDS RTCM IODE字段制訂方案
綜合GPS、GLONASS和 Galileo系統空間接口文件和差分協議中IOD(GLONASS tb)的定義,BDS衛星星歷識別參數應具有以下性質:
1)體現衛星星歷數據集的變化,即識別參數隨衛星星歷數據集的變化取值不同。
2)數據域長8 bit,取值范圍0~255。
3)在一定時間段內取值唯一。
4)體現數據的有效性[9]。
參考GPS、GLONASS和 Galileo系統衛星星歷識別方法,提出以下3種計算BDS衛星星歷識別參數的方法:
1)采用toe作為識別參數。
2)基于toe生成識別參數。
3)基于AODE和toe生成識別參數。
1.采用toe作為識別參數
BDS toe參數長17 bit,分辨率為8 s,在7 d時間內取值唯一。根據分析,BDS正常運行中不會出現導航電文不同而toe相同的情況(BDS不正常時,導航電文中的衛星健康字會發生變化,提示不要使用該衛星數據)。因此可以考慮采用toe作為衛星星歷識別參數。
但是由于 toe參數長度為 17 bit,遠遠超過RTCM差分協議中IODE定義的8 bit長度,會造成差分和導航電文的數據量的增加。尤其在低速數據鏈環境下(如沿海差分臺站),將極大影響使用效率。
2.基于toe生成識別參數
(1)采用“0”/“1”+toe的7位最低有效位作為識別參數
參考RTCM差分協議關于GPS CNAV識別參數的定義,以toe的8位最低有效位作為差分應用中BDS衛星星歷識別參數,如圖7、圖8所示。
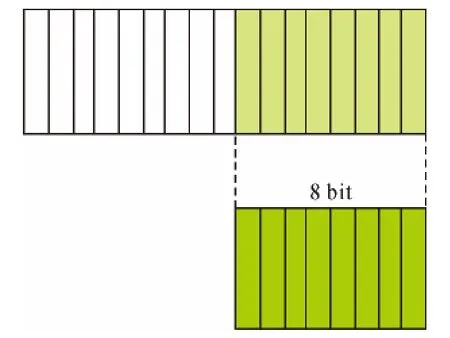
圖7 以toe的8位最低有效位作為識別參數
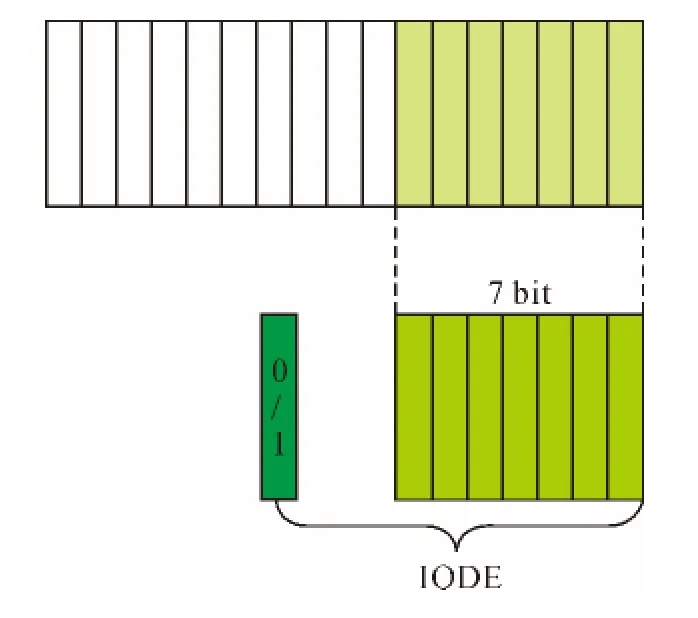
圖8 以toe的7位最低有效位作為識別參數
BDS衛星星歷存在非BDS更新間隔整數倍時刻更新的情況,可能會使相鄰歷元toe的8位最低有效位相等,見表2。針對這種情況,參考差分協議中GLONASS星歷識別方法和Galileo數據期卷的提議方法[2-3,8],考慮采用“0”/“1”+toe 的 7 位最低有效位識別衛星星歷。
參數構成思路如下:
①最低有效位
IODELSB=toe的7位最低有效位
②最高位
初始值 IODEMSB=“0”;若(IODELSB)t=(IODELSB)t0,(IODEMSB)t=ABS((IODEMSB)t0- 1);若(IODELSB)t≠ (IODELSB)t0,IODEMSB)t=(IODEMSB)t0。其中,t0指上一歷元時刻,t為當前本歷元時刻;ABS()為絕對值函數。
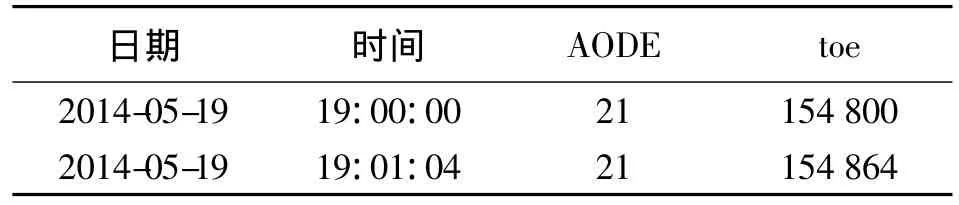
表2 BDS衛星星歷數據集在非BDS更新間隔整數倍時刻更新舉例
理論上可以在1024 s(210)內唯一標識某一歷元衛星星歷。BDS toe分辨率為8 s,因此該方法生成的識別參數分辨率為8 s,BDS衛星星歷更新間隔為(8N)(N∈N*)秒,一般取 30 min、1 h 或2 h。
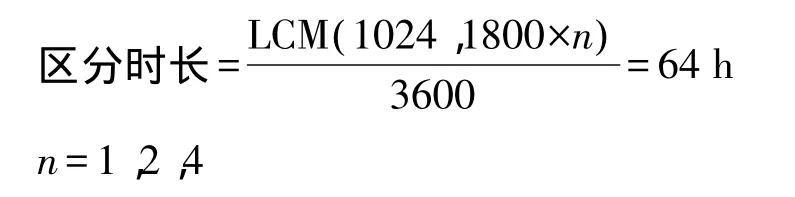
其中,LCM()為最小公倍數函數。
由上式可知,由于toe取值每周重復一次,在星歷更新間隔設為30 min、1 h或2 h時,采用該方法生成的識別參數的有效識別時間間隔為40 h,約1.5 d。與以toe的8位最低有效位作為星歷識別參數相同。
(2)采用“0”/“1”+toe的9位最低有效位作為識別參數
結合GPS CNAV和Galileo系統衛星星歷識別方法[2-3,8],考慮使用 toe 的 10 位最低有效位(LSB)作為BDS衛星星歷識別參數。
差分電文中數據齡期的定義長度為8 bit,因此僅有8 bit位于GNSS IOD數據域內。移除10 bit參數的2位最低有效位(LSB),使用剩余的8位最低有效位作為BDS衛星星歷識別參數,如圖9、圖10所示。
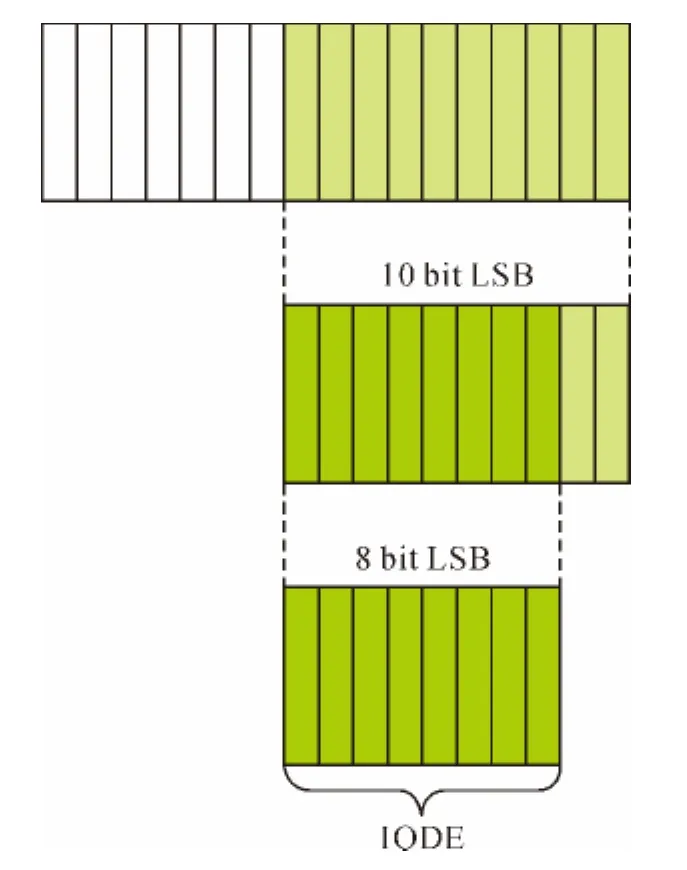
圖9 采用toe的10為最低有效位作為識別參數
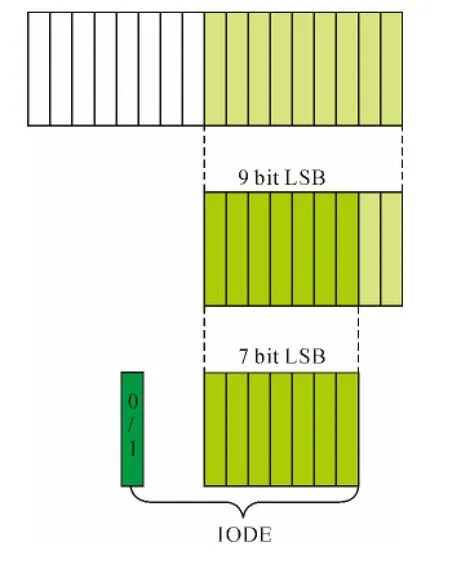
圖10 采用toe的10為最低有效位作為識別參數
同理針對相鄰歷元toe的10位最低有效位可能相等的情況,參考差分應用中GLONASS衛星星歷識別方法和RTCM SC-10402.4中關于Galileo數據齡期的提議[2-3,8],考慮采用“0”/“1”+toe 的 9 位最低有效位識別衛星星歷,詳見上一節。
理論上可以在4096 s(212)內唯一標識某一歷元衛星星歷。由于BDS toe分辨率為8 s,該方法獲得的識別參數分辨率為32 s,采用該方法生成識別參數時,星歷更新間隔可以設為(32N)(N∈N*)秒,一般取2 h。理論上可以在4096 s(212)內唯一標識某一歷元衛星星歷。

其中,LCM()為最小公倍數函數。
由于toe參數取值每周重復一次,由上式可知采用2 h的衛星星歷更新間隔時,該方法生成的識別參數可以在一周內唯一識別每一組導航電文數據。與以toe的10位最低有效位作為星歷識別參數相同。
方法2兩種思路滿足條件1)—3)。通過比較可以看出,方法2較方法1理論上有效識別時間間隔明顯增長,但是方法2參數分辨率為32 s,BDS toe分辨率為8 s,在星歷每8 s更新一次的極端情況下,其有效識別間隔會急劇縮短為16 s。此外,表2所示的衛星星歷在非BDS整時變化的情況,還有可能造成方法2兩種思路的可識別時間間隔的縮短,這是通過識別參數定義無法避免的。
3.基于AODE和toe參數生成識別參數
結合BDS衛星星歷識別參數應具備的性質,考慮基于已有星歷參數AODE和toe生成識別參數。
按照圖11所示的結構,按照如下方式進行變換:
(1)1位最低有效位
IODELSB=“1”,星歷在BDS更新間隔非整數倍時刻變化;IODELSB=“0”,星歷在BDS更新間隔整數倍時刻變化。
(2)m位最高有效位(2≤m≤5)
n=AODE二進制形式最高非零位位數,若n=0,m=2,IODEMSB=“00”;若 n=1,m=2,IODEMSB=“01”;否則,IODEMSB=DEC2BIN(AODE),2≤m=n≤5。其中,DEC2BIN()為十進制轉二進制函數。
圖11 基于AODE和toe計算衛星星歷識別參數結構組成示意圖
(3)識別參數中間位
根據toe計算天內秒數,并按照MID=DEC2BIN(INT(天內秒數/interval))計算中間位取值。其中,interval為BDS衛星星歷數據平均更新間隔,單位為s。目前BDS衛星星歷數據更新間隔為1h,interval=3600s。
若n≤2,中間數據位長 5 bit。若 MID不足5 bit,中間位的高位以“0”填充。若 n>2,中間數據位長(7-n)bit。若MID不足(7-n)bit,中間位的高位以“0”填充;若MID長度大于(7-n),取其最低(7-n)bit作為中間位。
采用該方法對實際觀測數據處理獲得的識別參數變化情況如圖12—圖14所示。
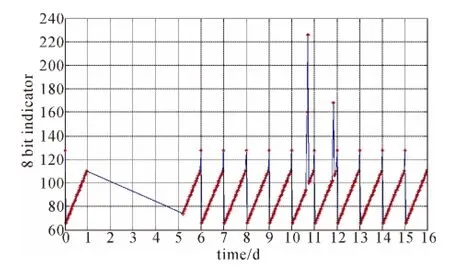
圖12 BDS GEO衛星設計參數取值隨時間變化情況(PRN 04,2014年 DOY 139~154)
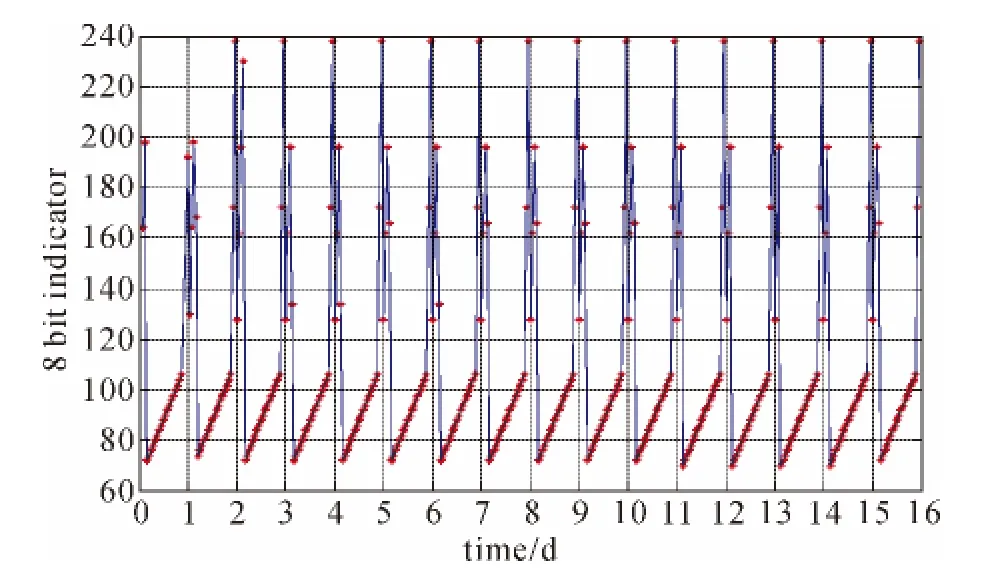
圖13 BDS IGSO衛星設計參數取值隨時間變化情況(PRN 08,2014年 DOY 139~154)
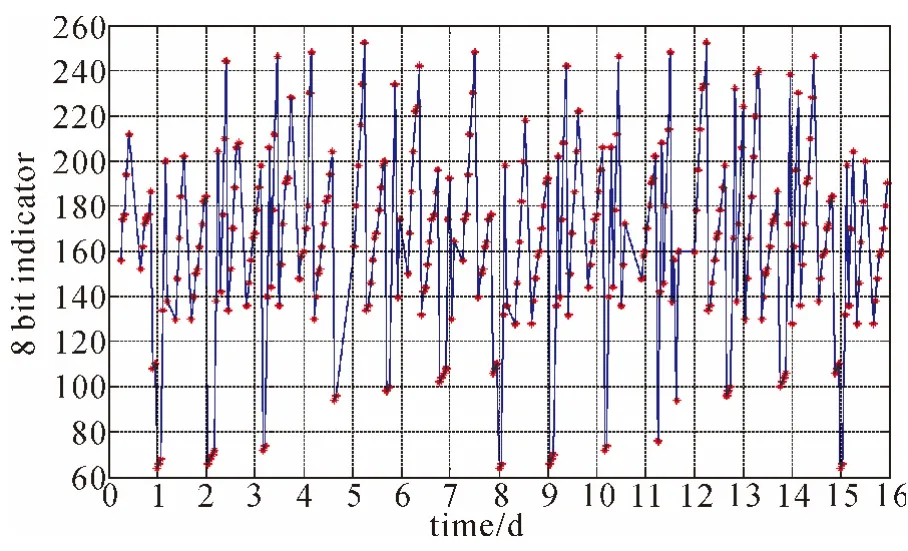
圖14 BDS MEO衛星設計參數取值隨時間變化情況(PRN 14,2014年 DOY 139~154)
由圖12—圖14可以看出,該方法獲得的識別參數可以在一天內很好地區分不同類型衛星星歷數據集的變化。此外,該方法還具有以下特點:
1)以AODE作為最高位獲得的參數可以體現出衛星星歷計算時延,即體現數據的有效性。其值越大,時延越長,數據有效性越低。
2)最低位通過判斷是否在更新間隔整數倍時刻更新判斷賦值,可以區分非更新間隔整數倍時刻數據變化。雖然分辨率不高,根據經驗,可以滿足衛星星歷的變化頻率。
3)中間位由toe計算得到的天內秒數和星歷數據更新間隔確定,使得每組數據的識別參數在一天內唯一。
4)GEO和IGSO衛星的AODE的取值變化不明顯,主要通過中間位區分數據集。而MEO衛星,AODE取值的變化很大,主要通過高位區分每組數據。
雖然方法3兩種思路滿足條件1)—4)。但是對該方法的分析是建立在現有BDS和GPS已有經驗數據的基礎上,未來BDS衛星星歷結構性質會發展成熟并發生變化,該方法也就需要進行相應的調整。此外,該方法的可識別時間段無法明確衡量。
五、結 論
綜合分析以上3種方法可以看出:①方法2和方法3在方法1的基礎上提出;②方法2參考GPS、GLONASS和Galileo系統識別參數生成方法,思路簡單,但適用性強;③方法3可以體現數據的有效性,但是對于其分析是建立在現有數據的基礎上,是否適用于衛星星歷衛星發展變化有待進一步考證。綜上,從體現性質全面性方面考慮建議采用方法3,但是從適用性方面考慮方法2更優。
[1]中國衛星導航系統管理辦公室.北斗衛星導航系統空間信號接口控制文件公開服務信號(2.0版)[S].北京:[s.n.],2013.
[2]RTCM Special Committee.Committee Draft for Vote RTCM 10402.4:Differential GNSS(Global Navigation Satellite Systems)Services,Version 2[S].[S.l.]:SC,2013.
[3]RTCM Special Committee.RTCM Recommended Standards forDifferentialGNSS(GlobalNavigation Satellite Systems)Service,Version 2.3[S].[S.l.]:SC,2001.
[4]GPS Navatar.Global Positioning System Standard Positioning Service Signal Specification(2nd Edition)[S].[S.l.]:GPS Navatar,1995.
[5]GPS Navstar JPO SMC/CZ(AFMC),Rockwell International Space Systems Division and Communations Division,International Business Machines(IBM)Federal System Company,et al.Navstar GPS Space Segment/Navigation User Interfaces[S].1993.
[6]GPS Navstar JPO SMC/CZ(AFMC).Navstar GPS Space Segment/User Segment L5 Interfaces[S].2002.
[7]Coordinate Scientific Information Center.GLONASS ICD(Version,2002,5)[S].2002.
[8]Radio Technical Commission for Maritime Service.RTCM Standard 10403.2:Differential GNSS(Global Navigation Satellite Satellite Systems)Service,Version 3[S].2013.
[9]European GNSS Supervisory Authority.Galileo O S.SIS ICD:Galileo Open Service,Signal in Space Interface Control Document Draft 1.1[S].2010.
[10]MONTENBRUCK O,STEIGENBERGER P.The BeiDou Navigation Message[J].Journal of Global Positioning Systems,2013,12(1):1-12.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56