無線測距技術在大型養路機械車間防撞中的應用研究
2015-12-17 03:52:07徐濟松高春雷王發燈孫宏方
鐵道建筑 2015年12期
關鍵詞:機械
徐濟松,高春雷,王發燈,孫宏方
(1.中國鐵道科學研究院鐵道建筑研究所,北京100081;2.朔黃鐵路發展有限責任公司原平分公司,山西原平034100)
無線測距技術在大型養路機械車間防撞中的應用研究
徐濟松1,高春雷1,王發燈1,孫宏方2
(1.中國鐵道科學研究院鐵道建筑研究所,北京100081;2.朔黃鐵路發展有限責任公司原平分公司,山西原平034100)
基于無線測距技術研發了大型養路機械車間距離預警裝置,該裝置利用無線通訊技術實現大型養路機械施工機組車間距離、標識等信息的實時共享,可有效預防同一施工區間內車間碰撞事故的發生。無線測距技術不受惡劣天氣和環境因素的影響,能滿足大型養路機械全天候作業的需求。無線通訊技術具有自動組網功能,且具有較強的組網能力,便于實現車間信息的及時共享。現場試驗表明車間距離預警裝置測距誤差<2 m,能有效降低車輛跟蹤運行和聯掛時發生碰撞的風險。
大型養路機械 車間防撞 無線測距 無線通訊
國內大型養路機械施工機組采用開天窗的模式封鎖線路進行作業。在同一施工天窗、同一區間內大型養路機械之間及與其他施工車輛間均存在碰撞風險。在封鎖區間內的作業車輛較多,同一機組的不同車型須分開一定距離,跟蹤運行,作業完成后各車型需要聯掛和編組。在視野較差和距離太短的情況下,司機發現前面的車輛后往往不能及時停車,從而發生碰撞。為防止車輛間碰撞,僅依靠施工人員監控、聯控來保證,存有安全隱患,在疲勞作業、違章作業、聯控不到位等情況下難以保證安全。
本文介紹基于無線測距技術研發的大型養路機械車間距離預警裝置。該裝置將無線測距技術與無線通訊技術相結合來有效預防大型養路機械施工機組作業時車間碰撞事故的發生。
1 無線測距技術簡介
大型養路機械車間距離預警裝置采用無線測距技術對車間距離進行測量。無線測距模塊由無線測距探測器和標簽兩部分構成,探測器接收對應的標簽返回的無線電信號,計算兩者之間的距離。具體應用時,在每套預警裝置中均安裝有一個探測器和一個標簽,在對其他標簽進行測距的同時,可被其他探測器探測。無線測距原理如圖1所示。
測距功能實現過程如圖2所示。無線測距探測器發送無線電信號到無線測距標簽,T1為無線測距探測器第1次發送信號到第1次接收到信號所經歷的時間;T2為無線測距標簽第1次接收到信號到第1次發出信號所經歷的時間;T3為無線測距探測器第2次接收信號到第2次發送信號所經歷的時間;T4為無線測距標簽第2次發送信號到第2次接收到信號所經歷的時間。則一次測量過程中,無線電波所經歷的總時間T=T1-T2+T4-T3。
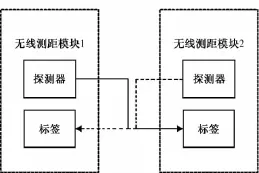
圖1 無線測距原理示意
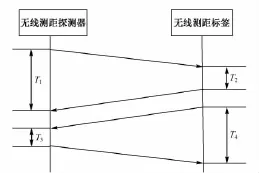
圖2 測距過程原理
無線電波在空氣中的傳播速度為光速C,經歷的路徑總長為CT,而此過程中無線電波往返了2次,所以可以得到無線測距探測器和標簽的距離為CT/4。
2 車間距離預警裝置
2.1 組成
大型養路機械車間距離預警裝置由處理單元、天線組、語聲報警裝置、PC顯示端等組成,如圖3所示。
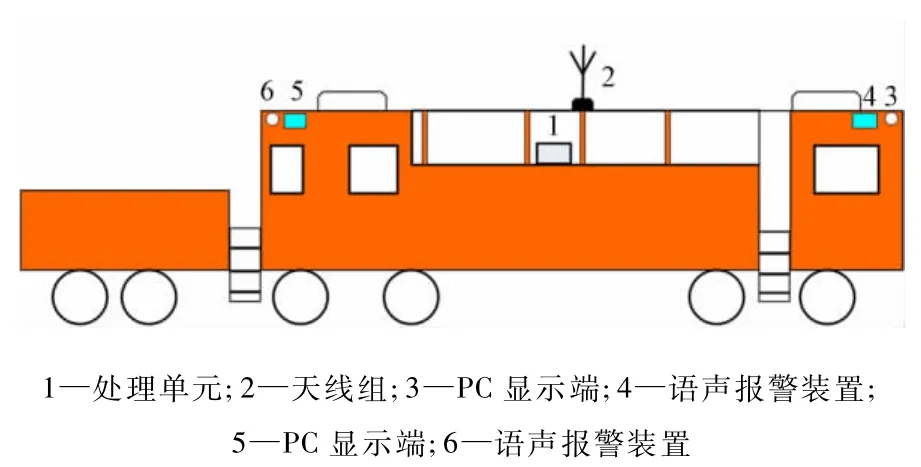
圖3 車間距離預警裝置組成示意
由2套以上(含2套)大型養路機械車間距離預警裝置組成車間防碰撞體系,如圖4所示。

圖4 車間防碰撞體系示意
多套預警裝置按一定的編組順序設定后,頭車(車1)和尾車(車n)對相鄰編號車輛進行預警,中間車輛則各自分別對前后車進行防撞預警。
2.2 性能試驗
對由車間距離預警裝置組成的車間防撞體系性能進行試驗,主要是通過系統模擬運行檢驗距離預警裝置在不同速度等級下預警的準確性和實時性。
試驗時對3套設備進行編組,前車裝載1號設備,后車裝載3號設備。動態試驗時測量車裝載2號設備以一定的試驗速度在前車與后車之間往返行駛,并實時記錄2號車距前車和后車的間距。編組方式如圖5所示。
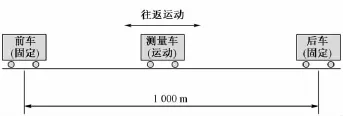
圖5系統模擬試驗示意
圖6 為不同速度下車間距測量結果對比。可見,在空曠區域試驗條件下,車間防撞體系最大工作距離>600 m,測距精度優于±2 m,能滿足大型養路機械車間跟蹤運行和聯掛的應用需求。

圖6 不同速度下車間距測量結果對比
3 應用實例
2015年8月,對安裝于“兩搗一穩”施工機組的車間距離預警裝置進行了現場測試。“兩搗一穩”施工機組由2臺DCL-32連續走行搗固車和1臺WD-320軌道動力穩定車組成。每臺車安裝1套車間距離預警裝置,組成車間防撞體系。現場測試結果見表1。
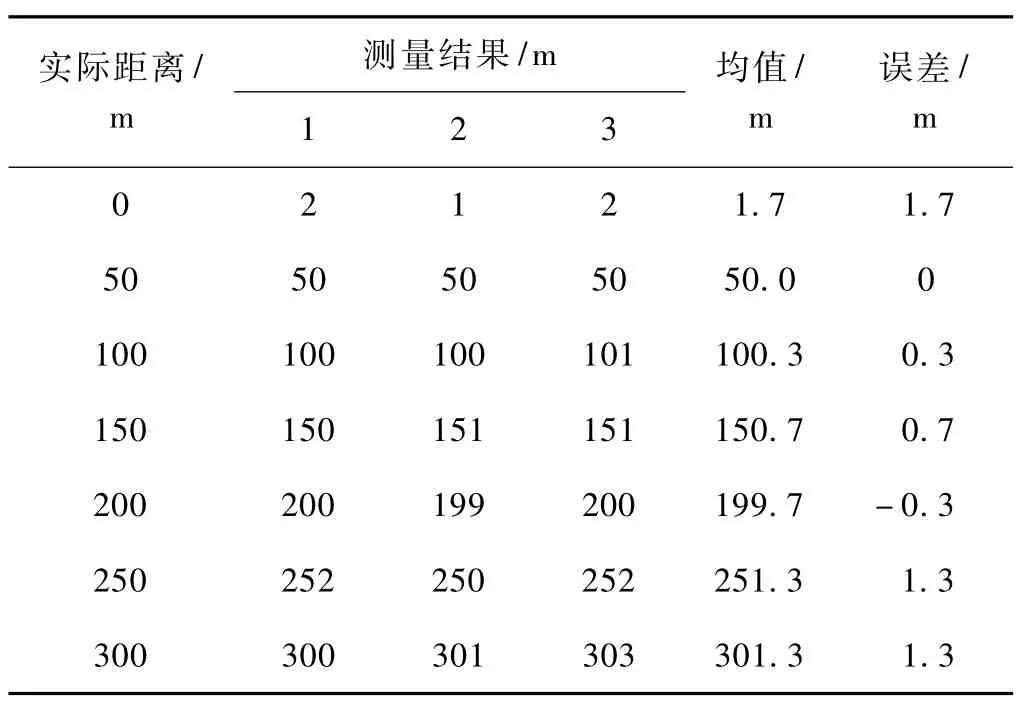
表1 現場測試結果
表1表明,由基于無線測距技術的大型養路機械車間距離預警裝置組成的車間防撞體系在空曠的線路條件下,測距誤差<2 m,能滿足車間跟蹤運行和聯掛時的防撞要求。
4 結語
基于無線測距技術研發的大型養路機械車間距離預警裝置,將無線測距與無線通訊相結合實現了車間距的測量。由該裝置組成的車間防撞體系上線自動運行,無需人工干預,能有效預防大型養路機械施工機組作業時車間碰撞事故的發生。在搗固車與穩定車組成的施工機組上進行了現場測試,驗證了無線測距技術在大型養路機械車間防撞體系中應用的可行性。
[1]蘇寶平,周剛.基于微波雷達的軌道車防撞報警系統設計[J].計算機測量與控制,2013,21(6):1648-1653.
[2]薛安林.基于無線測距技術的清篩機污土帶輔助避障系統應用研究[J].鐵道建筑,2013(6):160-164.
[3]高春雷,王發燈.清篩機污土輸送裝置避障系統的設計[J].鐵道建筑,2007(8):97-99.
[4]韓雪原,王瑞榮,段翠翠.基于Zigbee定位系統節點及測距技術研究[J].杭州電子科技大學學報,2012,32(6):157-160.
[5]梁勇.GPS衛星定位系統在軌道檢查車里程校正系統中的應用[J].鐵道建筑,2008(11):96-97.
Study on application of wireless ranging technology to avoid large machines collision
XU Jisong1,GAO Chunlei1,WANG Fadeng1,SUN Hongfang2
(1.Railway Engineering Research Institute,China Academy of Railway Sciences,Beijing 100081,China; 2.Yuanping Branch,Shuohuang Railway Development Co.Ltd.,Yuanping Shanxi 034100,China)
T he vehicle distance warning device of large maintenance machine was developed based on wireless ranging technology,which achieves real-time sharing of vehicle spacing and identification of large maintenance machine construction unit car by wireless communication technology and prevents vehicles in the same construction area frombeing collided with each other.W ireless ranging technologyis not affected bybad weather and environmental factors,which can satisfy the all-weather operation demand of large maintenance machine.T he wireless communication technology has the function of automatic networking and has strong networking ability,which could achieve real-time information sharing among vehicles.Field test showed that ranging error of vehicle distance warning device is less than 2 m,which could effectively reduce the collision risk of vehicle tracking and linking operation.
Largemaintenancemachine;Avoidinglargemachinescollision;W irelessranging;W ireless communication
U216.6;U216.9
A
10.3969/j.issn.1003-1995.2015.12.31
1003-1995(2015)12-0120-03
(責任審編李付軍)
2015-08-26;
2015-09-12
中國鐵路總公司科技研究開發計劃項目(2013G006)
徐濟松(1982—),男,助理研究員,碩士。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
