受通信延遲影響的多UUV隊形控制
2015-12-19 08:35:52馮正平
艦船科學(xué)技術(shù) 2015年2期
徐 澎,馮正平
(上海交通大學(xué) 船舶海洋與建筑工程學(xué)院,上海200240)
0 引 言
多UUV (Unmanned Underwater Vehicle)系統(tǒng)是由多個同構(gòu)或異構(gòu)的UUV 組成的具有相互協(xié)作能力的系統(tǒng)。與單個UUV 相比,多UUV 系統(tǒng)具備有搭載多樣性探測設(shè)備、空間分布廣和指令與采集數(shù)據(jù)的雙向傳輸高效等優(yōu)點。隨著水下通信、導(dǎo)航、以及控制等技術(shù)的發(fā)展,多UUV 系統(tǒng)在水下觀測或干預(yù)性作業(yè)中將發(fā)揮越來越重要的作用[1]。
隊形控制是多UUV 協(xié)調(diào)控制領(lǐng)域的一個長久以來的熱點[2-5]。群體的協(xié)調(diào)控制往往需要根據(jù)任務(wù)的性質(zhì)要求,設(shè)計相應(yīng)每個個體的控制算法,使得個體按照一定的規(guī)則運動或行為,最終使某個物理量趨于一致,比如趨于一致的速度和跟蹤同一個目標(biāo)等。這種通過局部控制,個體間信息交流,使整體實現(xiàn)共同目標(biāo)的問題稱為“一致性”問題。UUV的隊形控制和跟蹤等都可以看作是一致性問題建模與應(yīng)用的范疇[6]。有關(guān)多UUV 的一致性,最核心的目標(biāo)是設(shè)計一個合理有效的算法或協(xié)議,使得網(wǎng)絡(luò)中每個UUV 都能隨著時間的變化而逐漸達(dá)到同一狀態(tài),或取得一致性[4,7-10]。
由于電磁波在水中衰減遠(yuǎn)比聲波嚴(yán)重,多UUV系統(tǒng)只能依靠水聲通信進行協(xié)作以實現(xiàn)隊形控制。而聲波的傳播速度尤其在水中要大大低于電磁波,這樣水聲信號的通信延遲給多UUV 隊形控制帶來了較大挑戰(zhàn)。楊波等引入通信延時,證明了在通信拓?fù)溥B通的情況下,只要UUV 之間的通信時延小于某個確定的上界,分布式控制算法將使各UUV 的速度和相對位置漸近地收斂至期望的速度和隊形[11-12]。
本文采用具有位置反饋的分布式隊形控制體系結(jié)構(gòu),基于奈奎斯特穩(wěn)定判據(jù)和代數(shù)圖論給出了隊形控制器參數(shù)及其容許的統(tǒng)一時延上限,并具有良好的位置和隊形鎮(zhèn)定效果。
1 受通信約束的隊形控制算法
為簡化起見,僅考慮固定拓?fù)浜徒y(tǒng)一通信時延的情況。
假設(shè)UUV 動力學(xué)簡化為質(zhì)點,實際應(yīng)用時可以通過對其六自由度方程進行反饋線性化而得。在m維歐幾里得空間中考慮n 個質(zhì)點構(gòu)成的系統(tǒng),質(zhì)點i的動力學(xué)方程[2]:
式中:xi∈Rm為質(zhì)點i 的位置;vi∈Rm為質(zhì)點i 的速度;ui∈Rm為質(zhì)點i 的控制輸入。
考慮通信時延,這里系統(tǒng)質(zhì)點之間存在統(tǒng)一的時間延遲。多質(zhì)點系統(tǒng)隊形控制期望多個質(zhì)點按指定的速度并組成穩(wěn)定的隊形運動,分別規(guī)定期望隊形幾何中心的位置和速度為x*∈Rm和vi∈Rm,且對于每個質(zhì)點來說都已知。基于一致性協(xié)議[8],設(shè)計一個包含通信時延的分布式隊形控制算法:
式中:α >0 和γ >0 為增益系數(shù);ci∈Rm為質(zhì)點i 的期望位置。
隊形控制器(2)同時引入了通信時延τ 和位置反饋,位置反饋對系統(tǒng)的輸出有進一步鎮(zhèn)定作用,不僅可以加快質(zhì)點跟蹤期望路徑的速度,也使得跟蹤更加準(zhǔn)確。ci表示組成的質(zhì)點隊形固定。當(dāng)t→∞,xi→ci→x*,vi→v*,即質(zhì)點以期望的軌跡和速度運動。aij用來指示質(zhì)點i 和j 之間的通信鏈路狀態(tài):aij=1 則表示二者間鏈接通路有數(shù)據(jù)交換,aij=0 則表示沒有通信。Ni為質(zhì)點i 的鄰居集,即對所有質(zhì)點i 可感知的鄰居質(zhì)點j 滿足j ∈Ni。τ 反映通信時延對系統(tǒng)控制的影響。
2 與時延有關(guān)的隊形穩(wěn)定性
由無向通信拓?fù)鋵?yīng)的圖拉普拉斯矩陣整理n個子系統(tǒng),系統(tǒng)的誤差動力學(xué)方程可以表述為
根據(jù)代數(shù)圖拉普拉斯矩陣L 的對稱性,其可以轉(zhuǎn)換為一個對角矩陣。令T 為變換矩陣,那么H =TTLT 為對角矩陣并且U = diag(μ1,μ2,…,μn)。依據(jù)L 的非負(fù)定性,L 的特征值可以表示為一個升序排列0 = μ1≤μ2≤…≤μn-1≤μn。
經(jīng)過以上轉(zhuǎn)換,閉環(huán)系統(tǒng)(3)~(4)的動力學(xué)方程被解耦為n 個相互獨立的子系統(tǒng),也即

其中
且Im是m × m 單位矩陣。
方程(11)的特征方程為

也即

可以得到

這就是子系統(tǒng)i 的閉環(huán)特征方程。

簡化為

只要α >0 和γ >0,其穩(wěn)定性自然滿足。
對于其余子系統(tǒng)(i =2,…,n),方程(12)等效為

顯然第i 個隊形控制子系統(tǒng)等效為單位反饋系統(tǒng),其開環(huán)傳遞函數(shù)等效為線性系統(tǒng)Gi(s) =與通信延遲環(huán)節(jié)串聯(lián),其穩(wěn)定性可由奈奎斯特判據(jù)來分析。
由幅值穿越條件

或

其中ωc為幅值穿越頻率。

其中為表示方便,用ηi表示第i 個隊形控制子系統(tǒng)的穿越頻率,即ηi= ωc。需要指出的是α 必須滿足0 <α ≤μi,i >1。
那么穩(wěn)定性條件可以被轉(zhuǎn)化為求穿越頻率ηi下的相位裕度條件,也即

那么由以下不等式可以確定系統(tǒng)能夠承受的延遲條件

其中

是自然滿足的。
最小的滿足延遲條件的τ >0 為

那么可由上述結(jié)論歸納得出如下定理:考慮n個具有同一的雙積分動力學(xué)(1)與一個統(tǒng)一的通信延遲的質(zhì)點。假定通信拓?fù)錈o向連通,且每個質(zhì)點從它的相鄰質(zhì)點接收信息需要經(jīng)過一個恒定的延遲τ。當(dāng)τ <τ*和α ≤min{μi},i >1,隊形控制律(2)可以保證隊形穩(wěn)定,其中
式中μi為代數(shù)圖拉普拉斯矩陣L 按升序排列的第i個特征值。
3 仿真驗證
3.1 多UUV 仿真
采用參考文獻(xiàn)[13]的UUV 模型進行仿真研究且僅考慮多UUV 在水平面的隊形控制。為此對模型做了合理簡化,聚焦于水平面三自由度運動的研究。
UUV 水平面運動方程可寫為[14]

式中:M 為慣性矩陣,對稱正定,它表示運載器的質(zhì)量與水動力的附加質(zhì)量;χ =[xR,yR,ψR]T為UUV在定系中的位置坐標(biāo)及首向角;ν = [uR,vR,rR]T為在動系中UUV 的速度向量;C(ν)ν 表示由于UUV 的附加質(zhì)量,由向心力和哥氏力引起,是反對稱的;D(ν)ν 為運載器受到的阻尼等耗散力,因而D(ν)ν是正定的;g(χ)為浮力和重力引起的回復(fù)力或力矩;uc= [uc1,uc2,uc3,uc4]為UUV 水平面上4 個推進器的推力;B 為3 ×4 的輸入矩陣,其中的參數(shù)表示推力裝置的位置;Buc為推力對運載器造成的力或力矩;J(χ)為坐標(biāo)系變換矩陣,具體見式(23)。
通過對式(21)兩邊求導(dǎo)得到


同時易得

式(21)可轉(zhuǎn)化為

所以

轉(zhuǎn)化得到

根據(jù)以上推導(dǎo),采用反饋線性化控制器

定義控制作用f = [fx,fy,nr]T,則fx,fy為水平面x 和y 方向上直線運動的控制力,nr為偏航控制力矩。根據(jù)隊形控制器(2)可以實現(xiàn)fx,fy的輸出,即u =[fx,fy]T。需要注意,控制力矩nr不會改變UUV的隊形和位置。UUV 在運動方向上會受到流體偏航力矩的作用,因而導(dǎo)致UUV 的首向受擾動。為保持UUV 首向在運動過程中恒定,規(guī)定控制力矩nr= -2λrR- λ2ψR,其中λ 為正常數(shù)。那么UUV 首向閉環(huán)動力學(xué)方程整理為顯然ψR→0。
以4 個UUV 的隊形控制為例。它們的初始隊形為一個小正方形。設(shè)計一個參考點用于規(guī)劃運動軌跡,令UUV 進行一個帶直角變向的時變運動,其期望速度為v(t)= [sin(φ(t)),cos(φ(t))]。相應(yīng)地期望位移用于規(guī)定參考點速度的參數(shù)如下[10]
相對位置被規(guī)定為
定義ef= (L ?Im)(x - c)為隊形誤差,其中1 = [1 1 1 1]T。
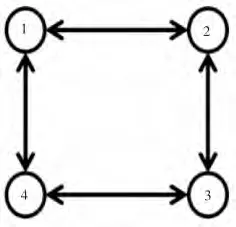
圖1 通信拓?fù)銯ig.1 Communication topology
帶統(tǒng)一通信延遲的固定通信拓?fù)淙鐖D1 所示,對應(yīng)的代數(shù)圖拉普拉斯矩陣為
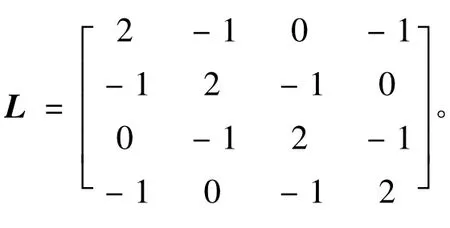
其特征值分別為0,2,2 和4。
選取α = 1 和γ = 1 ,根據(jù)定理求得可承受延遲為τ*=0.375 0 s。令時間延遲分別為τ=0,0.5τ*和τ*,仿真得到如圖2 ~圖4 所示的結(jié)果。可以看出,期望隊形迅速實現(xiàn)并保持v*的移動速度,此外隊形誤差在5 s 左右開始收斂,達(dá)到了隊形控制目的。數(shù)值仿真的結(jié)果與定理的敘述一致。
3.2 與文獻(xiàn)[12]的比較
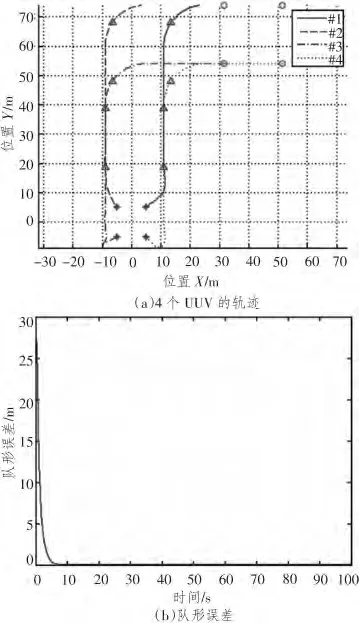
圖2 零延遲條件下仿真結(jié)果Fig.2 Simulation results under zero delay
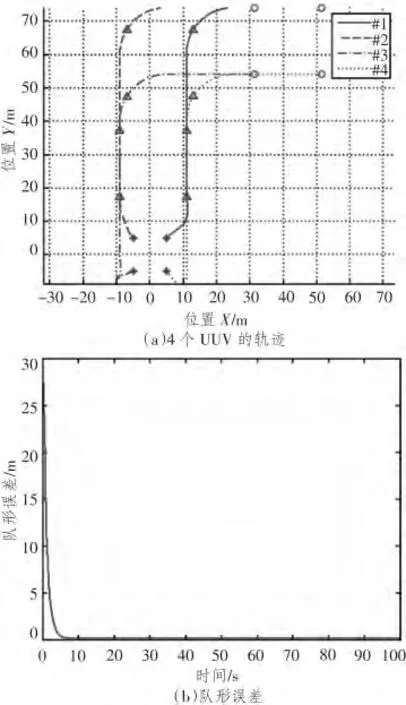
圖3 延遲τ=0.5τ* 時仿真結(jié)果Fig.3 Simulation results under delay of τ=0.5τ*
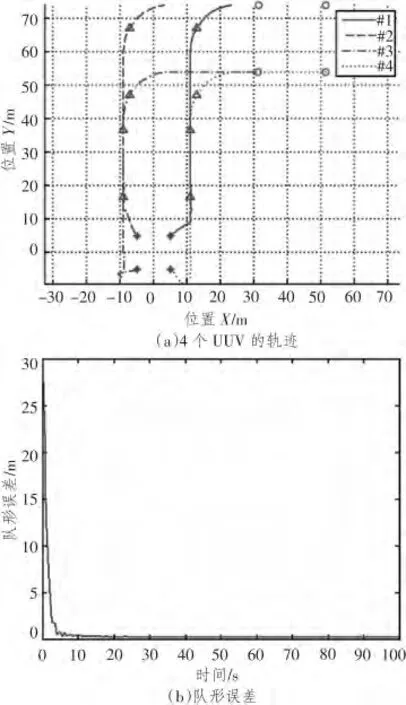
圖4 延遲τ=τ* 時仿真結(jié)果Fig.4 Simulation results under delay of τ=τ*
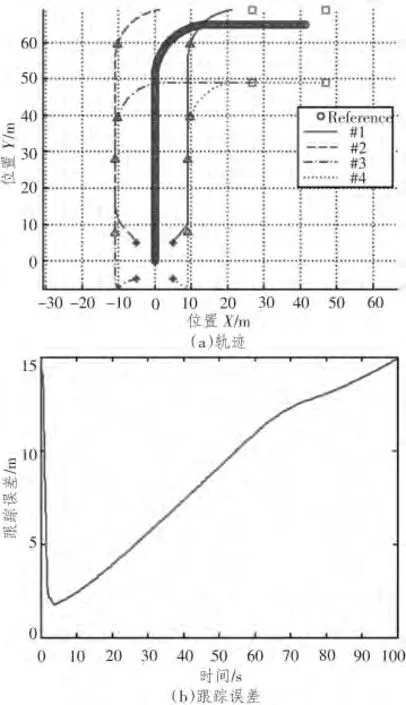
圖5 用文獻(xiàn)[12]隊形控制算法仿真結(jié)果Fig.5 Simulation results with algorithms proposed by reference[12]
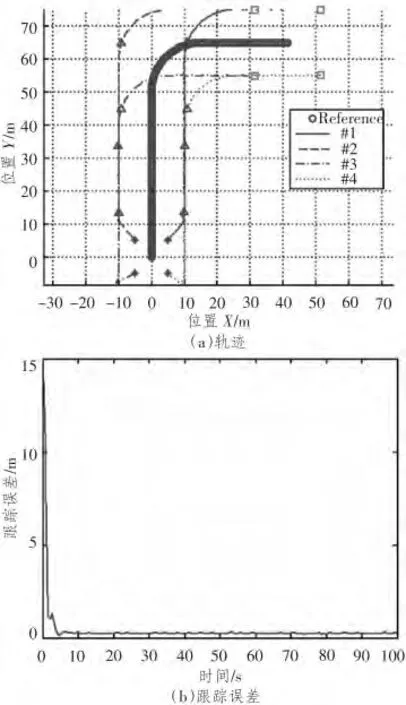
圖6 用本文隊形控制算法仿真結(jié)果Fig.6 Simulation results with algorithms proposed by this paper
做一個簡單的仿真,與文獻(xiàn)[12]所提算法在性能上進行比較,不失一般性的前提,簡化被控對象為質(zhì)點,并且令4 個質(zhì)點采用第3.1 節(jié)中的通信拓?fù)洌檯⒖键c進行一段含一個直角轉(zhuǎn)彎的軌跡運動。延時條件保持相同,即τ=0.4 s (均符合文獻(xiàn)[12]和本文所提定理,即在時延上限以內(nèi)),得到仿真結(jié)果如圖5 和圖6 所示。文獻(xiàn)[12]與本文所提方法相比雖然在隊形誤差上差別不大,但從前者的跟蹤誤差圖中可見其跟蹤誤差發(fā)散,再觀察其軌跡圖,特別在經(jīng)過直角轉(zhuǎn)彎后,隊形中心位置明顯偏離了參考點的軌跡。相反,從圖6 看出,使用本文所提隊形控制算法,跟蹤誤差可以被有效控制,具體地說,從第5 s開始跟蹤誤差便收斂到0.2 上下,顯示了優(yōu)越的軌跡跟蹤性能。而從圖6(a)中也可以觀察,隊形中心軌跡基本與參考點軌跡重合。這主要是因為本文的算法中引入了位置反饋,在要求被控對象達(dá)到期望速度的同時,使其跟蹤至相應(yīng)的參考位置,這對于探測海底指定區(qū)域等任務(wù)有著實際的意義。
4 結(jié) 語
本文利用矩陣圖論和奈奎斯特準(zhǔn)則,提出了考慮通信時延影響的分布式隊形控制算法。該算法針對所有無向通信拓?fù)涞南到y(tǒng),只要通信時延小于某個確定上界,那么所有UUV 的速度、位置和隊形將會漸近地收斂到期望值,而且,對比已有的隊形控制算法在精確跟蹤期望位置有著明顯優(yōu)勢。
[1]吳小平.多AUV 協(xié)調(diào)控制技術(shù)研究[D]. 上海:上海交通大學(xué),2008.
[2]FAX J A,MURRAY R M.Information flow and cooperative control of vehicle formations[J].Automatic Control,IEEE Transactions on,2004,49(9):1465 -1476.
[3]FENG Z,ALLEN R. Formation stabilization of underwater mobile sensing networks[C].IEEE,2009.
[4]PORFIRI M,ROBERSON D G,STILWELL D J. Tracking and formation control of multiple autonomous agents:a twolevel consensus approach[J]. Automatica,2007,43(8):1318 -1328.
[5]BIAN X,MOU C,YAN Z,et al. Formation coordinated control for multi - AUV based on spatial curve path tracking[C].IEEE,2011.
[6]BLIMAN P A,F(xiàn)ERRARI-TRECATE G.Average consensus problems in networks of agents with delayed communications[J].Automatica,2008,44(8):1985 -1995.
[7]OLFATI-SABER R.Consensus and cooperation in networked multi-agent systems[J]. Proceedings of the IEEE,2007,95(1).
[8]REN W,BEARD R W,ATKINS E M.Information consensus in multivehicle cooperative control[J]. Control Systems,IEEE,2007,27(2):71-82.
[9]SHENG L,PAN Y J,GONG X.Consensus formation control for a class of networked multiple mobile robot systems[J].Journal of Control Science and Engineering,2012.
[10]REN W. Consensus strategies for cooperative control of vehicle formations[J]. Control Theory & Applications,IET,2007,1(2):505 -512.
[11]YANG B,F(xiàn)ANG H.Forced consensus in networks of double integrator systems with delayed input[J]. Automatica,2010,46(3):629 -632.
[12]楊波,方華京.具有通信約束的分布式水下航行器群編隊控制[J]. 華中科技大學(xué)學(xué)報:自然科學(xué)版,2009,37(2):57 -60.YANG Bo,F(xiàn)ANG Hua-jing.Finite-time consensus of multiagent systems with communication constraints[J]. Journal of Huazhong University of Science and Technology(Natural Science Edition),2009,37(2):57 -60.
[13]BRAGA J M A. Control of underwater vehicles on autonomous docking maneuvers[D].Faculdade de Engenharia da Universidade do Porto,2010.
[14]WADOO S,KACHROO P.Autonomous underwater vehicles:modeling,control design and simulation[M].Califonia,2010:112-134.
