基于三次Bezier曲線逼近的邊緣亞像素定位方法
2015-12-25 11:57:28劉成志李軍成楊煉
軟件 2015年7期
劉成志++李軍成++楊煉

摘要:圖像邊緣定位是圖像處理研究的一大熱點問題,近年來,國內(nèi)外學者主要集中于對邊緣亞像素定位方法的研究。本文研究了基于三次Bezier曲線逼近的圖像邊緣亞像素定位方法。首先利用傳統(tǒng)邊緣檢測算子對邊緣點位置進行粗定位,獲得邊緣點的大致位置;然后以邊緣點為中心取若干點作為考察點,利用三次Bezier曲線去逼近所假設的邊緣函數(shù)以獲取圖像邊緣的亞像素定位。該方法通過粗、精兩次定位能較快獲得邊緣的亞像素位置,具有定位精度較高,計算速度快等優(yōu)點。
關鍵詞:三次B ezier曲線;Sobel算子;亞像素定位;精定位
中圖分類號:TP391.4
文獻標識碼:A
DOI: 10.3969/j.issn.1003-6970.2015.07.007
0 引言
在圖像邊緣定位中,常用的方法都是以像素為單位利用一階或二階微分算子進行處理,如Rebort算子、Sobel算子、Prewitt算子、LOG算子和Canny算子等。然而,隨著工業(yè)生產(chǎn)的精度越來越高,像素級的邊緣定位已無法滿足實際的需要,許多學者開始致力于邊緣亞像素定位方法的研究。目前,常用的邊緣亞像素定位方法可分為三類:矩法、插值法和擬合(逼近)法。矩法是根據(jù)圖像的空間矩、灰度矩、質(zhì)心及局部能量等保持不變的特性,通過像素灰度值和邊緣的灰度分布計算不同統(tǒng)計量來實現(xiàn)邊緣的亞像素定位。利用矩法進行邊緣亞像素定位時定位精度較高,但其主要采用模板卷積方式,導致其計算速度較慢。插值法是根據(jù)圖像邊緣附近像素點的灰度值或灰度值的導數(shù)進行插值,通過增加信息量來實現(xiàn)亞像素邊緣檢測。利用插值法進行亞像素邊緣檢測時計算速度較快,但其定位依賴于相鄰像素間的灰度值及坐標,定位精度不高。擬合(逼近)法可具體分為兩種類型:一種是根據(jù)假設的邊緣函數(shù),利用圖像邊緣灰度值擬合(逼近)邊緣函數(shù)實現(xiàn)邊緣的亞像素定位,主要有多項式擬合法、B樣條擬合法、非線性擬合法等;另一種則是根據(jù)假設的邊緣灰度值變化函數(shù),利用圖像邊緣灰度差分值擬合(逼近)邊緣變化函數(shù)來實現(xiàn)邊緣的亞像素定位,主要有二次多項式擬合法、高斯曲線擬合法等。利用擬合法進行亞像素邊緣檢測時,其定位精度較高,計算速度比矩法快。
由于擬合法在速度和精度間達到了一定的平衡,通過粗、精兩次定位可較快獲得邊緣的亞像素位置,因此是一種較為合適的邊緣亞像素定位方法。然而,目前利用擬合(逼近)法進行邊緣亞像素定位時,大多采用代數(shù)曲線作為擬合(逼近)工具,而鮮有采用參數(shù)曲線作為擬合(逼近)工具的研究。為此,本文主要研究了一種基于三次Bezier曲線逼近的邊緣亞像素定位方法。
1 基于三次Bezier曲線逼近的邊緣亞像素定位
1.1 邊緣亞像素定位的基本原理
利用三次Bezier曲線逼近進行亞像素邊緣檢測的步驟是:首先利用傳統(tǒng)邊緣檢測算子對邊緣點位置進行粗定位,獲得邊緣點的大致位置;然后以邊緣點為中心沿邊緣點方向取若干點(一般為3~4個)作為考察點;最后利用三次Bezier曲線去逼近所假設的邊緣函數(shù)或邊緣變化函數(shù),通過對三次Bezier逼近曲線求導獲取邊緣的精定位,從而實現(xiàn)圖像邊緣的亞像素定位。利用三次Bezier逼近進行亞像素邊緣檢測的基本過程如圖1所示。
1.2 邊緣的粗定位與取點
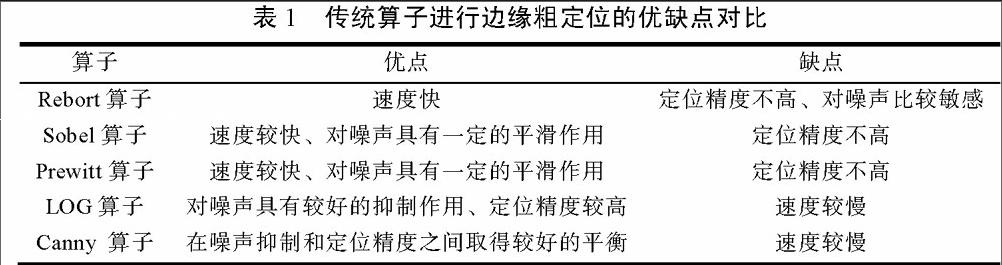
所謂邊緣的粗定位,是指利用傳統(tǒng)邊緣檢測方法確定邊緣點的大致位置。傳統(tǒng)的邊緣檢測有Rebort算子、Sobel算子、Prewitt算子、LOG算子和Canny算子等,在利用傳統(tǒng)檢測算子對邊緣進行粗定位時,其優(yōu)缺點對比如表1所示。
由表1可知,利用傳統(tǒng)檢測算子進行邊緣粗定位時,在速度、精度及噪聲抑制方面不能同時得到滿足。雖然Sobel算子對邊緣的粗定位精度不夠高,由于在空間上容易實現(xiàn),邊緣檢測效果較好且對噪聲具有一定的平滑作用,因此本文將Sobel算子選作邊緣的粗定位算子。
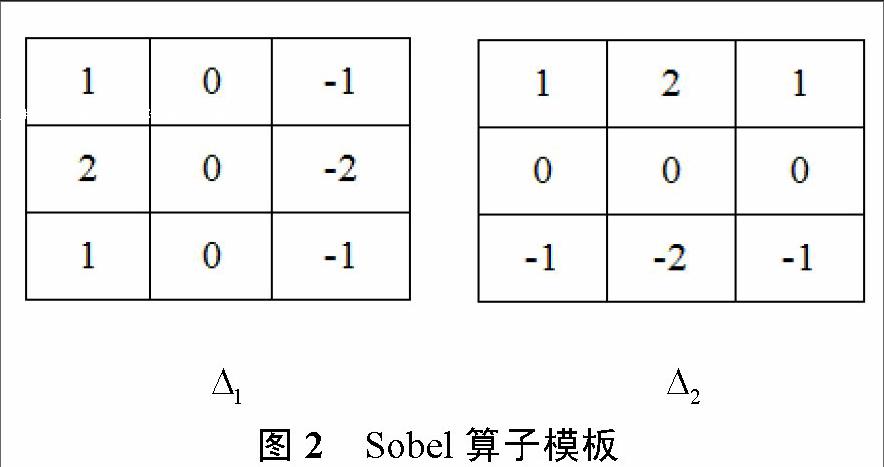
對于數(shù)字圖像f(x,y),傳統(tǒng)Sobel算子從水平和垂直兩個方向,利用像素點上下、左右鄰點的灰度加權算法,根據(jù)在邊緣點達到極值實現(xiàn)邊緣檢測,其模板如圖2所示。
適當選取某一閾值TH,當S(i,j)>TH時,將(i,j)視為邊緣點,同時也可判斷出邊緣方向。利用Sobel算子獲得粗定位邊緣像素點后,以邊緣點為中心,沿邊緣方向的兩側(cè)各拓展2個像素點,得到長度為5的邊緣灰度值向量。
1.3 基于三次Bezier曲線逼近的邊緣精定位
利用Sobel算子對一幅數(shù)字圖像的邊緣進行粗定位處理后,得到粗定位邊緣像素點所對應的灰度值向量組{G1,G2,…,Gn},對邊緣灰度值向量Gi(i=1,2,…n)作三次Bezier曲線逼近,可通過求逼近多項式的二階導來獲得精定位邊緣點。
作為一種優(yōu)秀的曲線造型工具,Bezier曲線已在諸多領域獲得了廣泛的應用。一般地,函數(shù)形式的n次Bezier曲線可表示為
其中 為給定的值。
給定連續(xù)函數(shù) 并取 ,則由式(1)定義的函數(shù)形式的n次Bezier曲線又稱為n次Bernstein多項式。由Weierstrass逼近定理可知,在區(qū)間[0,1]上可用B ernstein多項式逼近連續(xù)函數(shù)廠(t),且可達到任意精度。但由于隨著逼近精度的提高,Bernstein多項式的次數(shù)也相應提高,會存在計算不穩(wěn)定的問題,因此在實際應用中,要根據(jù)實際情況合理選擇Bernstein多項式的次數(shù)。由于是通過求逼近多項式的二階導來獲得精定位邊緣點,因此為了計算方便,本文選擇三次B ernstein多項式作為逼近函數(shù)。
當n=3時,式(1)對應的三次Bezier曲線可表示為
設某粗定位邊緣像素點的坐標為(x0,Yo),其邊緣方向為垂直方向。以x0為中心,沿垂直方向的兩側(cè)各拓展2個像素點,其水平坐標分別記為X-2,X-1與Xl,X2,并將5個邊緣像素點對應的灰度值向量記為G={g0,g1,…,g4}。
將G的分量看作是區(qū)間[o,1]上某邊緣函數(shù)f(f)在等距節(jié)點 上的取值,即滿足 。由于像素點坐標之間滿足 ,于是像素點坐標x與變量t之間滿足
由式(2)不難推導得B3(0)=P0,B3(1)=p3,于是利用三次Bezier曲線逼近f(t)時,其表達式可改寫為
下面只需確定式(4)中的P1與p2即可實現(xiàn)三次Bezier曲線B3(t)對邊緣函數(shù)f(t)的逼近。由最小二乘原理,可令
由求多元函數(shù)取極值的必要條件有式(5)改寫成矩陣形式并計算整理得方程組
將式(6)所得結果P1, P2代人式(4)即得三次Bezier曲線逼近曲線為
其中 為粗定位邊緣像素點的坐標。
同理可得沿水平邊緣方向的精定位像素點(亞像素級)坐標為
其中 為粗定位邊緣像素點的坐標。
例如,利用改進Sobel算子對256x256 (8bit)的標準Lena圖進行邊緣粗定位,其中某一邊緣點的粗定位坐標為(101,119),對應的像素灰度值為73,邊緣方向為垂直方向。以該粗定位邊緣點為中心,沿垂直方向兩側(cè)各拓展2個像素點,對應的灰度值分別為127,107,57,54,即所得邊緣灰度值向量G={127,107,73,57,54}。由式(6)計算得P1=107.6863,P2= 35.3529,將其代人式(8)可得t*=0.3607,由式(9)可得精定位像素點坐標為(x*, y*)= (100.4427,119)。
2 結語
本文提出了一種基于三次Bezier曲線逼近的圖像邊緣亞像素定位方法,通過粗、精兩次定位能較快獲得邊緣的亞像素位置,具有定位精度較高,計算速度快等優(yōu)點。此外,該方法首次采用參數(shù)曲線三次Bezier曲線作為擬合工具來逼近圖像邊緣函數(shù),研究工作具有一定的理論和實際應用價值。在今后的研究工作中,將進一步應用到圖像邊緣亞像素定位的具體實例中。