基于LQG/LTR的飛翼飛機陣風減緩系統研究
2015-12-25 09:22:06彭程王新民張斯哲陳曉
飛行力學 2015年2期
彭程,王新民,張斯哲,陳曉
(西北工業大學自動化學院,陜西西安710129)
0 引言
飛機在飛行過程中,不可避免地會受到大氣紊流的干擾。大展弦比飛翼飛機由于其高升阻比、縱向中立穩定性以及經常執行遠程、長航時飛行任務的特點,使其更加容易受到大氣紊流的影響,因此需要設計魯棒控制器,減緩陣風對飛機的影響。
線性二次型/回路傳輸恢復技術(LQG/LTR)是魯棒控制系統設計中研究較多的方法,它的控制器結構比較簡單、魯棒性好,具有很高的工程應用價值[1-7]。目前,基于LQG/LTR技術的陣風減緩系統主要存在兩個問題:(1)仿真中多使用簡單的Dryden紊流[1-3],而我國《運輸類飛機適航標準》(CCAR-25)則要求使用Von Karman大氣紊流;(2)文獻中沒有同時兼顧對飛機過載和翼根彎矩的減緩。
針對以上問題,本文首先對不能直接用于仿真的、功率譜為無理譜的Von Karman大氣紊流進行有理化,得出近似的紊流模型;然后針對飛翼飛機多操縱面的特點,把控制分配技術與陣風減緩系統結合在一起,通過優化算法將陣風減緩控制器的輸出量重新分配到各個操縱面上,使得各個舵面協調偏轉,在減緩陣風影響的同時,最大限度地降低了機翼的翼根彎矩。
1 Von Karman大氣紊流
為了提高仿真結果的逼真度和工程實用性,陣風模型為大氣擾動中最常遇到的紊流。根據CCAR-25的要求,大氣紊流采用Von Karman紊流,它比Dryden紊流更加能真實地反映大氣的紊流特性,因此只要可行,最好使用 Von Karman大氣紊流[8],其功率譜為:
由于Von karman模型為無理譜,不能直接用于飛行仿真,因此本文采用最小二乘法對原功率譜進行有理化,得到近似的有理譜,即:

設一環節為 H(jω),輸入為單位白色噪聲x(t),輸出為有色噪聲y(t)。這個能把白噪聲轉化為有色噪聲的環節稱為成形濾波器。
根據線性系統理論,并且考慮到輸入信號為單位白噪聲即PX(jω)=1,可得:

由此可見,成形濾波器可由輸出頻譜共軛分解得到。因此令PY(ω)=P^(ω),就可以得到大氣紊流的成形濾波器。
本文采用MIL-F-8785C建議的成形濾波器H(s)=M(s)/N(s),其中:

取V=150 m/s,L=760 m,σt=2 m/s,得到原紊流模型和本文所建立模型的功率譜密度曲線,如圖1所示。從圖中可以看出,兩條曲線在低頻段和高頻段都擬合較好,因此本文所建立的大氣紊流模型是可行的。
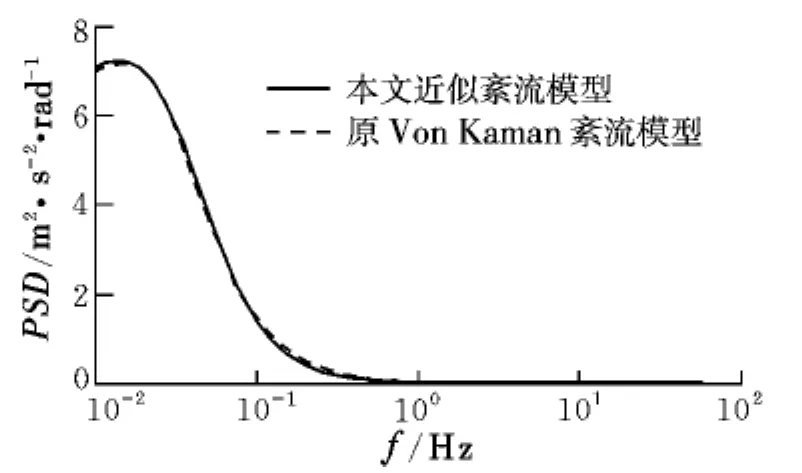
圖1 功率譜曲線Fig.1 Power spectrum
2 飛翼飛機陣風減緩系統設計
2.1 控制方案
本文中算例飛翼飛機有4對升降副翼(即舵1到舵4)和1個海貍尾俯仰控制面,如圖2所示。飛翼飛機升降副翼的氣動特性相同,只是舵效不同,這種多操縱面布局在控制系統設計上可以通過優化設計取得更好的控制效果。

圖2 樣例飛翼無人機舵面配置示意圖Fig.2 Control surface configuration of the sample flying wing UHV
本文采用直接力閉環控制方案。飛翼飛機不同于常規布局飛機,它沒有靠近重心的舵面,其升降副翼距重心較遠,會產生較大的力矩,須同時配合偏轉特定的海貍尾操縱面,來抵消升降副翼偏轉產生的附加俯仰力矩[9]。
如圖3所示,陣風減緩系統由兩部分組成:LQG/LTR控制回路和直接力產生回路。LQG/LTR控制回路利用控制器的魯棒性抑制大氣紊流對飛機的干擾;直接力產生回路反饋法向過載,產生直接力,盡最大限度抵消陣風對飛機所產生的氣動力,從而更進一步抑制陣風對飛機的干擾。

圖3 陣風減緩系統結構圖Fig.3 Structure of the gust load alleviation system
樣機由一個細長的外翼和機身組成,在外翼和機身的結合部存在一定的翼根彎矩,舵面的偏轉也會產生附加彎矩。因此在減緩過載的同時也要兼顧到翼根彎矩的減緩。本文將控制分配技術應用于彎矩減緩的控制中,通過優化算法得到最佳的控制效果。
2.2 LQG/LTR控制器設計
在實際飛行過程中,飛機受到的干擾有兩種:一是大氣紊流引起的外部擾動,嚴重時會影響飛機的穩定性,因此需要設計魯棒控制器;二是測量飛機狀態量的傳感器往往存在測量噪聲,因此需要狀態估計。
LQG控制器是從線性最優調節器(LQR)發展而來的,通過引入卡爾曼濾波器進行狀態估計,使調節器能恢復全狀態反饋時LQR控制所具有的魯棒特性。但濾波器的引入可能會顯著減小系統的穩定裕度,使系統在小擾動下即喪失穩定性。如果在控制策略中引入回路傳輸恢復技術(LTR),則可以使得LQG結構下的開環傳遞函數盡可能接近LQR問題的結果。
2.2.1 系統魯棒性的衡量
從上面的敘述中可以看出,在控制器設計時,需要先設計一個符合魯棒性要求的LQR控制器,這就涉及到多變量系統魯棒性衡量的問題。圖4為典型多輸入多輸出控制系統,系統的跟蹤誤差為:e(t)=r(t)-z(t)。

圖4 典型多變量控制系統Fig.4 Typical multi-variable control system
經過進一步推導可得系統的跟蹤誤差為[10]:

式中:S(s)=(I+GK)-1,C(s)=GK(I+GK)-1,分別為系統的靈敏度函數和補靈敏度函數。通過文獻[9]可知,為了增強系統的魯棒性,在低頻段S(s)應取小,在高頻段C(s)應取小,即S(s),C(s)的大小可以衡量系統的魯棒性。由多變量頻域控制理論[11]可知,矩陣的奇異值可以衡量矩陣的大小,因此不妨定義矩陣的最大奇異值來衡量其大小,由此可得[10]:

2.2.2 LQG/LTR控制理論
帶有干擾的飛行器縱向增廣(包含作動器)模型狀態方程為[4]:

式中:wg為陣風干擾;υ(t)為輸出信號的測量噪聲。假設wg及υ(t)均是零均值的平穩隨機過程,這樣的假設符合大氣紊流和測量噪聲的特點,其協方差矩陣為W和V。由LQG問題的分離定理知,可以獨立處理最優狀態估計和最優控制問題,然后將這兩個問題合并在一起,就可得到LQG控制器的解,因此可得LQG控制器的控制結構,如圖5所示。

圖5 LQG控制結構圖Fig.5 Structure of the LQG control system
圖中,被控對象和控制器的傳遞函數為:

LQG控制器的設計是通過獨立地求解兩個Riccati方程來實現的[4-5,9]。但實際上狀態觀測器的引入會嚴重影響控制器的穩定裕度,破壞LQR反饋控制的魯棒性。為了解決這一問題,提出了LTR技術。
令W'=q W,當q→∞ 時,可以證明LQG控制問題的開環回路增益將趨近于LQR問題的開環回路增益。

上式中q的值不應選得過大,否則會引起截斷誤差,并破壞總系統的穩定性。綜上所述,LQG/LTR控制器具體設計步驟如下[4]:
(1)設計LQR控制器,根據對系統性能和魯棒性的要求調整加權矩陣Q和R,使系統開環回路增益的奇異值曲線有滿意的形狀。
(2)應用LTR技術設計Kalman濾波器,在系統輸出端恢復回路傳遞函數。
3 控制分配算法
假設陣風減緩輸出(虛擬控制量)為η,控制分配的輸出為u,控制分配的目的就是使得f(u)=Bau-η在接近零的前提下,機翼的翼根彎矩最小,其中 u= [δ1,δ2,δ3,δ4]T。其本質是通過優化算法使得飛機的多個操縱面重新協調偏轉,在控制能力不變或接近的前提下實現控制目標。
由于飛機上沒有測量翼根彎矩的傳感器且翼根彎矩的實際求解方法也比較麻煩,不便于仿真,考慮到各個舵面所產生的滾轉力矩和引起的附加翼根彎矩是成正比的,因此本文使用各個舵面的滾轉力矩系數來估計其引起的翼根彎矩變化量。某個舵面產生的滾轉力矩為:

式中:CˉL為力矩系數。飛機的滾轉力矩是通過左右機翼兩邊的舵面差動偏轉得到的,因此單邊舵面產生的滾轉力矩為0.5Lδ。因此4個舵面的總翼根彎矩的變化量為:

考慮到飛機在巡航飛行過程中,機翼本身就有一向上的翼根彎矩M0,因此機翼的實際翼根彎矩即優化目標函數為:

實際上舵面偏轉產生的彎矩不可能大于M0,因此J>0。考慮到舵面的飽和限制,則ulow≤u≤uupp(uupp,ulow為舵面偏轉的上下限)。
綜上所述,可將控制分配寫為如下帶約束的線性規劃問題:

式中:a為一接近于零的向量,需要通過仿真確定。式(14)本質上是帶約束條件的最優問題,可通過線性規劃求解。
4 仿真結果及分析
在Matlab的Simulink中以某飛翼飛機為例進行仿真,采用飛機的小擾動仿真模型,取配平點為:高度H=2 000 m,速度V=150 m/s,紊流強度σt=2 m/s,紊流尺度L=760 m。控制分配只是對舵面偏轉量的重新分配,因此在設計LQG控制器時,可以先忽略掉控制分配模塊的存在,將飛翼飛機的5個俯仰控制面看成一個升降舵,即為虛擬控制量,作為控制分配模塊的輸入量。
圖6給出了LQR狀態反饋和利用LTR技術恢復的LQG開環奇異值曲線。由圖可知,所設計系統的低頻段開環增益大,高頻段開環增益小,符合魯棒性的要求,并且相比于LQR狀態反饋,基于LQG/LTR所設計的奇異值曲線的高頻段衰減得更快,因此恢復后系統的魯棒性要優于原狀態反饋系統,達到了設計要求。

圖6 奇異值曲線Fig.6 Curves of the singular value
圖7 給出了三種情況下法向過載的響應曲線。由圖可以明顯看出,加入陣風減緩系統后,系統的法向過載減緩了大約35.15%;加入控制分配后,減緩了大約30.55%,幾乎對控制效果沒有影響。

圖7 法向過載響應曲線Fig.7 Response of the normal load
圖8 給出了控制分配前后翼根彎矩的響應曲線。由圖可以明顯看出,加入控制分配后翼根彎矩的變化幅值得到了明顯的減緩,大約減緩了10%。
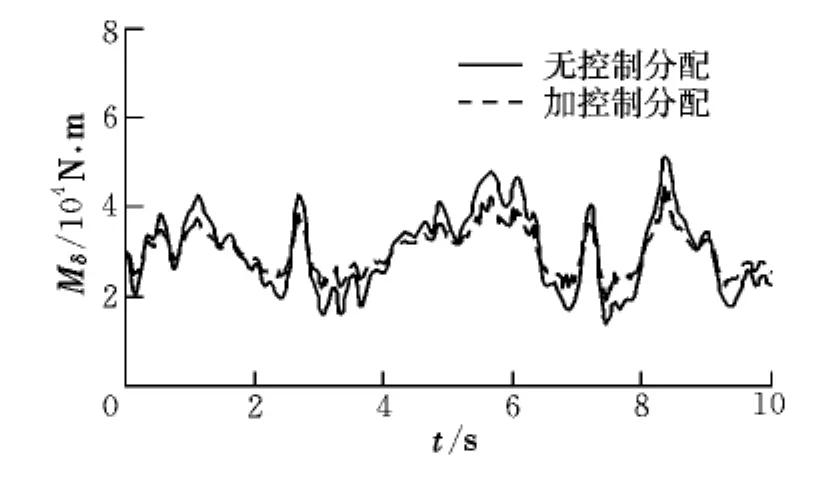
圖8 翼根彎矩響應曲線Fig.8 Response of the wing root bending moment
5 結束語
本文在傳統LQG/LTR控制器的基礎上,加入控制分配技術,對某多操縱面飛翼飛機進行了陣風減緩系統研究。Matlab仿真結果表明,運用該方法設計的陣風減緩系統不僅能夠有效地減緩陣風引起的飛機法向過載,也能夠減小飛機的翼根彎矩,減輕翼根的結構疲勞,增加飛機的使用壽命。
[1] 袁剛,李愛軍,王長青,等.多舵面大型民機陣風減緩系統設計[J].飛行力學,2011,29(4):65-67.
[2] 張軍紅,李振水,詹孟權,等.陣風載荷減緩系統LQG/LTR多變量控制器設計[J].飛行力學,2007,25(4):33-36.
[3] 錢小波.民用飛機陣風緩和控制系統的設計方法與仿真研究[D].上海:復旦大學,2011.
[4] 肖華,王立新.基于LQG/LTR方法的魯棒飛行控制系統設計[J].飛機設計,2007,27(4):39-42.
[5] 許曉燕,陳瀾.基于LQG/LTR的艦載飛機縱向自動著艦控制系統設計[J].科學技術與工程,2012,12(23):5837-5840.
[6] Dillsaver Matthew J,Cesnik Carlos E S,Kolmanovsky Ilya V.Gust load alleviation control for very flexible aircraft[C]//AIAA Atmospheric Flight Mechanics Conference.Reston:AIAA,2011.
[7] Vartio Eric,Shimko Anthony.Gust load alleviation flight control system design for a sensorcraft vehicle[C]//26th AIAA Applied Aerodynamics Conference.Reston:AIAA,2008.
[8] 文傳源.現代飛行控制[M].北京:北京航空航天大學出版社,2004:184-187.
[9] Britt Robert T,Jacobson Steven B,Arthurs Thomas D.Aeroservoelastic analysis of the B-2 bomber[J].Journal of Aircraft,2000,37(5):745-752.
[10]章衛國,李愛軍,李廣文,等.現代飛行控制系統設計[M].西安:西北工業大學出版社,2009:79-110.
[11]高黛陵,吳麒.多變量頻域控制理論[M].北京:清華大學出版社,1998:236-239.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
環球時報(2022-05-30)2022-05-30 15:16:57
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代陜西(2019年11期)2019-06-24 03:40:28
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
Coco薇(2017年5期)2017-06-05 08:53:16
