小車尋跡過(guò)程的虛擬實(shí)現(xiàn)
2015-12-25 08:01:56朱玲于穎張寶泉王麗婧陳延
軟件 2015年7期
朱玲++于穎++張寶泉++王麗婧++陳延哲
摘要:針對(duì)小車尋跡研究的傳統(tǒng)方法中存在的研發(fā)成本高、開發(fā)周期長(zhǎng)的問(wèn)題,提出了一種虛擬實(shí)現(xiàn)方法,在Visual Studi0 2010開發(fā)環(huán)境下完成對(duì)小車尋跡過(guò)程的動(dòng)態(tài)模擬。利用OpenGL對(duì)小車尋跡場(chǎng)景、小車及軌跡線進(jìn)行了虛擬建模;依據(jù)坐標(biāo)匹配的原理,實(shí)現(xiàn)小車在虛擬環(huán)境下的預(yù)設(shè)直線軌跡與曲線軌跡的尋跡仿真。意在從視覺上為機(jī)器人控制系統(tǒng)的研究提供一種動(dòng)態(tài)仿真的工具,并進(jìn)一步為控制系統(tǒng)參數(shù)調(diào)整及性能指標(biāo)的分析提供新的研究思路。
關(guān)鍵詞:虛擬現(xiàn)實(shí);場(chǎng)景建模;動(dòng)態(tài)仿真;小車尋跡;軌跡線
中圖分類號(hào):TP391.9
文獻(xiàn)標(biāo)識(shí)碼:A
DOI:10.3969/j.issn.1003-6970.2015.07.002
0 引言
小車自動(dòng)尋跡行駛是汽車智能化的一個(gè)發(fā)展方向,對(duì)無(wú)人駕駛技術(shù)的研究具有重要的意義。目前,實(shí)物小車的尋跡控制一般采用裝載于小車上的光電傳感器識(shí)別白色路面上的黑色軌跡線,借助單片機(jī)控制器對(duì)檢測(cè)信號(hào)進(jìn)行分析與處理,從而控制轉(zhuǎn)向舵機(jī)和驅(qū)動(dòng)電機(jī)實(shí)現(xiàn)小車的尋跡行駛。但是這種小車尋跡過(guò)程對(duì)周圍環(huán)境要求較高,過(guò)大的干擾會(huì)影響傳感器的感應(yīng)和信號(hào)的傳輸,尤其在無(wú)人駕駛技術(shù)研究中可能遇到復(fù)雜的路況,對(duì)被控對(duì)象的數(shù)學(xué)模型及控制算法也提出了更高的要求,需要在實(shí)際應(yīng)用前反復(fù)驗(yàn)證。由于此類研究是基于設(shè)計(jì).實(shí)驗(yàn).修改.再實(shí)驗(yàn)的多次反復(fù)模式,而有些實(shí)驗(yàn)幾乎是破壞性的,這便使得此類研究的難度更大、成本更高。因此研究一套小車尋跡過(guò)程的虛擬仿真系統(tǒng),將系統(tǒng)各方面的驗(yàn)證先通過(guò)軟件仿真的方式實(shí)現(xiàn),然后再運(yùn)用到實(shí)物小車中,必定會(huì)節(jié)約成本、提高試驗(yàn)成功率。目前針對(duì)此類問(wèn)題研究的仿真軟件多是基于Matlab的控制算法的仿真試驗(yàn),通過(guò)仿真得到的數(shù)據(jù)或數(shù)據(jù)曲線來(lái)評(píng)價(jià)算法的有效性,具有一定的抽象性,若能結(jié)合虛擬現(xiàn)實(shí)技術(shù)在視覺上虛擬小車的實(shí)際尋跡過(guò)程,再結(jié)合數(shù)據(jù)分析,那將為小車尋跡問(wèn)題甚至是未來(lái)汽車智能化研究提供一種新的實(shí)驗(yàn)方法。
本文正是在此背景下,開發(fā)了一套小車尋跡過(guò)程的可視化仿真系統(tǒng),不但能實(shí)現(xiàn)上述數(shù)學(xué)模型仿真功能,還增加了對(duì)實(shí)際環(huán)境的虛擬,可以直觀地展示小車尋跡系統(tǒng)的控制效果。
1 虛擬小車尋跡原理及實(shí)現(xiàn)方案
1.1 小車尋跡原理
本文是完全基于軟件的虛擬實(shí)物仿真,虛擬小車的尋跡原理是通過(guò)坐標(biāo)點(diǎn)匹配的方法實(shí)時(shí)地校驗(yàn)小車模型的位置坐標(biāo)點(diǎn)與虛擬空間中預(yù)設(shè)軌跡坐標(biāo)點(diǎn)的匹配情況,當(dāng)小車運(yùn)動(dòng)到指定的軌跡坐標(biāo)點(diǎn)的時(shí)候,通過(guò)程序判斷此刻小車尋跡正確,程序自動(dòng)運(yùn)行;當(dāng)小車偏離軌跡時(shí),設(shè)置程序通過(guò)坐標(biāo)偏差自動(dòng)調(diào)整小車前行方位,回到軌跡上來(lái)。
1.2 基于VS 2010的控制方案
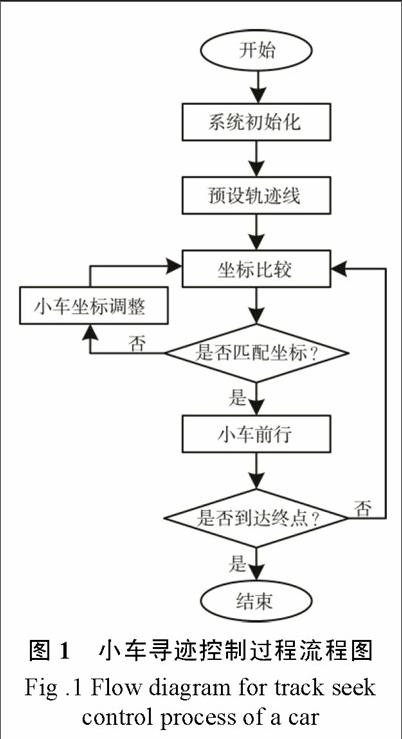
本系統(tǒng)控制任務(wù)為小車能夠按照指定軌跡運(yùn)行,實(shí)現(xiàn)自主前進(jìn)和轉(zhuǎn)彎。在VS 2010.NET環(huán)境下,利用C#語(yǔ)言編譯控制程序。程序?qū)崿F(xiàn)的的主要思路是依據(jù)坐標(biāo)匹配的尋跡原理,首先將小車模型的中心點(diǎn)設(shè)為小車位置坐標(biāo)點(diǎn),軌跡線上的坐標(biāo)點(diǎn)設(shè)為固定參考點(diǎn),利用循環(huán)語(yǔ)句,判斷小車行進(jìn)時(shí)是否與固定軌跡線上的坐標(biāo)匹配,若判斷結(jié)果為匹配則小車?yán)^續(xù)前行,若判斷結(jié)果不匹配,則通過(guò)控制算法程序依據(jù)兩者坐標(biāo)偏差校正小車位置,從而達(dá)到小車尋跡的目的。借助計(jì)算機(jī)仿真可以輕松設(shè)置各種尋跡任務(wù),不同軌跡線的尋跡原理相同,本文設(shè)置了直線軌跡GJ1和圓形曲線軌跡GJ2,在WinForm控件的任務(wù)窗口模式下,將GJ1和GJ2兩條軌跡定義為初始的文件源,小車起始位置為虛擬場(chǎng)景的坐標(biāo)原點(diǎn),程序控制方案如圖1所示。
2 小車尋跡虛擬場(chǎng)景建模
虛擬小車尋跡過(guò)程的重要環(huán)節(jié)就是編程實(shí)現(xiàn),主要包括場(chǎng)景仿真、小車建模、軌跡線繪制三部分。
2.1 仿真場(chǎng)景的建立
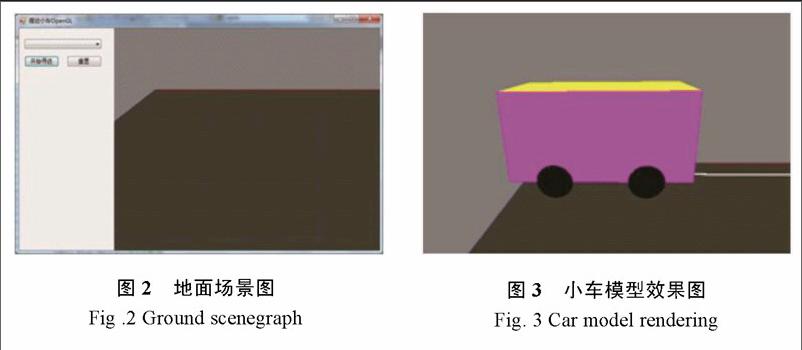
小車尋跡主要在平整地面上完成,虛擬地面位于三維空間,具有深度信息,是小車尋跡的平臺(tái)。繪制地面為空間正方形平面,四個(gè)頂點(diǎn)空間坐標(biāo)為(-lOOf, Of,-50f);(lOOf, Of,-50f);(lOOf, Of, lOOf); (-lOOf, Of, lOOf)。調(diào)用OpenGL函數(shù)GL.glColor3f(),設(shè)置當(dāng)前地面的顏色為深棕色,為了方便之后的小車尋跡,這里設(shè)置正方形地面的其中一個(gè)邊為空間坐標(biāo)系的X軸,并設(shè)置X軸為紅色,參考坐標(biāo)起點(diǎn)為(-lOOf, Of -50f),終點(diǎn)為(lOOf, Of -50f);對(duì)于Y軸,設(shè)置為綠色,默認(rèn)參考坐標(biāo)起點(diǎn)為(-lOOf, Of,-50f),終點(diǎn)為(-lOOf, 200f -50f)。仿真界面同時(shí)設(shè)有“開始尋跡”、“重置”等按鈕,用于整個(gè)虛擬系統(tǒng)的基本控制動(dòng)作。場(chǎng)景模型如圖2所示。
2.2 小車建模
小車的建模是多種多樣的,可以借助3D MAX軟件建立各種逼真的小車模型,然后將繪制好的小車導(dǎo)人到仿真環(huán)境下即可。利用OpengGL函數(shù)也可建立較為逼真的小車模型,但要比3DMAX的繪制過(guò)程更為復(fù)雜。由于本文是對(duì)虛擬小車尋跡過(guò)程的初步研究,意在為讀者提供此類問(wèn)題研究的新方法,所以本文用簡(jiǎn)單的長(zhǎng)方體模型模擬車體,并繪制簡(jiǎn)單的圓形輪胎,完成后續(xù)的尋跡演示。
首先設(shè)置長(zhǎng)方體八個(gè)頂點(diǎn)的三維坐標(biāo)及車輪中心坐標(biāo),調(diào)用OpengGL中長(zhǎng)方體及圓形繪制函數(shù)完成小車幾何模型的簡(jiǎn)單繪制。然后對(duì)此模型進(jìn)行顏色填充和光照處理,增加小車模型的立體感。經(jīng)過(guò)幾何模型的繪制和外觀渲染后,模型效果更佳逼真,如圖3所示,同時(shí)將小車調(diào)整到參考坐標(biāo)的原點(diǎn)。
2.3 軌跡線的繪制
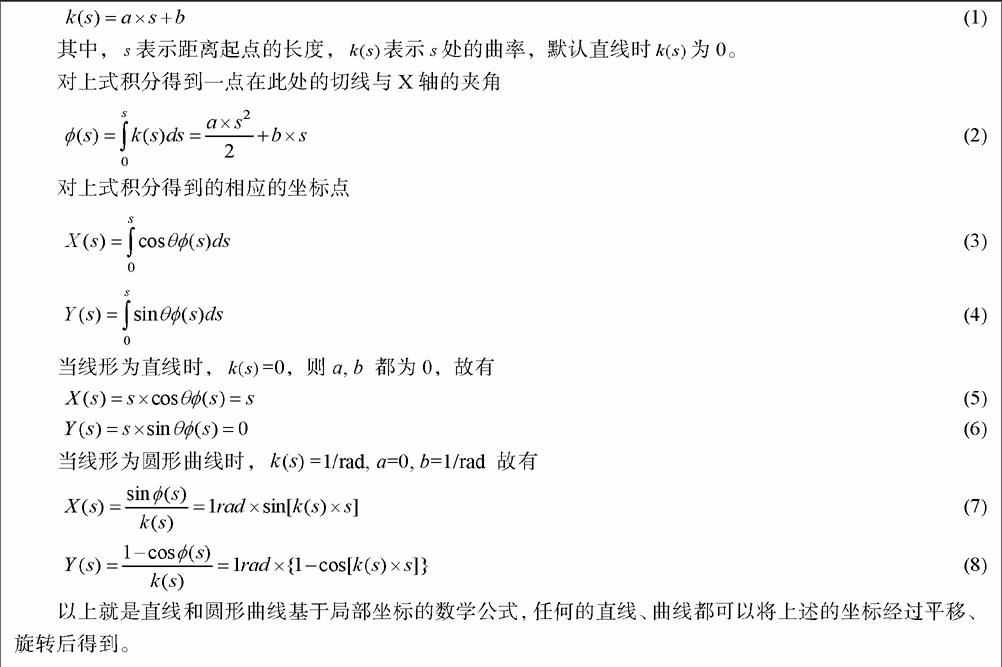
采用與路面顏色有明顯差別的線條作為小車行駛的預(yù)設(shè)軌跡線(或稱為引導(dǎo)線),尋跡小車能夠自動(dòng)檢測(cè)不同的軌跡線并自動(dòng)校正行駛偏差。本仿真系統(tǒng)設(shè)置兩種軌跡線:直線軌跡GJ1和圓形曲線軌跡GJ2。為便于觀察,將直線軌跡的繪制位置設(shè)置在X軸上,由如下數(shù)學(xué)公式生成上述兩種軌跡線:
k(s)=axs+b
(1)
其中,s表示距離起點(diǎn)的長(zhǎng)度,k(s)表示s處的曲率,默認(rèn)直線時(shí)k(s)為0。
對(duì)上式積分得到一點(diǎn)在此處的切線與X軸的夾角
對(duì)上式積分得到的相應(yīng)的坐標(biāo)點(diǎn)
當(dāng)線形為直線時(shí),k(s)=0,則a,b都為0,故有
當(dāng)線形為圓形曲線時(shí),k(s) =l/rad,a=0,b=l/rad故有
以上就是直線和圓形曲線基于局部坐標(biāo)的數(shù)學(xué)公式,任何的直線、曲線都可以將上述的坐標(biāo)經(jīng)過(guò)平移、旋轉(zhuǎn)后得到。
3 尋跡過(guò)程虛擬實(shí)現(xiàn)
選擇直線和圓形曲線兩種軌跡線,依據(jù)上述坐標(biāo)匹配的尋跡原理,即小車中心位置坐標(biāo)與預(yù)設(shè)軌跡線的坐標(biāo)的匹配情況,實(shí)現(xiàn)小車的尋跡控制。
尋跡開始前首先選擇軌跡線(引導(dǎo)線)類型,然后點(diǎn)擊左側(cè)的控制操作欄中“開始尋跡”后,虛擬小車啟動(dòng)運(yùn)行,檢測(cè)軌跡線坐標(biāo),修正小車位置坐標(biāo),直到小車到達(dá)指定終點(diǎn)位置,程序結(jié)束,小車停止在終點(diǎn)。“重置”按鈕的功能是調(diào)用控件中的終止命令,此時(shí)系統(tǒng)回到初始狀態(tài),小車回到原點(diǎn),等待新的尋跡指令。
3.1 直線軌跡的尋跡過(guò)程模擬
在對(duì)小車進(jìn)行直線尋跡控制之前,首先對(duì)坐標(biāo)匹配的步長(zhǎng)進(jìn)行設(shè)置。當(dāng)直線軌跡長(zhǎng)度為50個(gè)單位時(shí),設(shè)置其坐標(biāo)點(diǎn)的間距為5個(gè)單位,這樣可以使每一步尋跡動(dòng)作的時(shí)間適度,動(dòng)畫效果更加真實(shí)、連貫。當(dāng)小車位置參考點(diǎn)與軌跡線上的第一個(gè)坐標(biāo)點(diǎn)匹配一致的時(shí)候,利用程序判斷語(yǔ)句來(lái)控制小車的下一步運(yùn)動(dòng),保證小車沿著預(yù)設(shè)軌跡前行,圖4為小車直線尋跡的仿真效果圖。
3.2 曲線軌跡尋跡過(guò)程模擬
曲線軌跡選擇具有代表性的圓形軌跡線,從原點(diǎn)先引一條直線軌跡,在直線軌跡中段進(jìn)入圓形軌跡線,選擇小車的轉(zhuǎn)彎方向是右轉(zhuǎn)彎,計(jì)算公式為:
小車接收到曲線軌跡的尋跡指令后,運(yùn)動(dòng)小車在直線與圓的交點(diǎn)處自動(dòng)識(shí)別曲線軌跡線并駛向曲線軌道,尋跡過(guò)程的虛擬實(shí)現(xiàn)效果如圖5所示。
4 結(jié)論
基于虛擬現(xiàn)實(shí)技術(shù)實(shí)現(xiàn)了對(duì)小車尋跡過(guò)程的動(dòng)態(tài)仿真,為此類為問(wèn)題的研究提供了一種研發(fā)成本低、開發(fā)周期短,視覺表現(xiàn)力強(qiáng)、控制可靠性高的仿真平臺(tái)。由于本文尋跡控制是比較基礎(chǔ)的研究,因此還存在著虛擬場(chǎng)景單一、小車模型粗糙等問(wèn)題,可在下一步研究中結(jié)合3dmax軟件,虛擬更加符合實(shí)際車輛運(yùn)行環(huán)境的場(chǎng)景及逼真的車型。此外,可以對(duì)系統(tǒng)進(jìn)一步擴(kuò)展應(yīng)用于機(jī)器人軌跡跟蹤控制、避障控制、多機(jī)器人協(xié)調(diào)控制等的算法研究及控制效果的虛擬演示,使研究者不必花費(fèi)任何物質(zhì)資源就能夠直觀地看到抽象算法的視覺控制效果,并對(duì)真實(shí)環(huán)境可能出現(xiàn)的問(wèn)題進(jìn)行預(yù)測(cè)和處理,這不但將枯燥的理論研究轉(zhuǎn)化為鮮活的圖形圖像信息,同時(shí)也為實(shí)際系統(tǒng)的測(cè)試提供了新的解決方案,因此小車尋跡過(guò)程的虛擬具有重要的研究?jī)r(jià)值。