空空導彈動態攻擊區的高精度快速算法研究
2015-12-26 06:34:44惠耀洛陳哨東馬曉華
彈道學報 2015年2期
惠耀洛,南 英,陳哨東,馬曉華
(1.南京航空航天大學 航天學院,南京210016;2.國家光電重點實驗室,河南 洛陽471009)
空空導彈攻擊區的高精確快速計算對導彈武器系統的研制和在實戰中的應用至關重要。目前關于空空導彈攻擊區的計算方法的研究主要有快速模擬法、查表插值法和各種逼近擬合法[1]。快速模擬法[2]的主要目的是在一定程度上簡化積分方法以提高計算速度,但一般簡化的模型明顯不能滿足實戰環境的需求。查表插值法[3]需要機載計算機提前裝載大量的導彈攻擊區計算數據,在實戰時根據載機和目標的飛行參數進行一元或多元插值,然而機載計算機不可能裝載有任意飛行狀態及環境影響條件下的攻擊區數據,并且插值法本身也存在計算速度和精度的問題。在逼近擬合方法研究方面,主要有最小二乘擬合[4]、分段線性擬合[5]、BP神經網絡擬合方法[6]等,采用逼近擬合方法存在擬合多項式與擬合變量之間關系復雜、擬合系數的確定需要大量攻擊區計算數據等問題,且擬合出的多項式不能滿足擬合變量在大范圍內波動的情況。
由于實戰中隨機風場環境對空空導彈的攻擊區有重要影響[7-8],并且載機主動的飛行狀態可以對空空導彈的攻擊區進行有利機動變化[9],本文基于此,提出了一種空空導彈攻擊區計算的新方法——平移數值算法。這種方法能夠在考慮戰場任意隨機風場環境和目標機動類型的條件下,實時在線地計算出空空導彈的動態攻擊區(Dynamic Attack Zone,DAZ)。
1 問題的數學描述

式中:Rmax與Rmin分別為最大攻擊區的外邊界點與內邊界點,Mmsl為導彈總體性能模型(包括各子系統,如發動機、氣動特性、制導與控制律等);X(t)=(vγψxhzαβσωxωyωzΓφφ)為導彈飛行狀態,其中:v、γ、ψ分別為導彈的速度、軌跡傾角和軌跡偏角,x、h、z分別為導彈在經度、高度和緯度方向上的距離,α、β、σ分別為導彈迎角、側滑角和滾轉角,ωx、ωy、ωz分別為繞彈體x、y、z三軸的轉動角速度,Γ、φ、φ分別為與ωx、ωy、ωz相對應的歐拉角;Xt=(vxtvytvztxthtzt),vxt、vyt、vzt為導彈發射時刻目標的速度在地面坐標系各軸上的分量,xt、ht、zt為導彈發射時刻目標的位置坐標;Mtgt為目標總體性能模型;Stgt為目標的攻防對策(機動對策、拋射的誘餌等);ξ為隨機干擾源(如風場等)。
針對任意飛行狀態下的目標,計算空空導彈相對該目標的攻擊區Σ:
2 數學模型
數學模型包括導彈及導彈之外(如目標、隨機風場等)的模型如下。
2.1 導彈數學模型
導彈運動方程[10]:

式中:控制變量U=(δxδyδz),即導彈氣動舵偏角;導彈的系統參數Pm=(CxCyCzFpmSL),Cx、Cy、Cz分別為導彈的阻力系數、升力系數和側力系數,Fp為發動機的推力,m為導彈的質量,為導彈的質量消耗率,S為導彈的特征面積,L為導彈的特征長度;t為導彈與目標的飛行時間。
2.2 導彈制導律模型
空空導彈的制導律選用三維空間的擴展比例導引法,在地面坐標系中導彈制導指令加速度(ay,az)可表示為

式中:N、M為比例系數為導彈與目標之間距離的變化率;分別為導彈導引頭轉動角速度在地面坐標系y軸和z軸上的分量;aty、atz分別為目標加速度在地面坐標系y軸和z軸上的分量,由導引頭轉動信息濾波獲得。
2.3 目標運動方程
目標模型包括目標本身及其拋射的誘餌模型:

式中:at為目標加速 度;Stgt、as,t分別為由目 標 拋 射的誘餌的飛行狀態與加速度。
2.4 隨機風場環境模型
在導彈飛行范圍Ω內的隨機風場風速與加速度由載機上的探測器提供:

式中:vwx,vwy,vwz分別為隨機風場的速度在地面坐標系三軸方向上的分量;awx,awy,awz分別為隨機風場的分切變在地面坐標系三軸方向上的分量。本文采用的風場模型為標準風場模型[11-12]。
3 空空導彈攻擊區的計算方法
本文首先采用改進的進退法計算空空導彈在無風場干擾、無目標機動條件下的標準三維攻擊區,該算法計算精確度高,但不能滿足實時在線計算的要求。然后在計算得到的標準攻擊區的基礎上采用平移數值算法計算空空導彈在有隨機風場干擾、存在目標機動條件下的三維動態攻擊區,平移數值算法能夠滿足實時在線計算的要求,可以在實戰環境中快速準確地計算出空空導彈的動態可攻擊區。
3.1 無干擾條件下空空導彈攻擊區的精確數值計算方法
本文采用改進的進退法計算無干擾條件下空空導彈的三維攻擊區邊界值。在一維搜索中,進退法具有不易進入死循環,搜索精度高等優點。將其應用于解算空空導彈的三維攻擊區,可以明顯提高解算的準確度。進退法的基本思想是從某一點出發,按一定的步長,確定函數值呈“高-低-高”的三點。如果一個方向不成功,就退回來,再沿相反的方向尋找。由于攻擊區邊界點搜索計算的特殊性,只能以導彈命中和脫靶2種情況來確定下一步搜索的方向和位移,因此本文把進退法的思想應用于求解導彈攻擊區的邊界的同時又對其進行改進。
①搜索函數值的改進。 通過設置命中精度,對每一個搜索到的目標點,若導彈命中目標,則認為該點處函數值為0,否則為1。
②搜索步長的改進。 采用定步長與變步長相結合的方法,在一個搜索方向上,先以定步長朝一個方向搜索,達到設定條件但算法未收斂時,再以另一較小步長反向搜索。在攻擊區邊界附近采用這種步長進行搜索,可以有效提高攻擊區邊界點的搜索效率。
③搜索循環的改進。 在一般進退法的基礎上多增加一個循環,即反向搜索達到設定條件但算法仍未收斂時,再次以更小步長進行正向搜索。多增加這一循環,可以顯著提高攻擊區邊界點的搜索精度。
采用改進的進退法計算空空導彈在無干擾條件下的三維攻擊區,以遠邊界計算為例,計算前先設置導彈發射時刻的飛行參數、目標的飛行參數,在目標每一個可能的進入角和進入高度條件下,預置攻擊區的最遠邊界D(大于攻擊區最大邊界距離)和最大搜索循環次數K,計算空空導彈攻擊區的最遠邊界值。具體步驟為:
第一步,進行導彈與目標攻防對抗飛行仿真,脫靶后,最遠邊界D=D-d1,(本文選取d1=D×1.5%),再次進行導彈與目標攻防對抗飛行仿真,脫靶后,重復第一步,直至命中。
第二步,最遠邊界D=D+d2,(本文選取d2=D×0.15%),進行導彈與目標對抗飛行仿真,命中后,重復進行第二步,直至脫靶。
第三步,最遠邊界D=D-d3,(本文選取d3=D×0.015%),進行導彈與目標對抗飛行仿真,脫靶后重復第三步,直至命中或達到最大搜索循環次數K,輸出目標點位置坐標,即為攻擊區最遠邊界點。
同理,計算空空導彈最大攻擊區的內邊界時,只需將D預置為小于空空導彈的攻擊區最小邊界距離的數值,同時d1、d2、d3取值為負。
3.2 在隨機環境中空空導彈動態攻擊區的實時在線數值計算方法
本文采用平移數值算法計算在隨機風場干擾和目標機動條件下空空導彈的三維動態攻擊區。為論證本文所提平移數值算法的正確性和有效性,先進行了導彈與目標的攻防對抗彈道仿真研究,研究導彈打擊攻擊區邊界附近目標時彈道曲線的變化。
算例論證:假設導彈與目標在不同高度飛行,目標作U型機動。導彈初始位置坐標(0,10km,0),目標位置:xt=46km,ht=12km,zt=0,初始速度均為300m/s,彈道仿真曲線如圖1(a)中實線所示。設置目標坐標(xt,ht,zt)分別為(46km×0.95,12km,0)和(46km×1.05,12km,0),彈道仿真曲線如圖1(a)中點劃線和虛劃線所示。目標位置變化后的彈道曲線與原彈道曲線的偏差如圖1(b)和圖1(c)所示。目標初始位置移近和移遠后的彈道曲線與原彈道曲線的偏差分別如圖1(b)和圖1(c)中實線和虛線所示。
由圖1可知,對于12km高度處作U型機動的目標,當目標初始位置存在-5%的偏差時,最大彈道傾角偏差為0.38°,最大彈道偏角偏差為0.32°,平均彈道傾角百分比誤差為5.26%,平均彈道偏角百分比誤差為0.53%。當目標初始位置存在5%的偏差時,最大彈道傾角偏差為0.29°,最大彈道偏角偏差為0.3°,平均彈道傾角百分比誤差為4.8%,平均彈道偏角百分比誤差為0.62%。可近似認為彈道無偏。需要指出,對于與導彈等高度、不機動的目標,如果目標相對導彈的距離有所偏移,則導彈的彈道曲線偏差將更小。
基于上述彈道研究發現,導彈打擊位于最大攻擊區附近的目標時,導彈的彈道基本無偏。因此可以首先用精確方法計算出空空導彈在目標不機動、無風場影響條件下的標準攻擊區,作為初始數據裝載入機。然后在實戰環境中,根據目標機動類型和載機測量得到的風場數據,采用基于標準攻擊區的平移數值算法,實時在線計算導彈的三維動態攻擊區范圍。

圖1 導彈打擊攻擊區附近目標的彈道曲線及彈道偏差
平移數值算法的具體計算步驟:設在某一具體目標高度和目標進入角下,在目標不機動、無風場影響條件下的空空導彈最大攻擊區的遠(近)邊界為D,設置目標機動類型和隨機風場環境模型,將攻擊區遠(近)邊界擴大(縮小),進行導彈與目標攻防對抗飛行仿真,導彈脫靶后,平移目標飛行軌跡,使目標末端坐標與導彈末端坐標重合,則平移后的目標初端坐標位置即為導彈在該實際飛行條件下的動態攻擊區的最遠(近)邊界點。
標準攻擊區的縮放倍數F值設置要求:當目標位于縮放后的攻擊區邊界進行彈目飛行對抗仿真時,導彈脫靶,同時縮放倍數應該適宜。如果F值過小,即目標位置稍微偏離標準攻擊區邊界,加入目標機動和隨機風場作用時,導彈很可能命中目標,此時不能使用平移法求解攻擊區邊界點;如果F值過大,即目標位置遠離標準攻擊區邊界,由于導彈的彈道曲線偏差隨飛行時間累積而增大,將造成精確度的下降。同時由于對不同高度、不同進入角下的目標位置,最佳F值也不同,因此采用動態選取F值的方法。先預測實際攻擊區比原攻擊區邊界增大還是縮小,如果實際攻擊區邊界比原邊界增大,F取正值,否則F取負值。先將F選為較小的數值(本文選取F=0.01),將標準攻擊區邊界擴大(縮小)F倍,進行導彈與目標的攻防對抗飛行仿真,如果導彈脫靶,可直接進行坐標平移變換求取實際攻擊區邊界點,如果導彈命中,則在縮放的基礎上繼續擴大(縮小)直至導彈脫靶。
采用平移數值算法實時在線計算空空導彈在隨機風場干擾和目標對抗機動條件下的三維動態攻擊區,計算流程如圖2所示,其中T0、TF、MF分別為導彈和目標飛行對抗仿真時目標的初始坐標、目標的末端坐標和導彈的末端坐標。
圖2 采用平移數值算法計算空空導彈動態攻擊區流程圖
4 數值仿真與分析
1)算例1。
設置風場類型:風速為最大平均風速的0.5倍(10km高度處風速約為30m/s),風向沿x軸正方向,即導彈順風飛行。目標不機動。設置導彈初始位置坐標為(0,10km,0),導彈和目標初始速度均為300m/s。
在該風場條件下,目標不機動時,10km高度處動態攻擊區遠邊界(Rmax)隨目標進入角(ν)的變化關系如圖3(a)所示,其中虛線為采用改進的進退法計算結果,實線為采用平移數值算法的計算結果。三維動態攻擊區的遠邊界曲面如圖3(b)所示,其中實線網格曲面為采用改進的進退法計算結果,虛線網格曲面為采用平移數值算法計算結果。
圖3 導彈順風飛行且目標不機動時導彈三維飛行彈道及攻擊區遠邊界
由圖3(a)知,在該風場條件下,目標不機動時,導彈攻擊區呈對稱分布,由于導彈順風飛行,導彈攻擊區最遠邊界距離為64.6km,比無風時的62km增加了4.19%。在同一目標進入角下,2種算法所得攻擊區最遠邊界的距離偏差為0.1km,百分比偏差為0.15%,由圖3(b)知,攻擊區遠邊界距離隨目標高度增加而下降,在目標高度為4~8km時下降比較平緩,在目標高度為8~15km時,攻擊區遠邊界距離迅速下降,由于高度引起的攻擊區遠邊界最大距離差為49km。采用2種計算方法所得三維攻擊區的最大攻擊曲面基本重合,滿足工程應用要求。
2)算例2。
設置風場類型:風速為最大平均風速(10km高度處風速約為60m/s),風向與x軸負向和z軸正向均成45°角,即導彈迎側風飛行。目標U型機動。設置導彈初始位置坐標為(0,10km,0),導彈和目標初始速度均為300m/s。
在該風場條件下,目標U型機動時,8km高度處動態攻擊區遠邊界(Rmax)隨目標進入角(ν)的變化關系如圖4(a)所示。三維動態攻擊區的遠邊界曲面如圖4(b)所示,其中實線網格曲面為采用改進的進退法的計算結果,虛線網格曲面為采用平移數值算法的計算結果。
圖4 導彈迎側風飛行且目標U型機動時導彈三維飛行彈道及攻擊區遠邊界
由圖4(a)可知,在該風場條件下,目標U型機動時,導彈的攻擊區邊界偏移角度約為25°。8km高度處,導彈的攻擊區遠邊界距離最大值為67km,比目標不機動、無風場影響時的74km減小了9.46%。在同一目標進入角下,2種算法所得攻擊區最遠邊界的距離偏差為0.2km,百分比偏差為0.3%。由圖4(b)知,由于高度引起的攻擊區遠邊界最大距離差為41km。采用2種計算方法所得三維攻擊區的最大攻擊曲面基本重合,滿足工程應用要求。
為驗證平移數值算法計算的快速性,將其與黃金分割法計算的速度進行對比。結果表明,平移數值算法計算的速度遠遠大于后者,攻擊區邊界點搜索過程中部分搜索循環計算次數對比如表1所示,表中h0和ht0分別為導彈和目標的初始飛行高度,v0和vt0分別為導彈和目標的初始飛行速度,ntmax為目標的最大可用過載,ν為目標進入角,N1和N2分別為使用黃金分割法和平移數值算法進行迭代求解的循環次數。
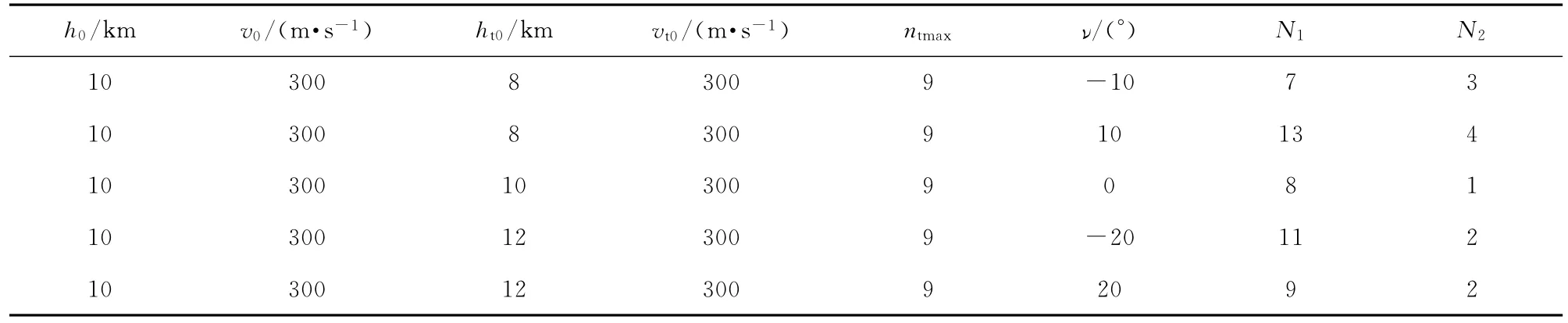
表1 平移數值算法與黃金分割法部分循環計算次數對比
由以上數值仿真,可以看出采用該平移數值算法計算空空導彈的攻擊區具有以下優點:
①計算的快速性,能夠滿足實時在線解算的要求。傳統計算導彈的攻擊區需要使用諸如黃金分割法等一維搜索算法,經過多次迭代搜索攻擊區的邊界點,直至找到導彈命中目標的臨界點為止,耗時時間長;采用平移數值算法,只需將標準攻擊區適當縮放后,經過一次或幾次(縮放不合適)彈道解算,就能得到攻擊區的邊界點位置坐標。
②計算的準確性,精度達到工程應用的要求。使用一維搜索算法存在搜索誤差,采用快速模擬法會引入對象模型偏差,而如果已知導彈的無干擾條件下的標準攻擊區數據表,使用該平移數值算法,就能夠高精度地解算出在隨機風場環境和目標機動影響下的導彈的動態攻擊區,且該飛行仿真可以使用六自由度導彈和目標飛行對抗模型,因此具有更高的計算精確度。彈的攻擊區,具有高精度、快速實時在線的特點,能夠滿足實際工程應用要求,可以為火控系統的改進提供科學參考。
5 結束語
本文首先論證了導彈打擊攻擊區邊界附近的目標時,導彈彈道近似無偏。進而用改進的進退法計算得到在無干擾條件下的導彈三維攻擊區,然后采用平移數值算法計算了存在隨機風場干擾和目標機動對抗條件下的導彈三維動態攻擊區。大規模飛行仿真結果表明,該平移數值算法可以有效計算空空導彈的動態攻擊區,同時也可用于計算其它類型導
[1]易華,謝希權.基于自適應模糊系統的多目標導彈攻擊區解算[J].系統工程與電子技術,2002,24(1):45-47.YI Hua,XIE Xi-quan.Algorithm for the missile launching envelope in multi-target attacking based on the adaptive fuzzy system[J].Systems Engineering and Electronics,2002,24(1):45-47.(in Chinese)
[2]劉代軍,高曉光,李言俊,等.中遠程空空導彈允許攻擊區的快速模擬算法[J].西北工業大學學報,1999,17(4):530-533.LIU Dai-jun,GAO Xiao-guang,LI Yan-jun,et al.A fast simulation algorithm for calculating the allowable attack area for air-to-air missiles[J].Journal of Northwestern Polytechnical University,1999,17(4):530-533.(in Chinese)
[3]王宏倫,佟明安.空空導彈攻擊區處理的擬合——插值法[J].火力與指揮控制,1998,23(4):14-18.WANG Hong-lun,TONG Ming-an.A hybrid method of least square fit and interpolation used in the approximation of air-toair missile launch envelopes[J].Fire Control &Command Control,1998,23(4):14-18.(in Chinese)
[4]張列航,雷蕾,楊長啟.中程空空導彈攻擊區仿真與擬合[J].航空科學技術,2010(4):25-27.ZHANG Lie-hang,LEI Lei,YANG Chang-qi.Attack area calculating and data fitting for medium air-to-air missile[J].Aeronautical Science & Technology,2010(4):25-27.(in Chinese)
[5]雷科,林忠賢.制導炸彈攻擊區擬合算法研究[J].電光與控制,2013,20(2):85-88.LEI Ke,LIN Zhong-xian.A fitting algorithm for calculating at-tack envelope of guided bombs[J].Electronics Optics & Control,2013,20(2):85-88.(in Chinese)
[6]黃國強,南英,陳芳.基于BP神經網絡的有控炸彈攻擊區擬合分析[J].彈箭與制導學報,2009,29(3):217-220.HUANG Guo-qiang,NAN Ying,CHEN Fang.Attack zone fitting and Matlab simulation of guided-bomb based on BP neural network[J].Journal of Projectiles,Rockets,Missiles and Guidance,2009,29(3):217-220.(in Chinese)
[7]黃國強,南英,陳芳,等.考慮各種隨機干擾源有控炸彈攻擊區及彈道仿真研究[J].彈箭與制導學報,2009,29(5):193-196.HUANG Guo-qiang,NAN Ying,CHEN Fang,et al.Attack zone and trajectory simulation of guided-bomb considering many kinds of stochastic interference source[J].Journal of Projectiles,Rockets,Missiles and Guidance,2009,29(5):193-196.(in Chinese)
[8]吳勝亮,南英,黃國強,等.隨機風場與升阻比誤差對空空導彈攻擊區的敏感度研究[J].彈道學報,2012,24(2):25-30.WU Sheng-liang,NAN Ying,HUANG Guo-qiang,et al.Attack zone sensitivity of air-to-air missile caused by random wind and error of lift-drag ratio[J].Journal of Ballistics,2012,24(2):25-30.(in Chinese)
[9]黃國強,南英,陳芳.無動力滑翔彈最優拋射初始條件研究[J].飛行力學,2009,27(1):93-95.HUANG Guo-qiang,NAN Ying,CHEN Fang.Optimal release conditions of no-power gliding bomb[J].Flight Dynamics,2009,27(1):93-95.(in Chinese)
[10]錢杏芳,林瑞雄,趙亞男.導彈飛行力學[M].北京:北京理工大學出版社,2000.QIAN Xing-fang,LIN Rui-xiong,ZHAO Ya-nan.Missile flight mechanics[M].Beijing:Beijing Institude of Technology Press,2000.(in Chinese)
[11]LINDZEN R S.Turbulence and stress owing to gravity wave and tidal breakdown[J].Journal of Geophysical Research,1981,86(C10):9 707-9 714.
[12]YU Yong-hui.A numerical model characterizing internal gravity wave propagation into the upper atmosphere[J].Advances in Space Research,2009,44(7):836-846.