基于部件分解的高分辨雷達目標提取方法
2015-12-28 01:03:52段佳,吳億鋒,張磊等
電波科學學報 2015年4期
基于部件分解的高分辨雷達目標提取方法
段佳吳億鋒張磊邢孟道 黃大榮吳敏
(西安電子科技大學 雷達信號處理國家重點實驗室,陜西 西安 710071)
摘要針對傳統目標提取算法在低信噪比條件下性能不理想且提取部件不連續的問題,提出一種基于部件分解的高分辨雷達目標提取算法. 利用屬性散射中心可以表征目標部件的散射回波的優勢,通過構造屬性散射中心基對目標信號進行分解. 通過對分解部件的能量設置門限,提取屬于目標的部件. 實驗結果證明:在低信噪比且虛警概率相同的情況下,基于部件分解的目標提取方法比傳統基于像素能量的提取方法能提取出更多且更連續的目標部件.
關鍵詞雷達目標提取;目標分解;屬性散射中心;恒虛警率
中圖分類號TN929.5
文獻標志碼A
文章編號1005-0388(2015)04-0679-07
AbstractIn order to overcome the problems encountered by traditional radar target extracting method, a radar target extracting method based on the decompositions of assemblies is proposed for high-resolution radar images. Since the attributed scattering center model is capable to represent the electro-magnetic behaviors of manmade assemblies, it is advisable to decompose the radar signal into assemblies. Then, by setting a constant-false-alarm-rate threshold to the energy of decomposed assemblies, assemblies belonging to the target are determined. Experimental results validate the superiority of the proposal over the traditional method under low signal-to-noise ratio environment with same constant-false-alarm-rate probabilities. Moreover, the integrities of assemblies is enhanced.
收稿日期:2014-09-16
作者簡介
A target extracting method based on decomposition of
components for high-resolution radar images
DUAN JiaWU YifengZHANG LeiXING MengdaoHUANG DarongWU Min
(NationalKeyLaboratoryofRadarSignalProcessing,XidianUniversity,
Xi’anShaanxi710071,China)
Key words rdar target extraction; target decomposition; attributed scattering centers; constant-false-alarm-rate (CFAR)
資助項目: 國家自然科學基金(61301280); 國家自然科學優秀青年基金(61222108); "973"項目(2010CB731903); 國家自然科學青年基金(61101245)
聯系人: 段 佳 E-mail: bifiduan119@126.com
引言
雷達目標提取技術對雷達信號處理至關重要,它是雷達目標識別、分類和特征提取等工作的前提. 在實際電磁環境中,雷達接收目標回波復雜,來自太空和地面的電磁干擾嚴重污染目標信號. 雷達目標提取技術是指從復雜的電磁背景環境中提取出目標信號. 對于傳統低分辨雷達,雷達目標由少數散射點組成[1],采用基于像素能量的恒虛警(Constant-False-Alarm Ratio,CFAR)提取算法即可有效地分離目標和背景[2]. 但隨著雷達技術的發展,現代高分辨雷達通過發射長相干積累時間和寬帶寬的信號提高分辨率[3],從而獲取更多的目標信息. 但高分辨率也給目標提取帶來了困難:由于目標由多個散射點組成,回波能量分散,單個分辨單元內的信號信噪比低,傳統的基于像素能量的CFAR提取方法效果不理想.
利用同一部件像素之間具有相關性,本文提出一種基于部件級分解的雷達目標提取算法.主要針對衛星、飛機、坦克和車輛等人造目標,這些目標往往由簡單的部件組成,例如圓柱、球、平面和二面角等.而這些基本部件的雷達散射回波信號可以從幾何繞射和物理光學的角度進行預測[4]. 例如,屬性散射中心模型便可通過少量參數的不同組合來表征不同部件的電磁散射回波[5]. 基于屬性散射中心模型對雷達目標信號進行部件級分解,然后通過對提取部件的能量設置門限可有效區分目標部件和噪聲及背景雜波. 與傳統基于像素能量的目標提取算法[6]不同,基于部件能量的目標提取算法可以更有效地區分噪聲和弱的分布式散射部件. 這是因為,噪聲隨機分布在雷達圖像上,噪聲像素之間不具有相關性,而目標部件的像素之間具有相關性,對目標進行部件級的分解可有效地區分噪聲和雷達目標部件. 另外,一些分布式散射部件在雷達圖像上往往占據一些像素,這些像素能量較低但部件整體能量高,因此通過對部件整體的能量進行CFAR提取便能有效地提取此類散射部件. 實驗證明,在低信噪比且虛警門限相同的情況下,基于部件能量的目標提取算法能提取出更多更連續的部件.
1信號模型
對于部件的模型,已有學者從電磁散射特性出發建立了典型部件的參數化模型. 典型的電磁散射參數化模型包括指數衰減模型[7]、幾何繞射模型[8]和屬性散射中心模型[4]. 其中,屬性散射中心模型從幾何繞射和物理光學的角度出發,用一組參數表示形如球、圓柱、二面角、三面角和邊緣繞射等基本電磁散射部件. 本文采用屬性散射中心模型對雷達目標進行部件級分解.
結合雷達實際工作條件,對屬性散射中心模型進行化簡以減少運算量、提高算法效率[9],簡化后的屬性散射中心模型為

(1)

假設目標由P個屬性散射中心組成,則目標回波信號可以表示為
e(f,φ).
(2)
式中: S(f,φ)表示帶噪聲的雷達目標總回波信號; e(f,φ)表示加性高斯白噪聲.
2高分辨雷達目標提取技術
傳統目標提取算法認為目標是由若干個散射點構成,通過對像素能量設置門限提取目標,忽略了部件像素之間的整體性.在低信噪比的條件下,強噪聲隨機分布于各像素,分布式散射部件規律分布于一些像素,容易被強噪聲淹沒,導致傳統的目標提取算法效果不理想.若將目標視為若干部件的組合,而部件像素間具有相關性,對目標進行部件級分解能有效提高在低信噪比下目標與噪聲的可分性.
2.1基于部件的目標信號分解
(3)
Θp={Lp,φ0p,xp,yp}.采用傳統的RELAX迭代算法[10]可以很好地求解如式(3)的參數估計問題,但是由于參數估計維度高運算復雜,需提出一種改進的參數估計求解算法以提高效率.
注意到,屬性散射中心的相位表示與點散射模型一致,因此可采用傅里葉變換(FourierTransform,
FT)對位置參數進行快速求解.
首先,構造新的不含相位的基函數,形如
(4)



(5)
利用迭代方法快速估計參數的具體流程如下:


重復上述操作,迭代至收斂. 收斂條件為相鄰兩次估計信號的能量差小于預設門限,一般為原始信號能量的1%.
在多通道極化數據已知的情況下,可以聯合極化通道進行參數估計. 由于各極化通道下的屬性參數{L,φ0,x,y}相同,差別僅在幅度,因此可聯合多極化通道進一步提高參數估計精度. 參考已有文獻,聯合多通道參數估計只需將式(5)的l1范數替換為l2/1范數[11].
2.2基于部件能量的目標提取
傳統的基于像素能量的CFAR目標提取算法需要先確定目標的大致能量支撐區,然后選擇遠離目標支撐區的單元作為噪聲樣本,估計噪聲方差設計CFAR檢測器[12]. CFAR檢測器的門限可表示為
α=emη.
(6)
式中:em表示噪聲樣本的能量均值;η為對應CFAR的固定常數,可直接調用軟件工具包進行計算.
不同于傳統的目標提取算法,基于部件的目標提取主要區別如下:
首先,噪聲樣本的估計不需要再確定目標的大致能量區. 這是因為通過對目標信號進行分解后,認為殘余的信號為噪聲樣本,因此,噪聲樣本的幅度均值只需對殘余信號的幅度求均值即可.
其次,對分解的部件的能量應用式(6)的CFAR門限進行提取. 由于雷達目標,尤其是人造目標,往往由一些典型的散射部件構成,傳統基于點散射模型的提取往往忽略了屬于同一部件像素之間的整體相關性,導致在低信噪比下目標部件與隨機分布的噪聲難以區分,使得部件的像素出現誤判,提取部件不連續的問題. 采用基于部件分解的目標提取算法將部件視為整體計算能量,有
Ep=|Sp(f,φ)|q,
(7)
對于單通道,q=1表示l1范數;對于多通道,q=1/2表示l2/1范數[14].
一般假定提取部件能量服從GΓ分布,即

x≥0,a,b,ν>0.
(8)
式中:a是尺寸參數;b是能量參數;ν是尺寸參數. GΓ分布是一個普適性的分布,不同的參數組合可以退化成指數分布(b=1,ν=1)、log分布(b→0,ν→∞)、瑞利分布(b=2,ν=1)和Weibull分布(ν=1)等.
利用最大似然均值(MaximumLikelihoodMean,MLE)估計參數. 最后,通過式(7)計算部件能量,利用式(6)的門限和式(8)部件能量的分布進行給定CFAR門限下的有效目標信號提取.
綜上,基于部件的目標提取算法具體流程圖如圖1所示.
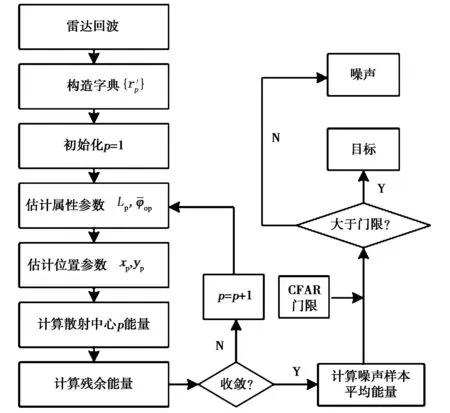
圖1 算法流程
3實測數據處理及結果分析
3.1數據說明
采用XPatch仿真的挖掘機數據進行實驗,該數據包含多個俯仰角度和全極化通道. 采用俯仰角度60°,方位觀測角度范圍為-10°~8.412 3°,頻率變化范圍為7.047 2~9.994 2GHz的一塊數據進行實驗. 該數據塊具有較明顯的分布式散射中心以及局部散射中心,能很好地說明算法的優越性. 為了方便,單通道統一采用HH極化通道數據. 而多通道的數據結果,可參考基于部件分解提取后的部件級Cameron分解[9].
對該數據采用距離多普勒(Range-Doppler,RD)成像,結果如圖2(a)所示,可以看出該姿態下目標信號包含許多分布式散射中心和局部式散射中心,因此可以較為全面地評價算法性能.
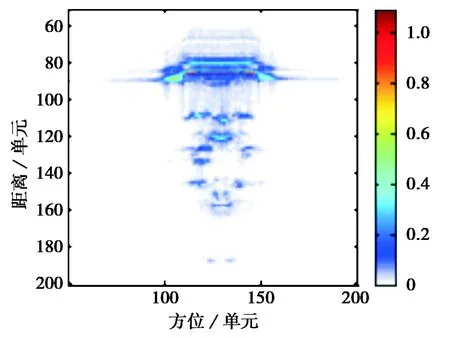
(a) 原始信號
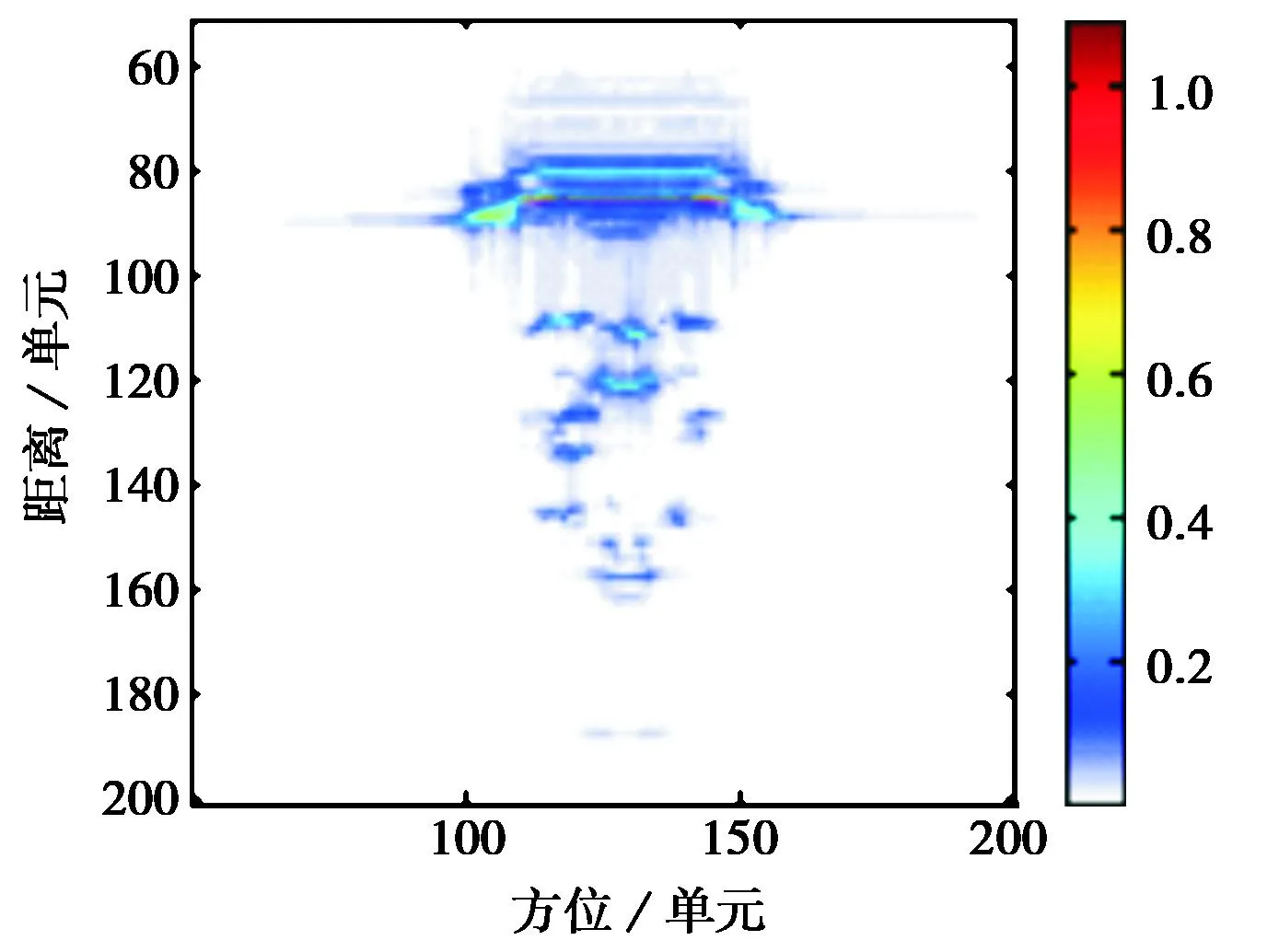
(b) 重構目標
(c) 殘余信號 圖2 無噪聲背景下基于部件的信號分解
利用屬性散射中心模型對目標信號進行分解,重構信號和殘差信號的RD成像,結果如圖2(b)和(c)所示. 可以看出重構信號與原始信號基本一致、殘差信號能量弱,因此可間接說明基于部件信號分解算法的有效性. 利用圖2作為參考信號,通過對如圖2(a)對應的原始信號添加服從高斯分布的隨機噪聲形成不同信噪比的數據. 利用傳統提取算法和基于部件的目標提取算法,在不同信噪比下進行目標提取. 通過實驗對比表明,所提方法在相同的虛警概率下能提取出更多的目標,且提取部件的完整性和連續性增強.
3.2實驗結果與分析
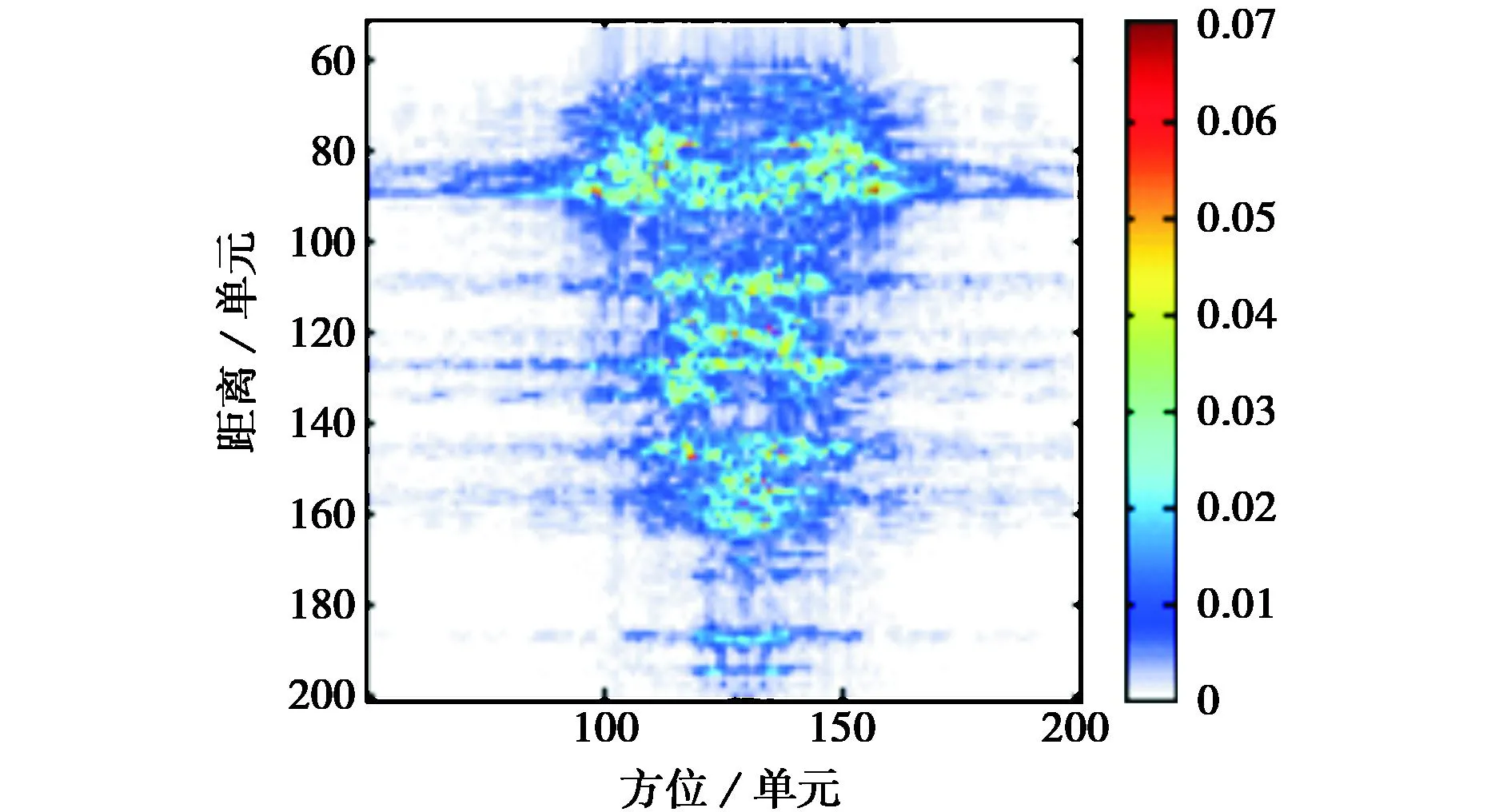
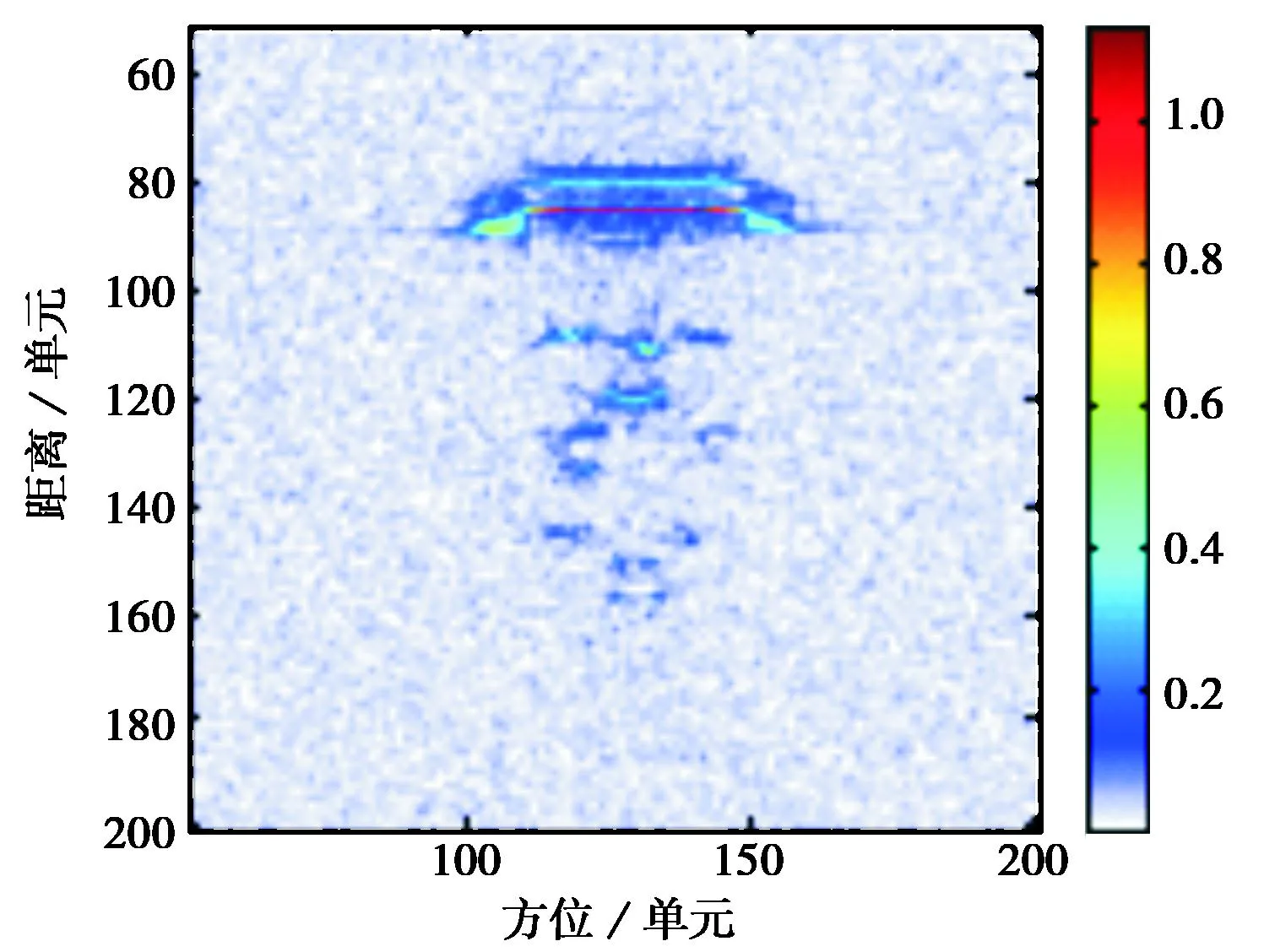
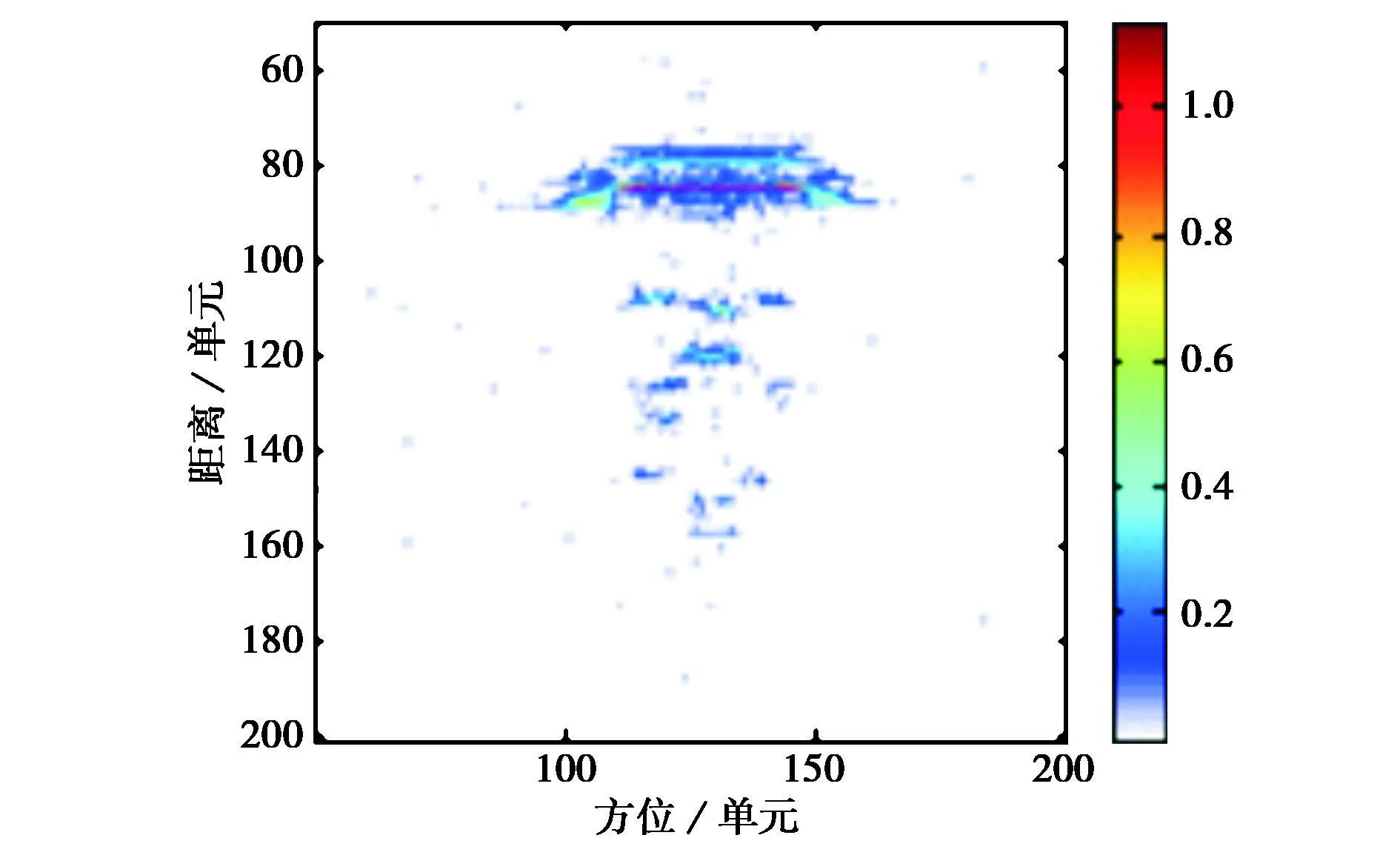
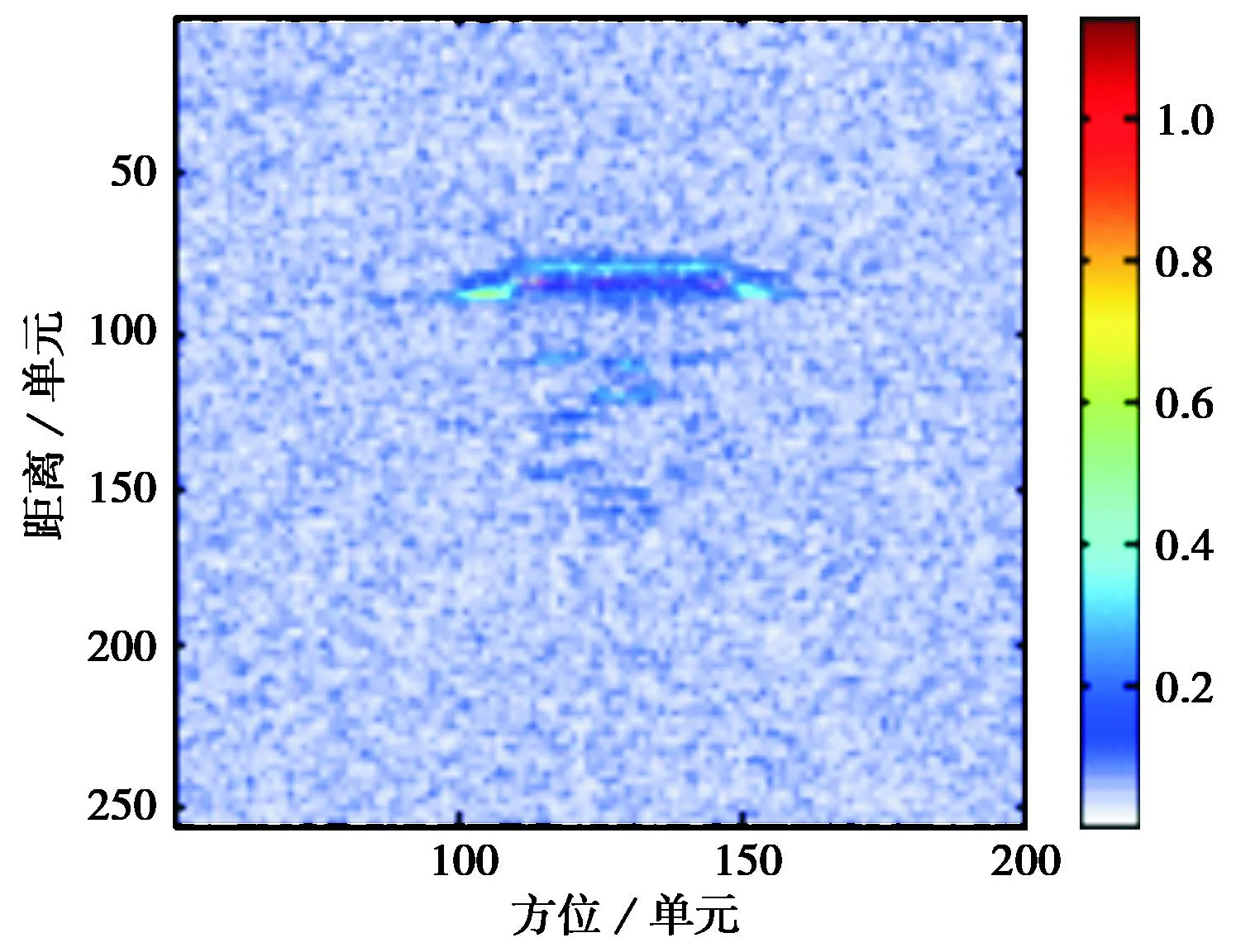
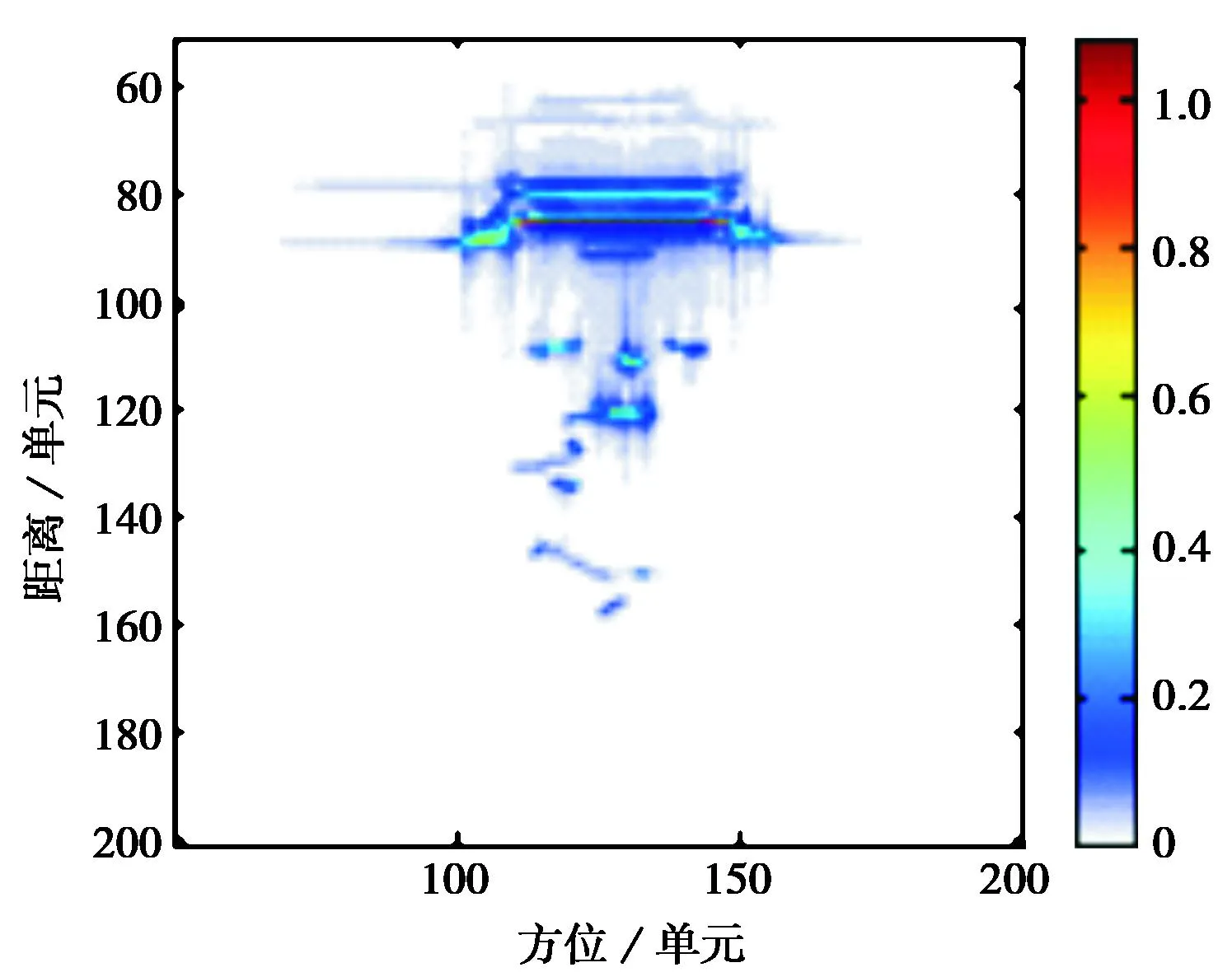
從理論分析部分可知,基于部件的目標提取算法在低信噪比下的優勢更為明顯.因此,在原始信號中添加隨機高斯噪聲使信噪比為0dB,RD成像結果如圖3(a)所示. 可以看出,在此信噪比下有部分弱散射部件已被噪聲淹沒. 采用傳統的基于像素能量的提取算法,取虛警概率為0.000 1,得到結果如圖3(b)所示. 可以看出,有部分弱散射部件被漏檢而部分噪聲卻被誤檢,另外,在挖掘機的頭部線狀結構已經出現不連續的情況. 這些問題與筆者討論的基于像素能量的提取方法在低信噪比下出現的問題吻合. 為了解決這些問題,筆者利用基于部件的整體能量提取提高提取性能,在相同的虛警概率下,利用基于部件分解的提取結果如圖3(c)所示. 對比圖2(a)和圖3(c),可以看出所提算法基本恢復了原始信號,并保證了部件的完整性,有效避免了部件間斷問題的出現.
(a) 原始信號
(b) 傳統CFAR提取
(c) 基于部件的CFAR提取 圖3 R SN=0 dB 目標檢測結果對比
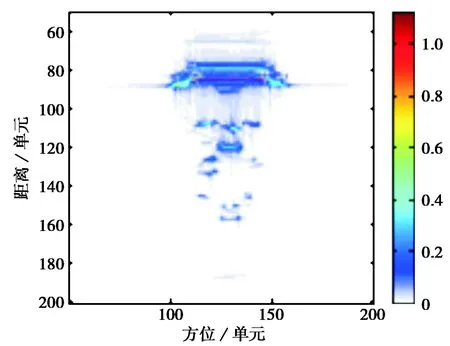
同樣,在信噪比為-5dB和虛警概率為0.002 8時,利用傳統基于像素的目標提取算法和基于部件能量的提取算法的對比結果如圖4所示. 可以看出,隨著信噪比的進一步降低,傳統檢測算法的性能下降明顯,而基于部件能量的提取算法能提取出部分被噪聲淹沒的弱分布式散射部件. 雖然不能全部恢復,但相比傳統算法,性能明顯改進.
值得指出,由于基于部件的能量提取需要對目標進行部件級分解,在算法復雜度上要高于傳統的基于像素能量的目標提取算法,但由于利用殘余誤差估計噪聲水平,省去了人為確定目標能量支撐區的誤差. 忽略傳統算法誤差估計的耗時,以信噪比為-5dB為例,在主頻3.2GHz和3.19GHz的i5
(a) 原始信號
(c) 基于部件的CFAR提取 圖4 R SN=-5 dB 目標檢測結果對比
雙核CPU,內存4GB下,兩算法耗時分別為18.4s和1 821.0s. 可以看出,基于部件能量的目標提取算法以犧牲時效為代價換取更精確和連續的目標提取,且耗時也在可接受范圍內.
為了進一步說明算法的優越性,定量比較傳統目標提取算法和基于部件的提取算法.實驗中,采用四個量化指標來評價算法的性能[12]:
首先,利用提取目標信號的RD成像結果與原始參考信號的RD成像的幅度相關系數作為量化指標,形如
(9)

第二個量化指標為目標背景比(Target-to-Background Ratio, TBR). 通過劃分目標支撐區和背景支撐區,將目標支撐區內的信號劃定為目標信號,其它為背景雜波.
(10)
T和B分別表示目標的支撐區和背景支撐區. 目標背景比用以評價目標提取的精度.
第三個量化指標為噪聲能量,表示為
(11)
噪聲能量用以評價目標提取算法的噪聲抑制能力.
第四個量化指標為圖像熵[13],用以表征提取目標圖像規律性,從而間接表征目標部件連續性.
在不同信噪比下分別進行20次蒙特卡洛實驗,取Coh,RTB,Enoise和圖像熵值的均值隨信噪比變化的曲線,如圖5所示. 可以看出:在低信噪比的條件下,基于部件能量的目標提取算法對傳統算法均有明顯的改善;且隨著信噪比的提高,算法性能提升,兩種算法性能越來越接近. 因此,在低信噪比下,建議采用基于部件能量的目標提取算法對人造目標進行部件級提取,而在高信噪比下,建議采用傳統算法進行目標提取.
4結論
針對傳統目標提取算法在低信噪比下存在提取部件不連續、提取效果不理想等問題,提出了一種基于屬性散射中心能量的目標提取方法. 通過對目標信號進行部件級分解,提取出目標的組成部件,并通過對提取部件的能量設置門限區分目標和背景噪聲,提高算法在低信噪比下的檢測效率和部件的連續性. 實驗結果證明了算法的優越性.
參考文獻
[1]楊建宇, 李俊生. 高分辨率雷達目標的隨機參量脈沖串檢測方法[J]. 電子學報, 2004, 32(6): 1045-1046.
YANGJianyu,LIJunsheng.Randomparameterpulsetraindetectorforhighresolutionradar[J].ActaElectronicSinca, 2004, 32(6): 1045-1046. (inChinese).
[2]萬朋, 王建國, 趙志欽, 等.SAR圖像點目標的檢測[J]. 電波科學學報,2000, 15(1): 55-59.
WANPeng,WANGJianguo,ZHAOZhiqin,etal.DetectionforSARimagepoint-target[J].ChineseJournalofRadioScience, 2000, 15(1): 55-59. (inChinese)
[3]保崢, 邢孟道, 王彤. 雷達成像技術[M]. 北京: 電子工業出版社, 2006.
[4]GERRYMJ,POTTERLC,GUPTAIJ.Aparametericmodelforsyntheticapertureradarmeasurements[J].IEEETransactionsonAntennasandPropagation, 1999, 47 (7): 1179-1188.
[5]XUShaokun,WEIXizhang,LIXiang,etal.Parameterestimationandperformanceanalysisofcoherentpolarizationattributedscatteringcentermodel[J].ChineseJournalofElectronics, 2013, 22(1): 195-201.
[6]馮訊, 王首勇, 萬洋, 等非高斯相關雜波背景下雷達目標統計檢測方法[J]. 電波科學學報, 2012,27(5): 1005-1011.
FENGXun,WANGShouyong,WANYang,etal.Radartargetstatisticaltestincorrelatednon-Gaussianclutterbackgrounds[J].ChineseJournalofRadioScience, 2012,27(5):1005-1011. (inChinese)
[7]STEEDLYWMMOSESRL.Highresolutionexponentialmodelingoffullypolarizedradarreturns[J].IEEETransactionsonAerospaceandElectronicSystems, 1991,27(3): 459-469.
[8]KELLERJB.Geometricaltheoryofdiffraction[J].JournalofOpticalSocietyofAmericaB, 1962, 52(2): 116-130.
[9]DUANJia,ZHANGLei,XINGMendao,etal.Polarimetrictargetdecompositionbasedonattributedscatteringcentermodelforsyntheticapertureradartargets[J].IEEEGeoscienceandRemoteSensingLetters, 2014, 11(12): 2095-2099.
[10]JIAOYun,YUJizhou,CHERenquan.ApplicationofRELAXalgorithmtoISARsuper-resolutionimaging[C]//ProceedingofInternationalConferenceonRadar.Piscataway:IEEE, 2006: 14.
[11]吳敏, 張磊, 邢孟道, 等. 基于分布式壓縮感知的全極化雷達超分辨成像[J]. 電波科學學報, 2015, 30(1):29-36.
WUMin,ZHANGLei,XINGMengdao,etal.Fullpolarizationsuper-resolutionSARalgorithmbasedondistributedcompressivesensing[J].ChineseJournalofRadioScience, 2015, 30(1):29-36. (inChinese)
[12]張磊. 高分辨SARJISAR成像及誤差補償技術研究[D]. 西安: 西安電子科技大學, 2013.
ZHANGLei.StudyonHighResolutionSAR/ISARImagingandErrorCorrelation[D].Xi’an:XidianUniversity, 2013. (inChinese)
[13]ZENGT,WANGR,LIF,etal.SARimageautofocusutilizingminimum-entropycriterion[J].IEEEGeoscienceandRemoteSensingLetters, 2013, 10(6): 1552-1556.

段佳(1989-),女,江西人,博士研究生,研究方向為基于電磁散射機理的雷達特征提取與應用.

吳億鋒(1987-),男,安徽人,博士研究生,研究方向為雷達雜波干擾抑制.

張磊(1984-),男,浙江人,講師,研究方向為ISAR與SAR信號處理.
杜曉林, 蘇濤. GS算法在多輸入多輸出雷達信號集設計中的應用[J]. 電波科學學報,2015,30(4):686-692. doi: 10.13443/j.cjors. 2014082301
DU Xiaolin, SU Tao. Signal sets design for MIMO radar via GS algorithm[J]. Chinese Journal of Radio Science,2015,30(4):686-692. (in Chinese).doi:10.13443/j.cjors. 2014082301
