基于改進PIDNN滑模控制的電壓型PWM整流器
2015-12-31 17:01:36彭一芯魏建勛黃輝先方鑫陸建龍
計算技術與自動化 2015年3期
彭一芯 魏建勛 黃輝先 方鑫 陸建龍


摘要:針對傳統滑模變結構控制在三相電壓型PWM整流器中應用時參數攝動所引起的抖動現象,提出一種改進PID神經網絡的滑模變結構在線控制方法,將PID三個參數作為神經網絡隱藏層的神經元,利用PID算法響應快、無靜差的特點以及神經網絡的在線自學習能力,實時對滑模趨近律參數進行修改,從而縮短系統狀態進入滑模面的時間并減小抖動。對選取的價值函數進行改進,使算法不會陷入局部最優而逼近全局最優解,并對系統的全局穩定性進行分析。通過仿真和實驗驗證,結果表明該方法能使系統全局穩定,抖動有明顯削弱且具有更好的動態響應。
關鍵詞:PWM整流器;滑模變結構;PID神經網絡;趨近律;全局最優解
中圖分類號:TM46 文獻標識碼:A
1引言
在電力電子技術應用領域中,PWM整流器具有實現能量雙向流動、直流側電壓恒定、電網諧波低、功率因素可調等特點,因而得到了廣泛使用。近幾年,針對PI控制器的缺點提出了一種滑模變結構控制(SMVSC)策略,其物理實現簡單,對參數變化和擾動不靈敏,響應速度快,適用面廣,能夠很好的應用于PWM整流器中,然而滑模變結構控制在本質上的不連續開關特性將會引起系統的抖振,使得穩定性降低的同時增加了控制器的運算量。
針對滑模變結構控制中的抖振現象,本文提出了一種改進PID神經網絡復合控制(PIDNN)與滑模變結構相結合的控制方案,相比于傳統滑模變結構控制,新的方案具有實時性好,無需精確的數學模型,魯棒性強,在數字信號處理器(digital signalprocessor,DSP)上易于實現,能夠很好的減小系統抖振等特點。
2三相電壓型PWM整流器數學模型
三相電壓型PWM整流器主電路如圖1。圖中ea、eb、ec為相位互差120°的三相交流電壓,ia、ib、ic為三相交流側電流,R為交流側等效電阻、L為濾波電感、Udc為直流側電壓,iL為負載電流,RL為負載電阻,C為負載電容,以及sa、sb、sc為整流器IGBT的開關函數。
由于三相靜止坐標系下的數學模型具有非線性時變特性,不利于控制系統的設計。根據功率不變原則,將三相靜止坐標系下的數學模型轉換到d-q同步旋轉坐標系,轉換后的數學模型如下:
式中:ed、eq為交流側電動勢的d、q分量;id、iq為交流側電流的d、q分量;sd、sq為整流橋d-q坐標系下的開關函數。
3雙閉環滑模變結構控制算法設計
3.1電壓外環滑模面的選取與計算單元的設計
滑模變結構控制器設計主要包括兩個環節,一是滑模面的選取,其次是趨近律的設計。
在三相VSR雙閉環控制系統中,內環有功電流id是電壓外環計算所得到的內部變量,則在系統滑模面的設計時需要控制的變量為外環電壓Udc和內環無功電流iq。為了使得輸出直流電壓穩定在給定值,需滿足等式Udc=Udcref。設計如下滑模面:
根據式(1)將電壓狀態變量表達式帶入式(2),得:
3.2電流內環無功電流iq滑模面選取
為了滿足系統在單位功率因素下運行,設計滑模面如下:
3.3趨近律的選擇
為了使系統狀態更快到達切換面且改善趨近運動的動態品質,本文采用了滿足存在性、可達性和穩定性要求的指數趨近律進行趨近,令:根據式(1)可得如下狀態方程:
根據式(1)、(6)、(7)、(8)、(9)可以得出滑模控制律為:
在指數趨近律公式中,kS可以保證系統狀態偏離切換面很遠時,以較快的速度到達滑模面。當S趨近于0時,kS趨近于0,但是由于Lεsgn(S)并不趨近于0,使得S也不趨近于0,而且系統參數和電力電子開關器件都具有一定的滯后性,造成系統狀態在滑模面上來回的運動,從而產生顫振的現象。所以對于Lεsgn(S)中系數e的選擇變得極其重要,若ε選擇太小,會使得系統達到滑模面的速度過慢,若ε選擇太大,則會使得系統出現超調甚至不穩定的現象。
為了解決上述問題,設計了一種改進PID神經網絡控制器,實時對趨近律參數進行調整,最大限度的減小抖動。
4改進PID神經網絡控制器設計
4.1PID神經網絡控制系統結構
PID神經網絡是一種多層前向神經網絡,與一般神經網絡的不同點在于隱藏層的選擇上。一般神經網絡中神經元的輸入一輸出特性都是靜態的相同的,而PID神經網絡的隱藏層由比例元、積分元、微分元組成,將PID控制規律融入到神經網絡中,它具有PID控制器響應快、超調小、無靜差的特點和神經網絡的在線自學習能力,同時也克服了一般神經網絡中的許多缺點。由于PIDNN結構簡單,實現較易,采用DSP等芯片進行實現,算法運算量不大,因此可以很好的使用在實際工程應用。PIDNN結構形式如圖2所示。
控制器采用2-3-1的3層BP神經網絡,輸入層輸入分別為給定值r(k)和實際測量值y(k)。
輸入層狀態函數為:
式中:l、p、q為輸入的最大限制值。
神經網絡中權值是由價值函數進行訓練更新的,若對初始權值選擇不當,很難保證系統的穩定性且容易陷入局部最優解。針對這個問題,本文選取的價值函數為李亞普諾夫穩定性判據所要求的S-ke+e=0條件,后面證明了其不存在局部最優解問題:
在三相PWM整流器系統的PIDNN控制器中,兩個輸入信號分別為給定信號和實際測量信號,輸出信號為滑模趨近律增益ε。通過不斷的運算,直到E為一個無限趨近于0的正數時學習訓練結束,此時已滿足系統穩定性要求。在算法中將輸入層到中間層的權值設定為定值:[w1i,w2i]=[1,-1],i=1,2,3,即給定信號與實際測量信號的誤差作為中間層神經元的輸入,不進行更新,從而減少了整個系統的計算量。中間層到輸出層的權值通過不斷的訓練得到,其訓練公式為:
4.2局部最優解問題
在BP神經網絡權值更新時,算法最大的問題就是停留在局部最優解上。根據系統不存在局部最優解的條件:當一個函數的二階導數不隨著變量改變其符號時,說明函數變量的曲率符號不變,該系統不存在局部最優解。根據所選取的價值函數(21),可證明其不存在局部最優解。
將所選價值函數對權值求二階偏導數:
由式(32)可以看出對所選價值函數求二階偏導數其符號始終為正,則該函數不存在局部最優解,但由于神經網絡是一種啟發式算法,不能夠得到精確的全局最優解值,但是可以逼近于全局最優解,則所得到的解為全局最優解或次優解。
4.3系統穩定性分析
使用李亞普諾夫函數來判斷系統的穩定性,這里選取與價值函數相同的式子來做判斷:
由此可以看出,當學習步長足夠大時,V為負定,此時的系統是穩定的。但在實際應用中,當把學習步長取的太大時,對系統的穩定性會產生一定的影響。根據上述分析,可得到三相PWM整流器PIDD-SMVSC控制原理圖如圖3。
5系統仿真結果及分析
利用Matlab/Simulink平臺搭建了三相電壓型PWM整流器的仿真模型,以本文所提出的方法與傳統滑模變結構控制算法進行仿真對比,驗證其算法的有效性和優越性。系統仿真主要參數為:380V/50HZ正弦交流電輸入,700V直流電壓輸出,交流側電感為4mH,等效阻抗為0.15 Q,直流側負載電阻為49Q,電容為235μF。為了使得仿真結果和實物實驗時的參數基本保持一致,選擇開關頻率為12kHz。
改進PID神經網絡滑模控制直流電壓輸出波形如圖4(a)所示,傳統滑模控制直流電壓輸出波形如圖5(a)所示。從兩幅圖的對比可以看出,輸出直流電壓波形都幾乎沒有超調,但傳統滑模變結構控制達到穩態的時間要長,當達到穩態后,傳統滑模控制的電壓值會在給定電壓±6V之間來回抖動,使得輸出直流電壓質量不高。由改進PID神經網絡滑模控制算法的仿真波形可以看出,在穩態時的抖動只有±0.05V左右,相比傳統滑模控制方法有明顯的削弱,控制效果更好。
為了進一步的驗證改進PID神經網絡滑模控制的動態性能,分別對負載突變和電壓給定值變化的情況進行了仿真實驗。圖6給出了負載突變時的波形,當系統直流電壓穩定后,在0.15S時將負載由50%額定值增至100%額定值。由圖可以看出直流輸出電壓經過0.003S恢復至穩定值且電流平穩的過渡到新的穩態值。
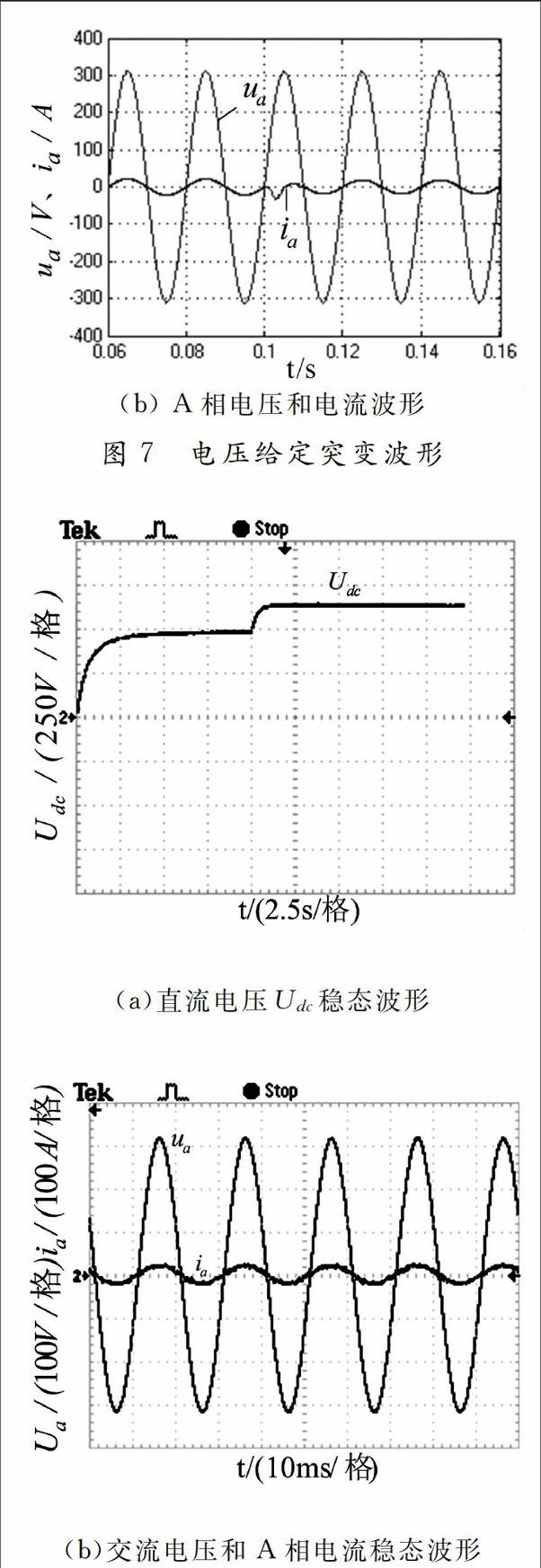
圖7給出了電壓給定突變時的仿真波形,當系統穩定后,0.1S時電壓的給定值由700V突變至650V,由圖7(a)仿真波形可以看出經過0.01S后到達新的穩定狀態,由圖7(b)可以看出交流電流也很好的過渡到新的穩態,使得電壓突變后同樣保持在單位功率條件下運行。
上述所做的仿真實驗驗證了本文所提出方法的正確性和優越性,相比傳統滑模變結構控制能夠更好的消除抖振且具有良好的魯棒性。
6實驗結果
為了驗證仿真結果的正確性,搭建了以TSM320F2818為主控芯片的實驗樣機,主要參數如下:直流輸出電壓為700V,額定功率為IOKW,IGBT采用三菱公司生產的CMIOODY-24H,交流側繞線電感為4mH,負載功率電阻為50Ω,負載電容由2個4700μF的電解電容串聯組成,采用五段式空問矢量技術,其開關頻率為12KHz。圖8(a)為輸出直流電壓波形,由于負載端電容的存在,通電瞬間電容側相當于短路,從而產生很大的沖擊電流,所以不能直接進行可控整流,而是首先進行帶有軟啟動的不控整流。不控整流10S后直流電壓穩定,再由DSP芯片控制進行可控整流。圖8(b)為帶載穩態時的A相電壓電流波形,由圖可以看出,功率因素接近1。圖8(c),(d)分別為帶載和空載時由不控整流到可控整流時直流電壓和交流A相電流波形。圖8(e)為在空載穩態運行后轉換為帶載情況下的直流電壓和交流A相電流波形。
7結論
本文在分析了三相電壓型PWM整流器數學模型的基礎上,針對傳統滑模變結構控制在整流器系統應用時所存在的不足,將改進PID神經網絡控制加入到了傳統滑模變結構控制中,使系統不會陷入局部最優從而逼近全局最優解,利用兩者的優點最大幅度的減小了系統的顫振且魯棒性好。由于控制算法簡單,易于在DSP上實現,在搭建的實驗樣機上進行了驗證,取得了很好的控制效果,具有一定的實用價值。