全回轉推進控制系統設計
2016-01-08 06:16:28桂棟,耿琪
上海船舶運輸科學研究所學報 2015年3期
關鍵詞:單片機
桂 棟, 耿 琪
(上海船舶運輸科學研究所 艦船自動化分所,上海 200135)
全回轉推進控制系統設計
桂棟,耿琪
(上海船舶運輸科學研究所 艦船自動化分所,上海 200135)
摘要:全回轉推進裝置可發出全方位的推力,使船舶具有靈敏的操縱性,現已廣泛應用于需要高靈敏度操作的特種作業船。對此,基于單片機技術和控制器局域網絡(Controller Area Network,CAN)現場總線技術,設計一種應用于內河LNG移動加液船的全回轉推進控制系統。從提高系統的控制精度和安全保護性能的角度介紹該系統的硬件、軟件設計,并進行試驗驗證。結果表明:該系統滿足設計要求,實現了對全回轉推進裝置的精確控制和安全保護。
關鍵詞:全回轉推進裝置;單片機;CAN總線
0引言
全回轉船舶的推進裝置有別于常規的推進裝置,其舵和槳是組合成一體的,且螺旋槳可在360°范圍內旋轉而發出全方位的推力,使船舶具有特別靈敏的操縱性。因此,這種全回轉推進裝置被廣泛應用于需要高靈敏度操作的特種作業船,如港作船、消防船、移動加液船等。
設計一種全回轉推進控制系統安裝在內河液化天燃氣(Liquefied Natural Gas,LNG)移動加液船上。該船長度為45.00 m,型寬為8.80 m,設計吃水為2.00 m;設計安裝2套L型電力推進全回轉舵槳裝置;在設計吃水狀態下,風力小于蒲氏風力三級的平靜深水區域,試航速度>8.3 kn。
1系統概述
為實現對全回轉推進裝置的遙控控制和自動安全保護,將全回轉推進控制系統設計為控制分系統和安保分系統兩大獨立分系統。左右舷推進裝置均配置一套遙控控制器和一套安全保護控制器,實現對推進裝置的遙控控制功能和自動安全保護功能。整個系統采用模塊化、數字化、網絡化設計,采用分散控制、集中管理原則;各控制器采用控制器局域網絡(Controller Area Network,CAN)現場總線聯網。兩大分系統獨立工作,互不干擾,這樣的設計不僅可以提高系統的生命力,而且具有良好的可維性和穩定性,全回轉推進控制系統的原理框圖見圖1。
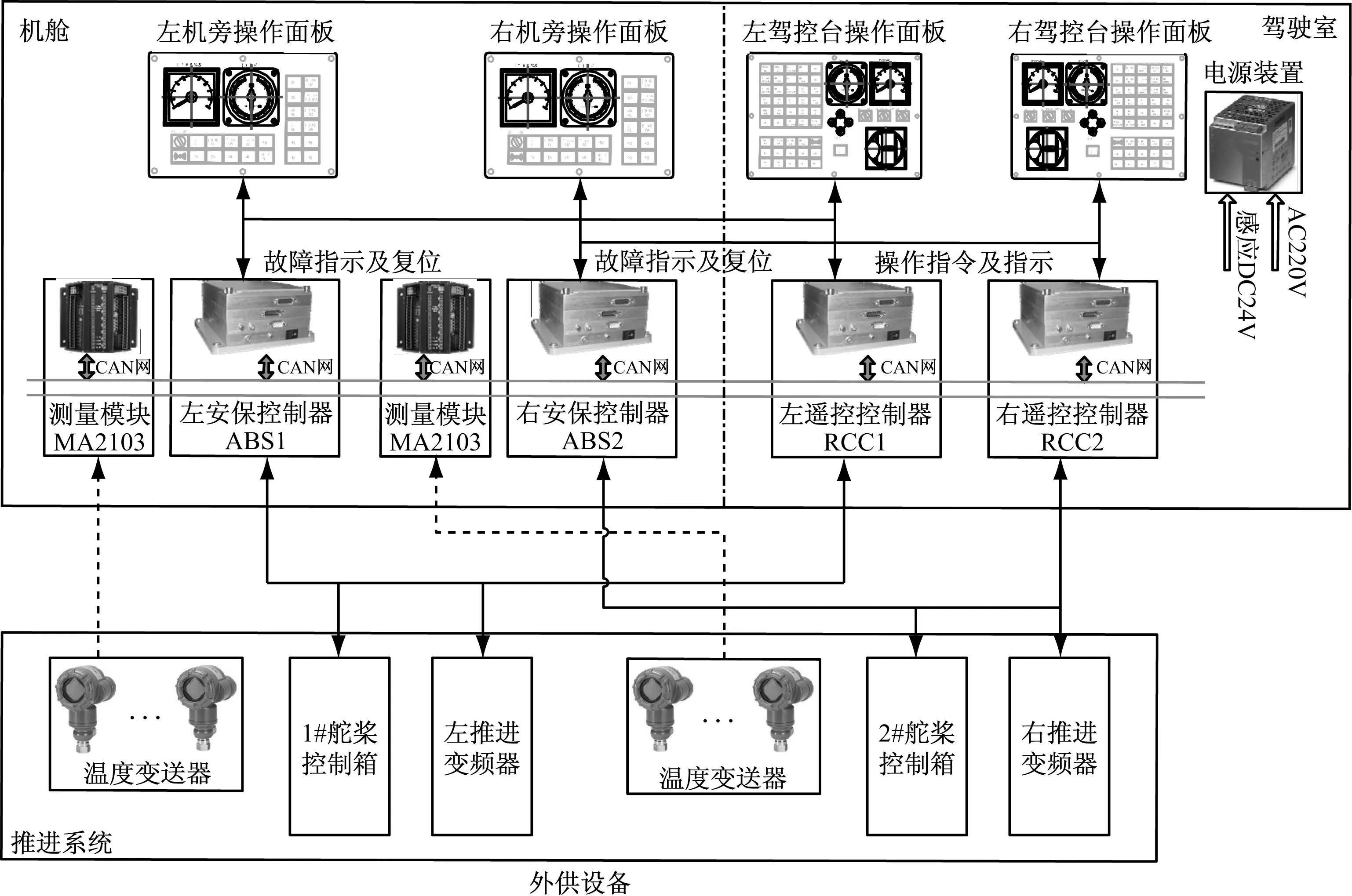
圖1 全回轉推進控制系統原理框圖
2硬件設計
全回轉推進控制系統的主要功能是采集各操作面板的命令信號以及全回轉推進系統運行狀態信號、船舶能量管理系統信號,經遙控控制器和安保控制器邏輯運算處理后,輸出控制信號到舵槳系統和變頻器,實現對全回轉舵槳液壓電機和推進電機的啟停、轉速和角度控制、故障報警和安全保護等。
為實現上述功能,選用上海船舶運輸科學研究所自主研發的STI-VC2100RC系列標準化模塊組成系統核心硬件;RCC遙控控制器的硬件與ABS安全保護控制器的硬件基本相同,都由標準的多功能CPU模塊、電源模塊及多功能輸入/輸出模塊構成。系統其他硬件包括全回轉操縱手柄、顯示儀表、按鈕和指示燈等,均采用中國船級社認證產品。系統主要硬件組成見表1。
3軟件設計
3.1軟件需求
系統的軟件需求主要從功能需求和性能需求兩方面分析。
3.1.1功能需求分析
全回轉推進控制系統既可在駕駛室進行遙控控制,又可在機旁進行手動控制。機旁控制優先于駕駛室控制,機旁與駕駛室之間的轉換只能在機旁進行,操作部位相互聯鎖,任何時刻都只能單個部位操縱。在駕駛室遙控操作時,不僅可以通過全回轉手柄遙控操縱舵槳裝置,而且可以設置單一手柄操作雙舵槳裝置,即控制系統根據選中的某一手柄發出的控制命令,同步控制左右兩套舵槳轉置運行。這種設計可提高船舶巡航時的操縱便利性。
全回轉推進控制系統可接收舵槳系統、變頻器、推進電機以及船舶能量管理系統發出的故障信號,進行故障降速和故障停車等安全保護處理。系統的主要功能如下:
(1) 變頻器啟動聯鎖功能:遙控控制器根據變頻器準備就緒信號、舵槳液壓電機運行信號和全回轉手柄在零位信號來判斷變頻器是否啟動聯鎖,并發出聲光報警信號;
(2) 啟停功能:遙控控制器根據變頻器啟停按鈕信號和啟動聯鎖的條件向變頻器輸出啟停開關量信號,根據舵槳液壓電機啟停按鈕信號向舵槳液壓電機輸出啟停開關量信號;
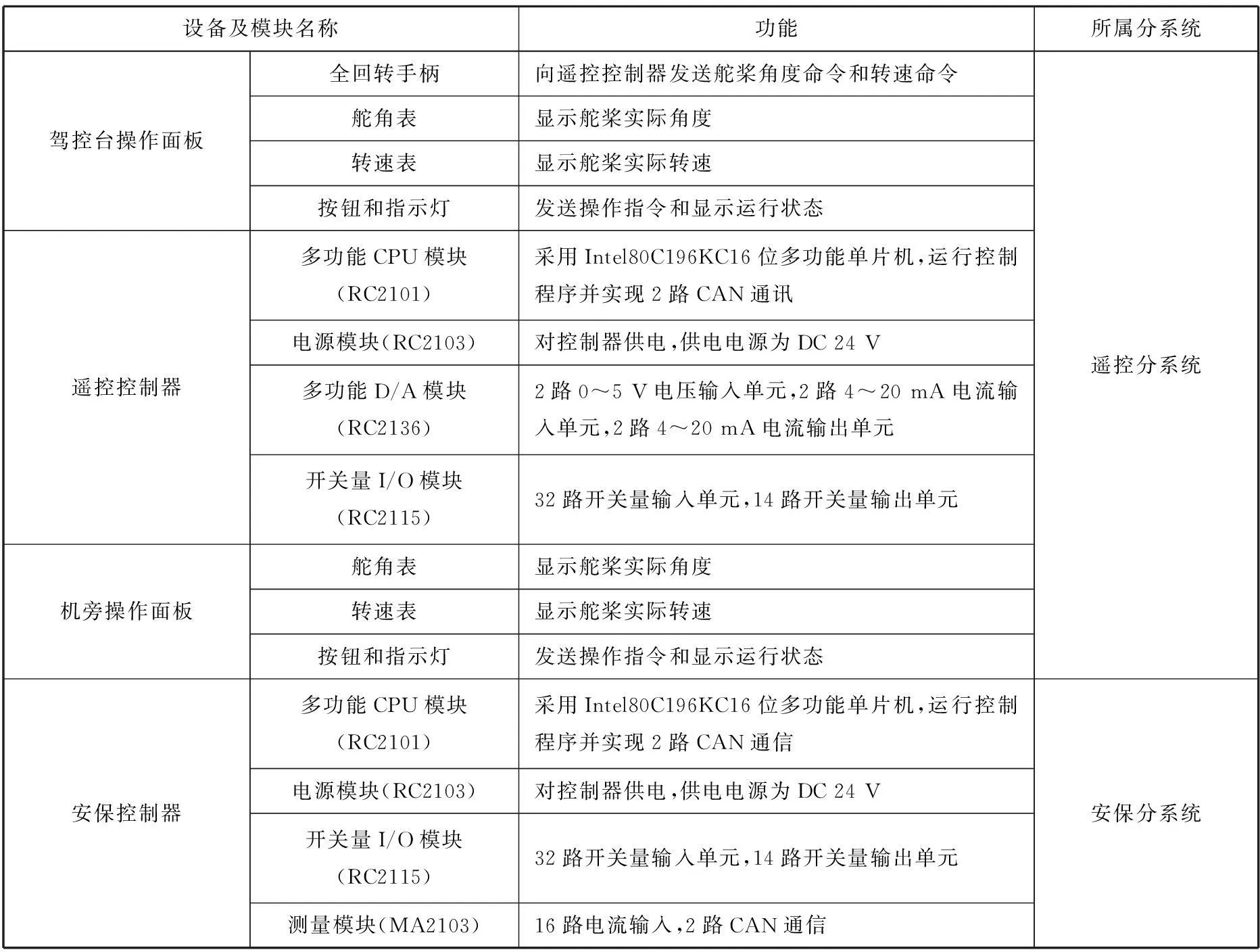
表1 系統主要硬件組成
(3) 角度和轉速控制功能:遙控控制器對全回轉手柄的角度位置信號和轉速位置信號進行邏輯運算處理后,向舵槳系統發出4~20 mA的標準電流信號實現對舵槳的0°~360°控制,向變頻器發出4~20 mA的標準電流信號實現對舵槳的0~1 500 r/min轉速控制,同時,為提高船舶高速航行時的安全性,當舵槳偏轉角度較大時,遙控控制器具有自動降速保護功能;
(4) 單手柄功能:利用單/雙手柄按鈕選擇單手柄模式后,遙控控制器根據選中的單一手柄發出的控制指令同步輸出4~20 mA的電流到左右兩舷舵槳系統和變頻器,同時控制兩舷全回轉舵槳運行。
(5) 功率限制功能:遙控控制器通過CAN網絡實時接收船舶能量管理系統發出的功率限制信號,根據報警信號自動降低舵槳運行工況,以保證全船用電安全。
(6) 安全保護功能:安保控制器接收舵槳液壓電機過載信號、舵槳液壓電機失電信號等嚴重故障信號,并向變頻器發送緊急停車命令;接收舵槳滑油溫度高信號、液壓油溫度高信號等故障信號,并向遙控控制器發出故障降速信號,可越控。
3.1.2性能需求分析
在處理硬線輸入輸出信號時,既要考慮提高系統的響應速度又要采取濾波處理防止輸入擾動;在處理CAN網絡信號時,應盡量滿足系統數據刷新時間,保證系統運行的實時性。具體需求見表2。

表2 系統性能需求表
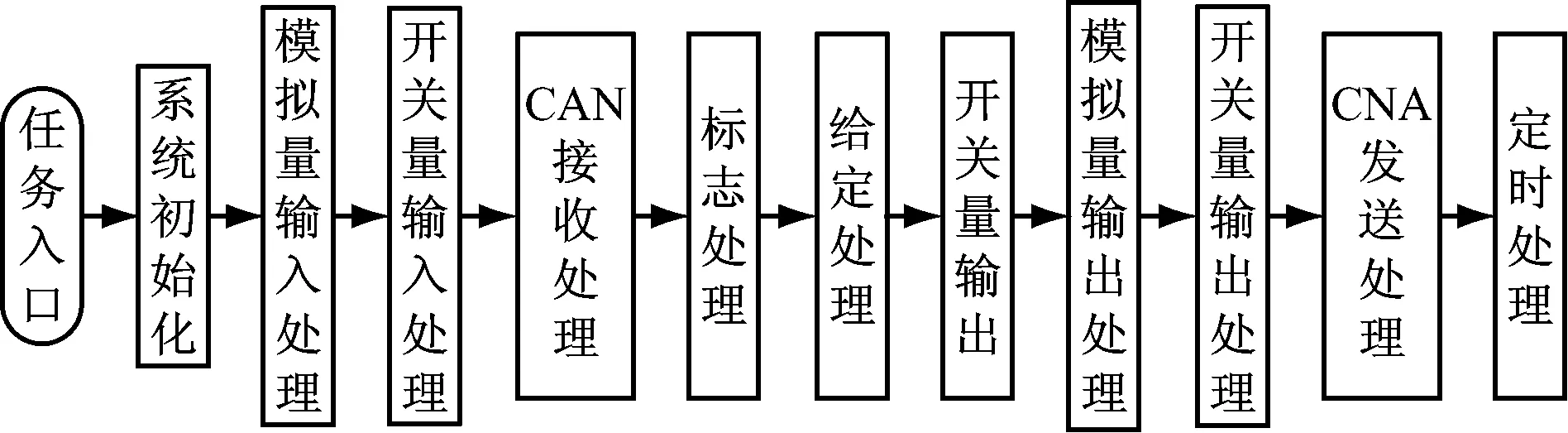
圖2 軟件流程圖
3.2軟件結構
為保證系統運行的可靠性和實時性,根據系統控制器的硬件環境,選用C語言作為程序開發語言。同時,為提高程序的可維性和可讀性,軟件盡量采用模塊化設計,將一些獨立、通用的函數功能封裝成模塊。系統通電后,先進行系統初始化和設備初始化,隨后開始主程序循環,對開關量和模擬量進行采樣并刷新數據;經標志處理和給定處理后,將啟停信號、故障報警信號、舵槳角度和轉速命令等信號經開關量或模擬量輸出到全回轉推進系統,并進行實時刷新。軟件流程見圖2。
3.3全回轉手柄位置算法設計
全回轉舵槳裝置可以360°旋轉,能為船舶提供全方位的推力,進而使船舶具有更好的操縱性。因此,對全回轉推進裝置最主要的控制就是對舵槳角度和轉速的控制。要提高全回轉舵槳的控制精度,最主要的就是精確計算全回轉手柄的位置,并將手柄位置信息精確轉換為4~20 mA的電流信號輸出到舵槳系統和變頻器。下面將對全回轉手柄的位置算法進行詳細論述。
3.3.1全回轉手柄輸出特性
系統選用的全回轉手柄共向遙控控制器輸出3路0~2.5 kΩ的電阻信號,其中:轉速位置信號為一路線性信號,角度位置信號為一路正弦信號和一路余弦信號。全回轉手柄的轉速位置有零位、半程和全速等3檔,角度位置有零位、90°、180°和270°等4檔,檔位之外為無級區。為實現檔位計算零誤差并提高手柄無級區位置的計算精度,將全回轉手柄位置各檔位算法設計為按標定參數計算,將手柄無級區位置算法設計為按檔位區間分段計算。
3.3.2全回轉手柄輸出信號標定
遙控控制器的多功能D/A模塊將采樣到的電阻信號經12位AD轉換變為0~4 096內的數值。系統調試時,先將全回轉手柄打到各檔位,通過CAN網讀取遙控控制器采樣到的全回轉手柄各檔位AD值,隨后將讀取到的各檔位AD值寫入到遙控控制器CPU模塊的可編程存儲器(EEPROM)中。系統運行時,遙控控制器程序將實時采樣到的AD值與可編程存儲器中的參數進行比對,以此確定全回轉手柄的檔位值。若采樣值不在任何檔位,則確定其檔位區間按相應曲線計算即可。可編程存儲器中標定參數定義及一組試驗數據見表3。

表3 可編程存儲器中標定參數定義及一組試驗數據表
經過上述軟件設計后,只要在設備調試時設定好參數,遙控控制器就可以對全回轉手柄檔位進行零誤差計算。由于轉速位置信號為線性信號,因此只需對手柄無級區的轉速位置信號進行簡單線性計算即可保證其計算精度;而手柄無級區的角度位置信號為兩路三角函數輸出,故需要運用相對復雜的反三角函數算法計算。
3.3.3信號處理及誤差修正
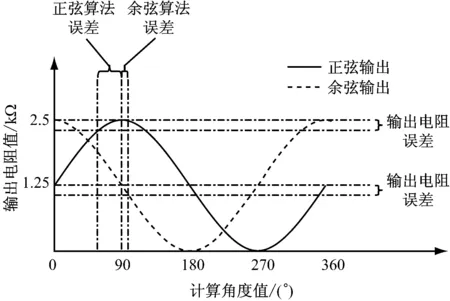
圖3 全回轉手柄輸出特性圖
數學意義上的角度正弦值和余弦值均只能在180°范圍內單調變化,故需要利用一路信號計算角度值,另一路信號確定角度象限,經修正計算后確定出0~360°位置。按照該設想,采用正弦信號計算角度值,余弦信號確定角度象限。但是在軟件測試過程中發現,運用該算法計算時,在90°和270°這些關鍵位置附近會產生較大誤差;換作余弦算法后又發現在0°和180°附近存在類似問題。分析后發現,這些誤差的產生是由手柄的正弦輸出和余弦輸出特性決定的(見圖3)。
由圖3可知,在90°和270°附近,正弦輸出斜率平緩,較小的輸出電阻波動即可引起計算角度產生較大波動,正弦算法誤差明顯比余弦算法誤差大,故采用余弦算法可明顯改善控制精度;同理,在0°和180°附近時,采用正弦算法可有效提高計算精度。綜上分析,遙控控制器軟件最終采用正弦余弦交叉算法確定全回轉角度位置,在45°~135°和225°~315°區間用余弦信號計算手柄角度,其他區間用正弦信號計算手柄角度。
通過以上軟件設計的遙控控制器不僅可以適應不同全回轉手柄的輸出特性,而且采用了兩路輸出信號的最優計算區間,大大提高了對全回轉手柄位置的計算精度,為整個系統實現對全回轉推進裝置的精確控制奠定了堅實的基礎。
4系統試驗驗證
全回轉推進控制系統試驗主要包括功能試驗和性能試驗。其中:功能試驗主要測試系統遙控控制功能和安全保護功能的完整性與正確性;系統性能試驗主要測試系統輸入/輸出信號處理精度和CAN網收發處理實時性。試驗時,利用實驗室主推進模擬裝置和全回轉推進控制系統搭建試驗平臺進行各項功能試驗,并通過CAN網接收數據測試系統的性能。經測試,系統的輸入/輸出信號及CAN網絡數據的刷新時間和計算精度均符合表2中的系統性能需求,遙控控制功能和安全保護功能均正確完整,整個系統性能滿足系統的設計需求,特別是全回轉角控制精度得到了較大提高。部分測試結果見表4。
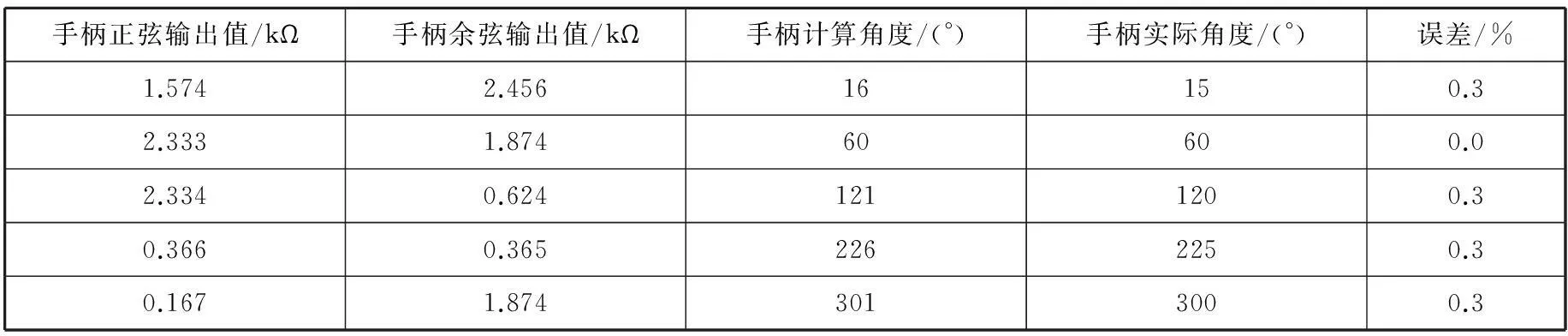
表4 全回轉角控制試驗表
5結語
全回轉推進裝置在為船舶提供360°全方位動力的同時也對船舶操縱精度和航行安全提出了更高的要求。將成熟的單片機和can現場總線技術作為硬件技術基礎,并在軟件設計中注重提高系統的控制精度和安全保護性能,實現了一種實時性強、可靠性高、控制性能優良的全回轉推進控制系統的設計。該系統目前已投入生產并通過了中國船級社的檢驗和用戶的驗收,在技術上實現了對全回轉推進裝置的精確控制和安全保護。
參考文獻:
[1]中國船級社.鋼質內河船舶建造規范[Z].北京:人民交通出版社,2014.
[2]劉丹丹,沈愛弟.全回轉舵槳電力推進系統的設計[J]中國水運,2013,13(3):122-127.
[3]羅曉園,李新,鄭銳聰,等.基于內河運輸船的新型全回轉舵槳設計研究[J].船舶,2013,24(4):39-43.
中圖分類號:U664.3;U664.82
文獻標志碼:A
收稿日期:2015-06-12
作者簡介:傅明初(1960—),男,浙江鎮海人,輪機長,主要從事機務管理工作。
文章編號:1674-5949(2015)03-034-06
Design of Rotary Propulsion Control System on Mobile LNG Refueling Ship
GuiDong,GengQi
(Ship Automation Branch, Shanghai Ship &Shipping Research Institute, Shanghai 200135, China)
Abstract:The mobile LNG refueling ship is equipped with the rotary propulsion device, which is widely used on special workboats which need high manoeuverability. The rotary propulsion control system for the mobile LNG refueling ship is designed with SCM technology and CAN field bus technology. The hardware and software design of this system are described from the angle of improving system control accuracy and safe protection performance.
Key words:rotary propulsion device; single chip microcomputer; controller area network
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
