大型雷達天線的精度補償研究
2016-01-08 07:55:07劉喆,湯輝,倪仁品
機械與電子 2015年4期
大型雷達天線的精度補償研究
劉喆,湯輝,倪仁品
(中國電子科技集團公司第三十八研究所,安徽 合肥 230088)
Research on Compensating Precision in the Large-scale Radar
LIU Zhe,TANG Hui,NI Renpin
(NO.38 Research Institute of CETC,Hefei 230088,China)
摘要:闡述了某大型雷達天線的結構特點,分析了軸系誤差測量和精度補償的原理。介紹了PCC(programmable computer controller)控制系統的特點,設計使用PCC控制系統實現某大型雷達天線的俯仰運動,詳細描述了控制系統軟件程序的設計。最后,通過實驗測量獲得雷達天線的誤差補償模型,實現了該雷達天線的高精度運動控制。
關鍵詞:雷達天線;精度補償;PCC控制系統
中圖分類號:TP23
文獻標識碼:A
文章編號:1001-2257(2015)04-0023-03
收稿日期:2014-10-29
作者簡介:劉喆(1985-),男,河南鄭州人,工程師,研究方向為伺服控制;湯輝(1980-),男,安徽淮南人,高級工程師,研究方向為伺服控制;倪仁品(1966-),男,安徽合肥人,工程師,研究方向為伺服控制。
Abstract:The structural characteristic of the large-scale radar antenna was introduced. The principle of measuring error and compensating precision were analyzed. The feature of PCC was stated. The PCC is used in a large-scale radar system. The design of PCC program was concerned. The model of compensating precision was carried out experimentally. The high-precision motion control of the radar antenna was achieved.
Key words:radar antenna;compensating precision; PCC control system
0引言
大型化天線是未來雷達的一個重要發展方向。對于運動控制系統來說,使用傳統的閉環控制方法很難實現大型雷達天線的平穩運動和精準定位。因此,軸系誤差測量和精度補償技術成為實現大承載高精度傳動與控制的必然手段。高性能的角度檢測裝置和控制系統,是實現高精度運動控制的必要手段。在此,使用鋼柵尺作為角度傳感器,使用PCC作為運動控制器,實現了某大型雷達天線的俯仰運動控制。利用誤差檢測和精度補償的相關方法,實現了大型雷達天線的高精度運動控制。
1雷達總體結構
研究的對象是某大型雷達,天線的長寬尺寸超過10 m,重量接近100 t。雷達的結構如圖1所示。為了保證該大型天線的平穩運動,系統采用雙端驅動形式,即左右各1套傳動和位置檢測裝置。雷達天線安裝在2個支撐座之間,通過齒輪傳動的形式,依靠伺服電機的旋轉實現該天線的俯仰運動。鋼柵尺是角度測量傳感器。PCC控制器是雷達天線運動的控制核心,它與各個部件相連,接收各傳感器的反饋信息和角度參數,輸出運動指令控制電機轉動,進而通過傳動機構實現天線的俯仰運動。
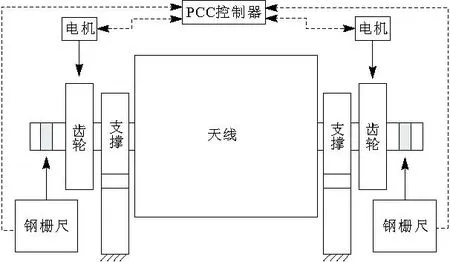
圖1 雷達總體結構
系統使用的鋼柵尺是AMO公司設計的一種直線/角度測量傳感器,具有精度高、抗干擾等特點。鋼柵尺的系統組成如圖2所示。鋼帶尺上分布著腐蝕刻制的高精度柵格,使用過盈配合套裝在旋轉軸上;讀數頭固定在軸承支座上,當被測軸旋轉時,讀數頭與鋼帶尺相對運動,從而實現參數測量;細分盒的功能是數據處理。系統使用一款增量式鋼柵尺,采用雙讀數頭形式,旋轉1周輸出1 039 360個脈沖,每個脈沖對應約1.25″。

圖2 鋼柵尺測量系統
2誤差測量和精度補償原理
大型雷達天線軸系誤差測量和精度補償的原理如圖3所示。使用高精度的角度測量裝置可以獲得天線陣面的真實俯仰角度,這個值與鋼柵尺傳感器示數之間的偏差就是運動控制誤差。在天線運動行程上選取若干特定點進行誤差測量,再經過諧波分析或曲線擬合即可得到誤差補償模型。將誤差補償模型代入控制器的程序算法中,進而驅動伺服電機讓天線運轉,通過軟件的方式實現了軸系精度的實時補償。

圖3 軸系精度補償原理
針對大型雷達的特點,選用激光跟蹤儀作為角度測量手段。雷達天線角度測量原理如圖4所示。激光跟蹤儀測量天線陣面上4個基準點的空間坐標,通過坐標運算可以獲得陣面的傾角和兩端扭動程度。采用算法消除天線兩端的扭動后,由激光跟蹤儀測算出的陣面傾角可以作為天線的真實俯仰角代入誤差分析。

圖4 雷達天線角度測量原理
誤差補償模型可以分為公式模型和查表模型。公式模型的含義是推導出補償曲線的數學公式后直接代入控制器中,這種誤差補償方法精準度高,但是計算復雜,適用于高性能控制器。查表模型是將擬合出的補償曲線離散成補償表,該表保存在控制器內部以備查詢。查表法不需要復雜運算,不影響控制器的實時動作。在此,使用三次曲線插值擬合補償曲線,并利用查表法構建運動誤差補償模型。
3控制系統的設計
3.1PCC控制器
PCC是貝加萊公司提出的自動控制系統。PCC控制系統融合了PLC和工業PC的技術優勢,采用Runtime定性分時多任務的操作系統,具備可靠性高、多任務運行、運算速度高、內存和存儲單元容量大、擴展性和開放性好、通信組網能力強等特點,在工業控制領域中得到廣泛應用。本設計使用貝加萊2003系列PCC模塊搭建運動控制系統,2003系列PCC采用模塊化結構,支持熱插拔,屬于高性價比的緊湊型可編程控制器。
PCC控制系統的最大特點是分時多任務操作系統,全部任務程序按照優先級分層,優先級高的任務具有較短的循環周期。在PCC軟件系統中,關鍵任務及時間要求高的任務一般放在優先級高的任務層中,普通任務可以放在優先級較低的任務層中。如圖5所示,Cyclic #1是優先級最高的任務層,它的循環周期最短,而Cyclic #2、Cyclic #3隨著優先級依次遞減,循環周期依次遞增。優先級高的任務可以中斷優先級低的任務,因此,系統可以保證高優先級任務的實時執行。PCC的分時多任務操作系統使得循環周期處理更加靈活,優化了控制系統資源,提高控制系統的實時性。

圖5 PCC分時多任務的執行示意
3.2軟件程序設計
PCC控制系統的軟件任務層如表1所示,所有的程序被分為3層。Cyclic #1層放入強實時任務,包括指令解析、參數計算、動作執行以及狀態機跳轉。Cyclic #2層放入的是弱實時任務,包括PCC系統與監控主站、角度傳感器的通信。Cyclic #3層的任務優先級和實時性要求最低,它實現的動作包括故障處理、IO映射和按鍵掃描等。

表1 PCC軟件任務層
PCC控制器的軟件流程如圖6所示。指令解析、計算運動參數、誤差補償、狀態機跳轉和元器件動作這5個任務屬于Cyclic #1強實時任務層,其他的程序都是以這個任務循環作為主體。首先,鋼柵尺的角度信息被傳遞到參數計算程序塊,經過解碼運算后進入誤差補償任務。接著,PCC控制器查詢誤差補償表,修正運動參數。隨后,軟件程序依據補償后的參數控制狀態機的跳轉,并執行實時動作。這時,Cyclic #1強實時任務循環結束,PCC控制器準備下一次任務循環。

圖6 軟件控制流程
4實驗
利用圖4所示原理標定某大型雷達天線的6個俯仰運動角度,同時根據鋼柵尺的反饋示數計算對應的角度。2個角度值及測角誤差如表2所示。
在圖7中,橫軸是鋼柵尺角度,縱軸是測角誤差,6個標記點對應每次誤差標定。使用三次曲線擬合法擬合1條曲線,該曲線就是雷達天線的誤差補償曲線。為了減少PCC控制系統的CPU計算壓力,采用查表法保存精度補償模型。以0.1°為間隔在橫坐標進行離散化處理,再將對應的數值導入PCC控制器中,保存成數組表格的形式以備查詢。

表2 天線誤差測量

圖7精度補償擬合曲線
5結束語
研究了大型雷達天線誤差測量和精度補償的原理,使用鋼柵尺作為角度反饋裝置,PCC系統作為運動控制器,詳細介紹了主要功能部件的工作原理。通過實驗驗證了提出的精度補償方法,實現了大型雷達天線的高精度運動控制。
該技術能夠在精度較低的結構硬件條件下,僅通過軟件算法補償實現控制精度的提升,大幅度節約成本,降低開發風險。提出的設計思路也可以在大型雷達的控制系統中作為參考范例。
參考文獻:
[1]張力.天線座結構設計與軸系精度分析.西安:西安電子科技大學,2012.
[2]鮑茂然.感應同步器精密測角技術研究.哈爾濱:哈爾濱工業大學,2013.
[3]齊蓉,肖維榮.可編程控制器技術.北京:電子工業出版社,2011.
[4]貝加萊工業自動化公司.自動化運行(Runtime)系統 TM213.2007:29.
