狀態(tài)反饋PID控制方法在300 MW機(jī)組的應(yīng)用
2016-01-14 06:12:59高會忠,要亞坤
河北電力技術(shù) 2015年1期
狀態(tài)反饋PID控制方法在300 MW機(jī)組的應(yīng)用
高會忠,要亞坤
(大唐清苑熱電有限公司,河北保定071000)
摘要:針對300 MW機(jī)組過熱蒸汽溫度自動調(diào)節(jié)穩(wěn)定性難以控制的問題,提出采用帶狀態(tài)觀測器的狀態(tài)反饋PID控制和常規(guī)串級PID控制理論相結(jié)合的控制方法,分析狀態(tài)反饋期望極點(diǎn)的配置過程、仿真試驗(yàn)及現(xiàn)場試驗(yàn),結(jié)果表明帶有狀態(tài)觀測器的狀態(tài)反饋PID控制使得系統(tǒng)的調(diào)節(jié)速度變快、超調(diào)量減小、穩(wěn)定性強(qiáng),優(yōu)于常規(guī)串級PID控制。
關(guān)鍵詞:狀態(tài)反饋PID;串級PID;過熱汽溫控制;狀態(tài)觀測器
收稿日期:2014-07-08
作者簡介:高會忠(1982-),男,工程師,主要從事清苑熱電熱控專業(yè)工作。
中圖分類號:TM714.3
文獻(xiàn)標(biāo)志碼:B
文章編號:1001-9898(2015)01-0055-03
Abstract:Aiming at the automatic adjustment of super-heated steam temperature of 300 MW unit which exists stability control problem, a method combined with state feedback PID control with state observer and conventional cascade PID control theory is proposed. The configuration process of state feedback controllers for expected pole is analyzed, and the simulation tests and field tests are proceeded respectively.The results show that the PID feedback control with state observer makes the system adjustment faster, and with smaller overshoot and better stability, so it has better performance than the conventional cascade PID control.
Application of State Feedback PID Control Method in 300 MW Unit
Gao Huizhong,Yao Yakun
(Datang Qingyuan Co-generation Power Co.,Ltd, Baoding 071000,China)
Key words:state feedback PID;cascade PID;superheated steam temperature control;state observer
在火電廠自動控制系統(tǒng)中,過熱汽溫是機(jī)組正常運(yùn)行必須保持在一定范圍的重要參數(shù)[1],300 MW機(jī)組過熱器管道較長,與噴水降溫系統(tǒng)距離相對較遠(yuǎn),被控對象的延遲和慣性也大大增加,過熱蒸汽溫度自動調(diào)節(jié)的穩(wěn)定性一直是鍋爐側(cè)自動控制系統(tǒng)的一大難題[2]。目前,大多數(shù)火力發(fā)電廠機(jī)組的過熱汽溫控制系統(tǒng)大都采用常規(guī)PID串級控制方案或帶導(dǎo)前汽溫微分信號補(bǔ)償?shù)碾p回路控制方案,其PID參數(shù)是根據(jù)被控對象的數(shù)學(xué)模型來進(jìn)行整定的,而過熱汽溫系統(tǒng)具有時(shí)變性、大時(shí)滯、大慣性和非線性的特點(diǎn),因此難以建立精確的數(shù)學(xué)模型,其控制效果都不是特別理想,難以將溫度控制在理想范圍之內(nèi)。
1狀態(tài)反饋PID控制方法介紹
狀態(tài)反饋PID控制方法是指將現(xiàn)代控制理論[3]中狀態(tài)反饋和狀態(tài)觀測器理論與常規(guī)PID控制理論相結(jié)合的控制方法,既克服了PID對大延遲系統(tǒng)控制不穩(wěn)定的缺點(diǎn),又兼具在現(xiàn)代DCS中易于實(shí)現(xiàn)的優(yōu)點(diǎn)。對于完全能控的線性系統(tǒng),可以通過狀態(tài)反饋實(shí)現(xiàn)極點(diǎn)的任意配置。但是,不是所有系統(tǒng)的狀態(tài)都能完全測量的,過熱汽溫系統(tǒng)的大慣性和非線性特性給狀態(tài)反饋的物理實(shí)現(xiàn)造成了困難。因此,為了實(shí)現(xiàn)系統(tǒng)極點(diǎn)的任意配置,狀態(tài)觀測器理論的引進(jìn)在很大程度上解決了這一問題,能夠改善系統(tǒng)的控制效果。以下嘗試將帶有狀態(tài)觀測器的PID控制引入到過熱汽溫控制系統(tǒng)中。
2狀態(tài)反饋期望極點(diǎn)選擇
選取清苑電廠300 MW機(jī)組的過熱汽溫控制系統(tǒng)為研究對象[4]。
由上述對象的傳遞函數(shù)可知,此對象有1個(gè)極點(diǎn)在-0.05處,4個(gè)極點(diǎn)在-0.04處,均在s平面的左半平面,符合極點(diǎn)配置及存在觀測器的充要條件[5]。串級系統(tǒng)與狀態(tài)反饋系統(tǒng)輸出比較見圖1,加入非線性環(huán)節(jié)系統(tǒng)輸出比較見圖2,極點(diǎn)配置在-0.2和-0.5處系統(tǒng)輸出見圖3。
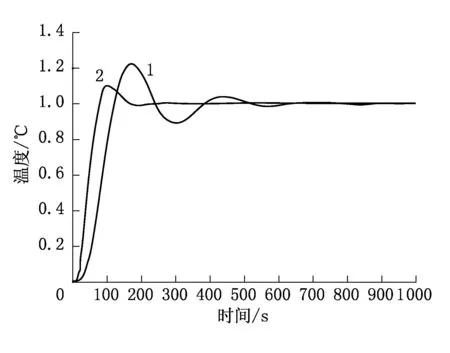
圖1 串級系統(tǒng)與狀態(tài)反饋系統(tǒng)輸出比較
由圖1可知,將狀態(tài)反饋的極點(diǎn)配置在-0.2處。其中,曲線1為串級系統(tǒng)輸出,曲線2為加入狀態(tài)反饋后的系統(tǒng)輸出。
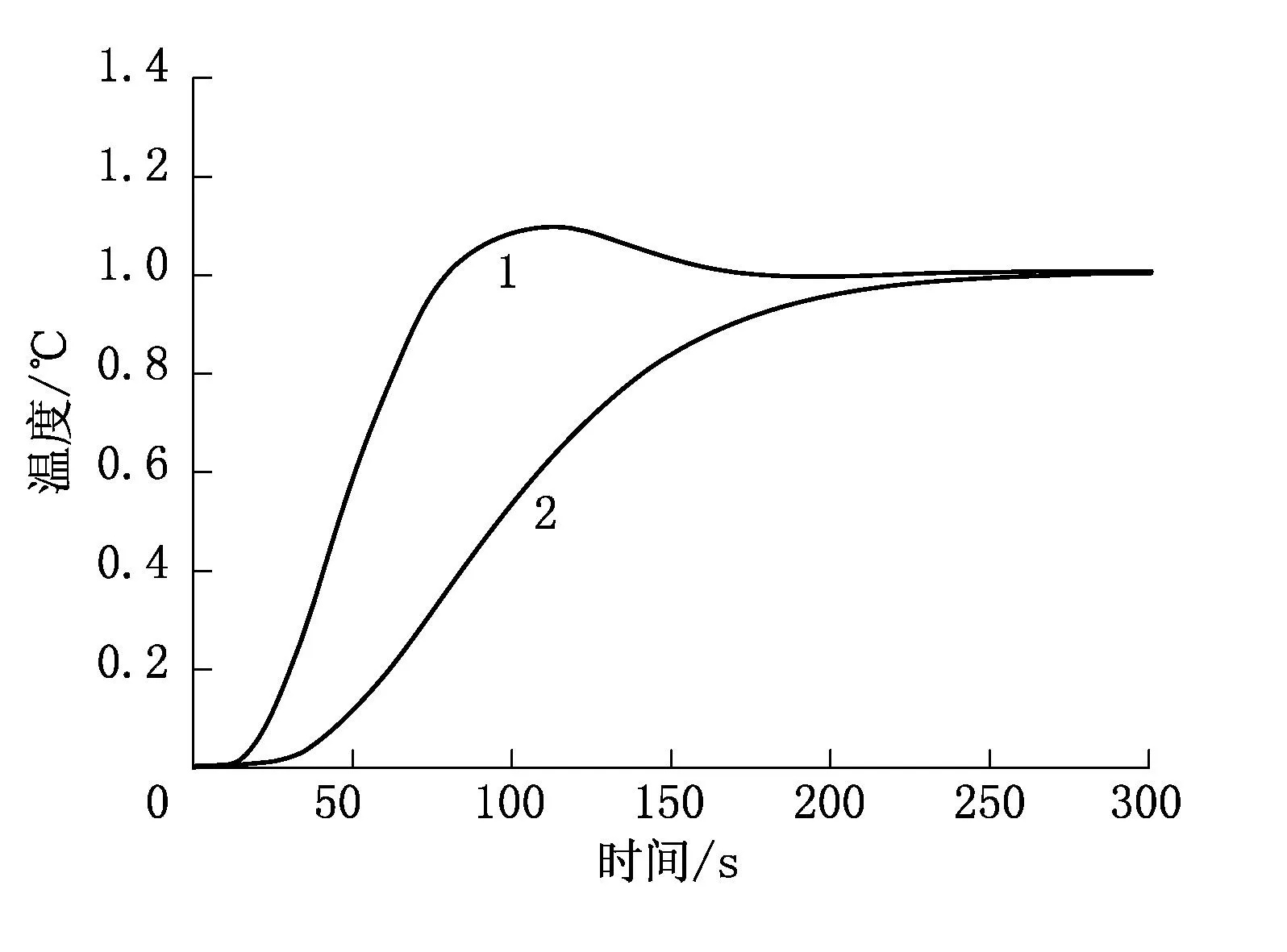
圖2 加入非線性環(huán)節(jié)系統(tǒng)輸出比較
由圖2可知,將狀態(tài)反饋極點(diǎn)配置仍在-0.2處。曲線1為未加非線性環(huán)節(jié)的系統(tǒng)輸出,曲線2為加入非線性環(huán)節(jié)的系統(tǒng)輸出。
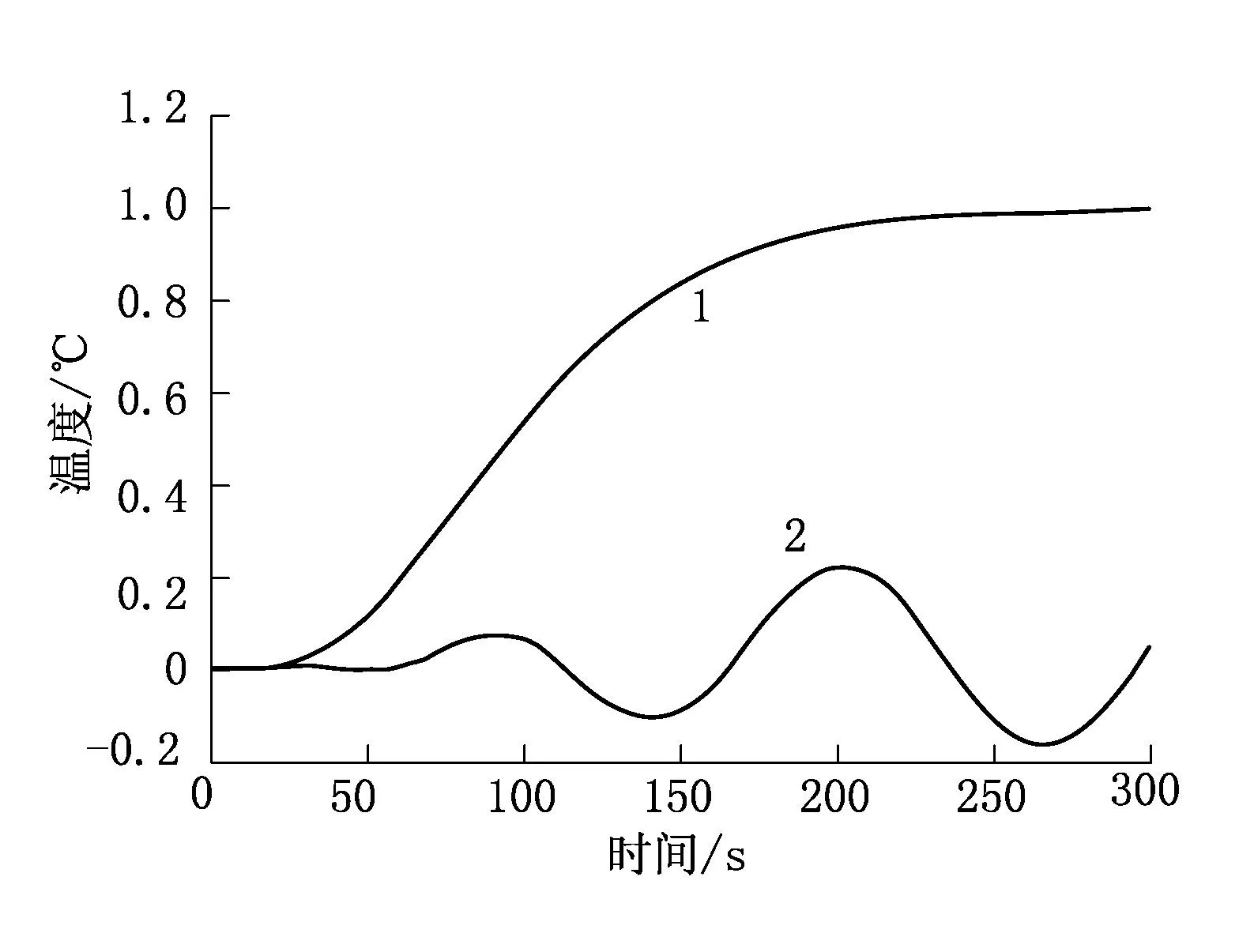
圖3 極點(diǎn)配置在-0.2和-0.5處系統(tǒng)輸出
由圖3可知,曲線1為極點(diǎn)配置在-0.2處時(shí)系統(tǒng)輸出,曲線2為極點(diǎn)配置在-0.5處時(shí)系統(tǒng)輸出。
由圖1的仿真曲線結(jié)果可以看出,進(jìn)行極點(diǎn)配置后的系統(tǒng)控制效果優(yōu)于常規(guī)串級控制效果。但是,當(dāng)極點(diǎn)配置于-0.2處時(shí),狀態(tài)反饋矩陣為:
K=[5.4613,6.8267,3.4133,0.8533,0.54]
當(dāng)極點(diǎn)配置于-0.5時(shí),狀態(tài)反饋矩陣為:
K=[1072.7,466.4,81.1,7.1,2]
參考圖3,可知隨著極點(diǎn)左移,狀態(tài)反饋參數(shù)也隨之增大,使得控制器輸出振幅波動變大。參考圖2,加入非線性環(huán)節(jié),系統(tǒng)調(diào)節(jié)時(shí)間變大。因而,受到現(xiàn)場執(zhí)行機(jī)構(gòu)行程的限制,實(shí)際很難達(dá)到圖1的理想控制效果。
結(jié)合清苑電廠300 MW機(jī)組的過熱汽溫控制系統(tǒng),將對象極點(diǎn)配置到[-0.2,-0.2, -0.2, -0.2, -0.2],狀態(tài)觀測器的極點(diǎn)配置到[-0.4,-0.4,-0.4,-0.4,-0.4]。極點(diǎn)配置前后對象的階躍響應(yīng)見圖4。
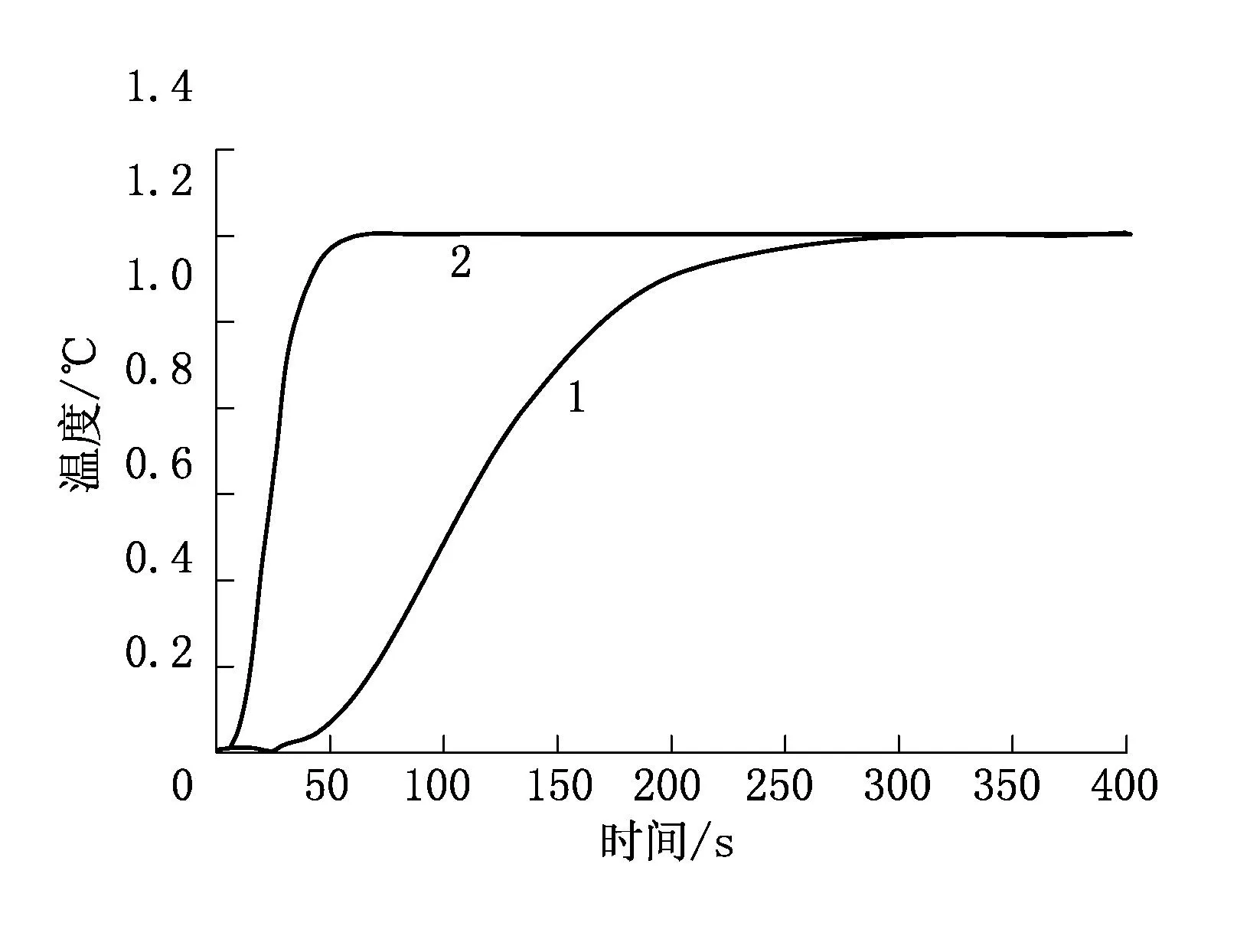
圖4 極點(diǎn)配置前后對象的階躍響應(yīng)
由圖4可知,曲線1為極點(diǎn)配置前被控對象的階躍響應(yīng),曲線2為極點(diǎn)配置后被控對象的階躍響應(yīng)。由于狀態(tài)反饋控制會對系統(tǒng)的穩(wěn)態(tài)增益,即系統(tǒng)的穩(wěn)態(tài)放大系數(shù)有影響,圖中為了便于比較,采用狀態(tài)反饋后的對象輸出放大了500倍。比較圖中曲線1和曲線2可以看出,被控對象的調(diào)節(jié)時(shí)間明顯變短。
3狀態(tài)反饋PID控制方法仿真研究[6-7]
基于帶觀測器的狀態(tài)反饋PID的過熱汽溫控制系統(tǒng)框圖見圖5。
圖中G1(S)是用于狀態(tài)反饋控制的被控對象的傳遞函數(shù),即把串級控制系統(tǒng)中的內(nèi)回路和汽溫過程一起當(dāng)作受控對象。
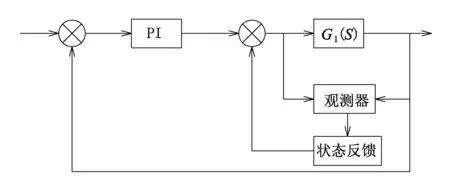
圖5 基于帶觀測器的狀態(tài)反饋 PID的過熱汽溫控制

3.1 控制方案
常規(guī)串級PID控制系統(tǒng)中主調(diào)節(jié)器為PI調(diào)節(jié)。其比例系數(shù)為1,積分時(shí)間常數(shù)為0.014;副調(diào)節(jié)器為P調(diào)節(jié),其比例系數(shù)為-5。
基于帶觀測器的狀態(tài)反饋PID的過熱汽溫控制系統(tǒng)中調(diào)節(jié)器為PI調(diào)節(jié)。其比例系數(shù)為10,積分時(shí)間常數(shù)為10,將被控對象的極點(diǎn)配置到[-0.2, -0.2,-0.2,-0.2,-0.2],狀態(tài)反饋參數(shù)為K=[5.4613,6.8267,3.4133,0.8533,0.54],狀態(tài)觀測器的極點(diǎn)配置到[-0.4,-0.4,-0.4,-0.4,-0.4],并且加了限幅。
3.2 控制效果比較
不同的擾動下,按照上述參數(shù),在串級PID控制系統(tǒng)與帶觀測器的狀態(tài)反饋PID控制系統(tǒng)2種方案下,過熱汽溫控制系統(tǒng)調(diào)節(jié)效果進(jìn)行比較見圖6、圖7。
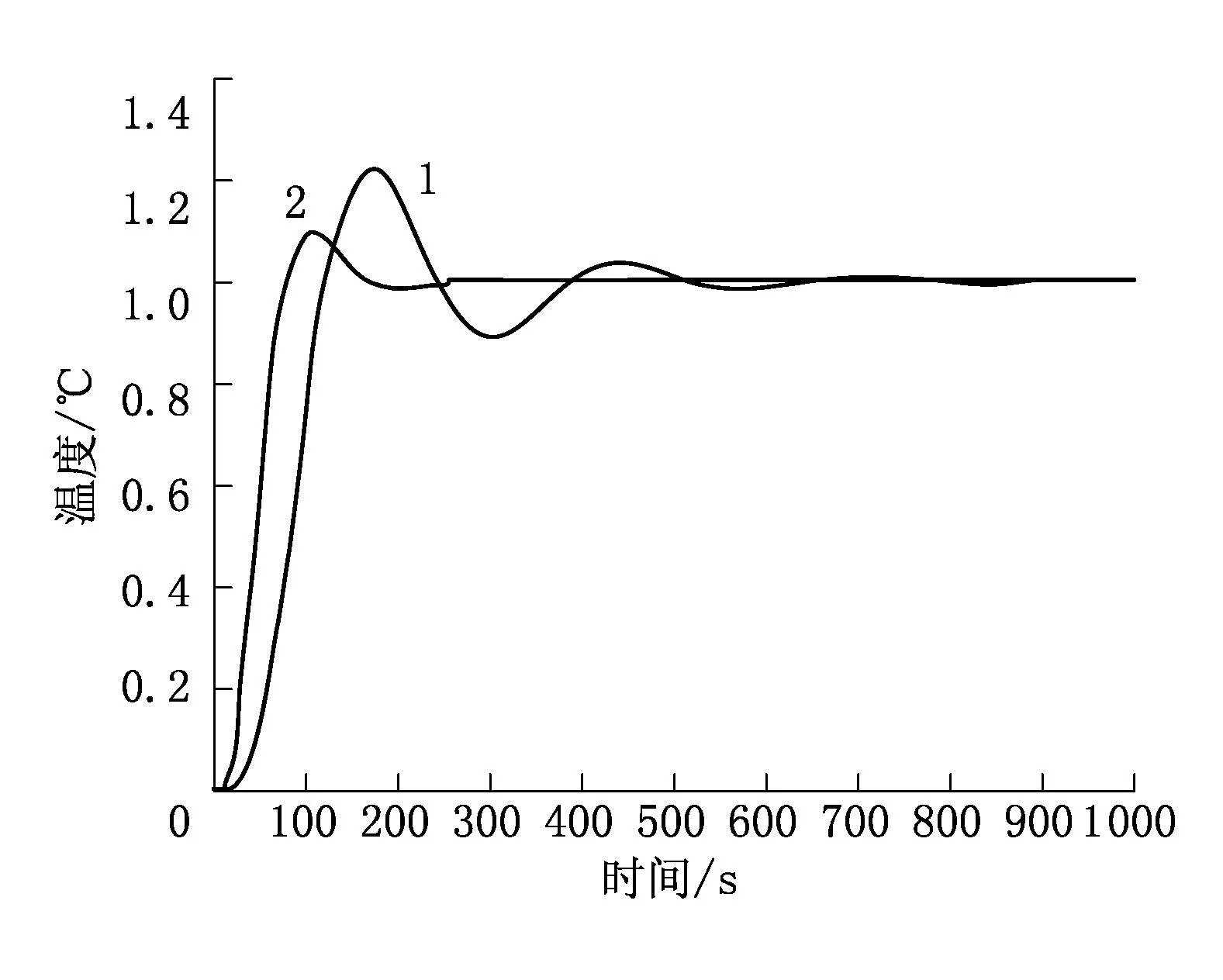
圖6 1 ℃定值擾動下的輸出比較
由圖6可知,曲線1為在1 ℃給定值擾動下串級PID控制的過熱汽溫控制系統(tǒng)的輸出,曲線2為在1 ℃給定值擾動下基于帶觀測器的狀態(tài)反饋PID控制的過熱汽溫控制系統(tǒng)輸出。
由圖7可知,曲線1為在5 t噴水量擾動下串
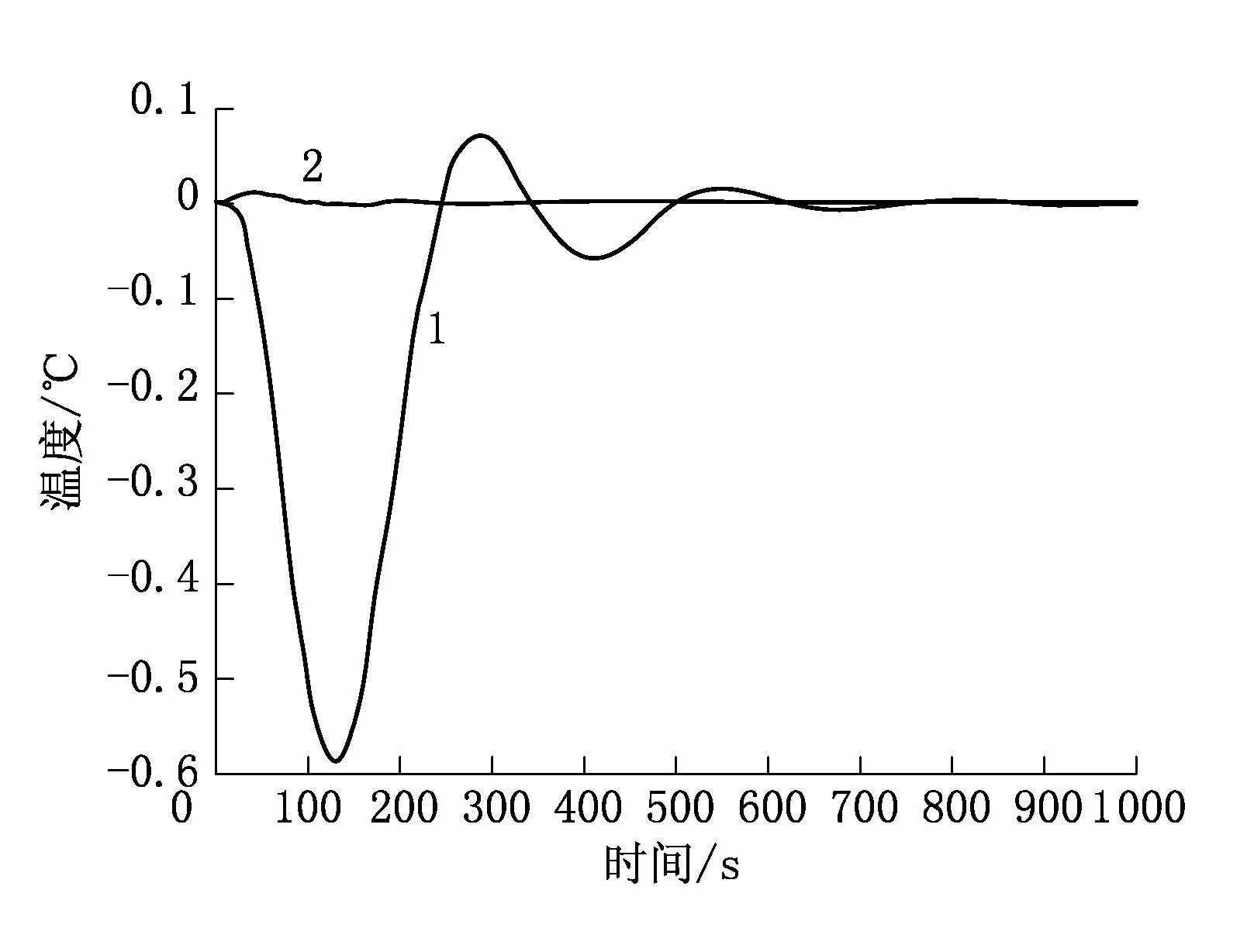
圖7 5 t噴水量擾動下的輸出比較
級PID控制的過熱汽溫控制系統(tǒng)的輸出,曲線2為在5 t噴水量擾動下基于帶觀測器的狀態(tài)反饋PID控制的過熱汽溫控制系統(tǒng)的輸出。1 ℃給定值擾動下狀態(tài)反饋PID控制的過熱汽溫比串級PID控制的過熱汽溫調(diào)節(jié)速度更快,調(diào)節(jié)時(shí)間縮短了300 s左右;而在5 t噴水量擾動下狀態(tài)反饋PID控制的過熱汽溫抗干擾能力更強(qiáng),串級PID控制的過熱汽溫在經(jīng)歷600 s左右的調(diào)節(jié)后趨于穩(wěn)定。由此可知帶觀測器的狀態(tài)反饋PID控制系統(tǒng)比常規(guī)串級PID控制系統(tǒng)調(diào)節(jié)速度快且有更強(qiáng)的抗干擾能力,也說明了該方法的有效性和實(shí)用性。
4狀態(tài)反饋PID控制方法的應(yīng)用
將狀態(tài)反饋PID控制方法在清苑電廠300 MW機(jī)組的過熱汽溫控制系統(tǒng)試用,該電廠主蒸汽溫度為二級噴水減溫,其中二級過熱器分A、B兩側(cè),熱工控制系統(tǒng)硬件為和利時(shí)MACSV5分散控制系統(tǒng)。狀態(tài)反饋PID 控制方法在該電廠的試驗(yàn)應(yīng)用效果較好,使自動投入問題得到了簡化,主蒸汽溫度控制在穩(wěn)定范圍內(nèi),主蒸汽溫度的偏差不超過±2 ℃。
5結(jié)束語
通過以上仿真研究和現(xiàn)場試驗(yàn)得出:與常規(guī)串級PID控制系統(tǒng)相比,狀態(tài)反饋PID控制方法改變了系統(tǒng)的性能,使過熱汽溫對象的響應(yīng)速度變快,時(shí)間常數(shù)變小,穩(wěn)定性提高。另外, 現(xiàn)代控制理論中帶狀態(tài)觀測器的狀態(tài)反饋PID控制算法簡單,可直接用于DCS算法實(shí)現(xiàn),具有很好的應(yīng)用價(jià)值。
參考文獻(xiàn):
[1]金以慧.過程控制[M].北京:清華大學(xué)出版社,2007.
[2]牛培峰,郭興華,王磊,等.火電廠汽包
鍋爐汽溫控制的研究進(jìn)展與發(fā)展趨勢[J].燕山大學(xué)學(xué)報(bào),2008
(4):367-368.
[3]謝克明.現(xiàn)代控制理論基礎(chǔ)[M].北京:北京工業(yè)大學(xué)出版社,2010.
[4]張靜.MATLAB在控制系統(tǒng)中的應(yīng)用[M].北京:電子工業(yè)出版社,2007.
[5]胡曉倩,張蓮,楊菁.過熱汽溫自動控制系統(tǒng)的狀態(tài)觀測器設(shè)計(jì)與反饋極點(diǎn)配置[J].重慶工學(xué)院學(xué)報(bào),2003(1): 41-44.
[6]李學(xué)明,李志軍,林四成.電廠過熱汽溫系統(tǒng)DMC-PID控制仿真研究[J].華北電力大學(xué)學(xué)報(bào),2005,20(8):58-62.
[7]韓璞,董澤.控制系統(tǒng)數(shù)字仿真[M] .北京:中國電力出版社,2007.
本文責(zé)任編輯:楊秀敏
電能計(jì)量技術(shù)之三——