磁懸浮隔振系統(tǒng)非線(xiàn)性動(dòng)力學(xué)建模與仿真
2016-01-15 05:46:20武倩倩,陳尚,陳永強(qiáng)等
振動(dòng)與沖擊 2015年20期
第一作者武倩倩女,博士生,1988年12月生
通信作者劉榮強(qiáng)男,教授,博士生導(dǎo)師,1965年7月生
磁懸浮隔振系統(tǒng)非線(xiàn)性動(dòng)力學(xué)建模與仿真
武倩倩1,陳尚2,陳永強(qiáng)2,岳洪浩1,劉榮強(qiáng)1
(1.哈爾濱工業(yè)大學(xué)機(jī)電工程學(xué)院,哈爾濱150001; 2.中國(guó)運(yùn)載火箭技術(shù)研究院研究發(fā)展中心,北京100076)
摘要:進(jìn)行適用于空間微環(huán)境的磁懸浮六自由度隔振系統(tǒng)動(dòng)力學(xué)研究,設(shè)計(jì)磁懸浮隔振平臺(tái)結(jié)構(gòu),借助有限元軟件分析振源中隔振平臺(tái)定子模態(tài);分析磁懸浮隔振平臺(tái)不同擾動(dòng)力作用下系統(tǒng)耦合非線(xiàn)性特性,建立面向控制的非線(xiàn)性動(dòng)力學(xué)模型;通過(guò)仿真研究系統(tǒng)對(duì)不同激勵(lì)擾動(dòng)下的動(dòng)力學(xué)響應(yīng)。該研究為控制算法設(shè)計(jì)提供理論基礎(chǔ)及依據(jù)。
關(guān)鍵詞:磁懸浮;微振動(dòng);模態(tài)分析;動(dòng)力學(xué)建模
基金項(xiàng)目:國(guó)家自然科學(xué)基金(51475117);高等學(xué)校學(xué)科創(chuàng)新引智計(jì)劃(B07018);機(jī)器人技術(shù)與系統(tǒng)國(guó)家重點(diǎn)實(shí)驗(yàn)室(哈爾濱工業(yè)大學(xué))自主研究課題(SKLRS201301B)
收稿日期:2014-12-11修改稿收到日期:2015-03-11
中圖分類(lèi)號(hào):TB535;TP273
文獻(xiàn)標(biāo)志碼:A
DOI:10.13465/j.cnki.jvs.2015.20.027
Abstract:A six degrees of freedom maglev vibration isolation system was designed and analysed. The structure of the maglev vibration isolation platform was designed, and the stator of the vibration isolation platform, locating at the vibration source, was analyzed by using finite element software. By analyzing the coupling characteristics of the system under the influences of different disturbing forces, a nonlinear dynamic model for control was established and nonlinear dynamics behaviors of the system were simulated. The results provide a basis for the design of control algorithms.
Nonlinear dynamics modeling and simulation of maglev vibration isolation system
WUQian-qian1,CHENShang2,CHENYong-qiang2,YUEHong-hao1,LIURong-qiang1(1. School of Mechatronics Engineering Harbin Institute of Technology, Harbin 150001, China;2. China Academy of Launch Vehicle Technology Research and Development Center, Beijing 100076, China)
Key words:magnetic levitation; micro vibration; modal analysis; dynamics modeling
空間低頻微振動(dòng)對(duì)高分辨率指向精度、精密有效載荷使用及空間站科學(xué)實(shí)驗(yàn)結(jié)果的準(zhǔn)確性影響較大[1-3]。傳統(tǒng)被動(dòng)隔振方法不能隔離低頻范圍內(nèi)的振動(dòng),需采取主動(dòng)隔振技術(shù)實(shí)現(xiàn)低頻微振動(dòng)有效隔離[4]。磁懸浮隔振技術(shù)用于低頻微振動(dòng)隔離,為材料、流體、燃燒等基礎(chǔ)學(xué)科實(shí)驗(yàn)提供理想的微重力環(huán)境[5-7]。磁懸浮隔振平臺(tái)在超靜平臺(tái)、精密制造、精密定位等領(lǐng)域應(yīng)用廣泛[8-11]。磁懸浮主動(dòng)隔振原理即利用電、磁產(chǎn)生的懸浮力抵消擾動(dòng)力達(dá)到隔振目的。該原理主要為洛倫茲力原理及電磁力原理。基于洛倫茲力原理,驅(qū)動(dòng)力與電流的關(guān)系可近似為線(xiàn)性,大大簡(jiǎn)化控制方法;而電磁力原理具有明顯的非線(xiàn)性,影響平臺(tái)的穩(wěn)定性能。因此,本文以空間有效載荷在軌低頻微振動(dòng)為對(duì)象,用洛倫茲力原理實(shí)現(xiàn)振動(dòng)隔離與抑制。
Muller等[12]建立的三自由度主動(dòng)隔振系統(tǒng)動(dòng)力學(xué)模型,僅描述豎直方向運(yùn)動(dòng);Beadle等[13-14]利用線(xiàn)動(dòng)量、角動(dòng)量守恒建立六自由度運(yùn)動(dòng)微分方程,用局部剛度及阻尼表示浮子、定子關(guān)系Zenga[15]研究主動(dòng)隔振平臺(tái)的動(dòng)力學(xué)模型,卻未考慮線(xiàn)纜影響;Hampton等[16]利用牛頓-歐拉方程建立磁懸浮隔振平臺(tái)的六自由度運(yùn)動(dòng)微分方程,但動(dòng)力學(xué)模型較復(fù)雜,并無(wú)針對(duì)隔振平臺(tái)非線(xiàn)性動(dòng)力學(xué)行為的仿真驗(yàn)證。任維佳等[17]用相同方法建立定子坐標(biāo)系下六自由度運(yùn)動(dòng)微分方程,但在設(shè)計(jì)控制算法時(shí)需進(jìn)一步轉(zhuǎn)化。本文建立慣性坐標(biāo)系下的六自由度非線(xiàn)性運(yùn)動(dòng)微分方程,為平臺(tái)非線(xiàn)性特性控制器設(shè)計(jì)提供理論基礎(chǔ)。
1磁懸浮隔振平臺(tái)結(jié)構(gòu)設(shè)計(jì)及模態(tài)分析
磁懸浮隔振平臺(tái)包括浮子、定子及由矩形線(xiàn)圈、永磁體組成的作動(dòng)器等,見(jiàn)圖1。洛倫茲力作動(dòng)器作為實(shí)現(xiàn)隔振的主要單元均具有一個(gè)自由度,為實(shí)現(xiàn)空間六自由度隔振,配8個(gè)作動(dòng)器共同作用。在外界擾動(dòng)下定子發(fā)生六自由度移動(dòng)及轉(zhuǎn)動(dòng);帶線(xiàn)圈的浮子通過(guò)洛倫茲力作用懸浮于定子上方,因定子與浮子間存在供電電纜與信號(hào)線(xiàn)纜,定子的振動(dòng)通過(guò)線(xiàn)纜傳遞給浮子,據(jù)測(cè)量系統(tǒng)獲得浮子、定子的振動(dòng),通過(guò)調(diào)節(jié)線(xiàn)圈電流控制每個(gè)作動(dòng)器輸出的洛侖茲力,消除浮子振動(dòng),實(shí)現(xiàn)振動(dòng)隔離。

圖1 磁懸浮隔振平臺(tái)結(jié)構(gòu)示意圖(單位:mm) Fig.1 Schematic diagram of maglev vibration isolation platform
為提高隔振平臺(tái)結(jié)構(gòu)剛度,減小平臺(tái)質(zhì)量,支撐板采用剛度大、質(zhì)量小的蜂窩鋁板材料。由于隔振平臺(tái)的定子位于擾動(dòng)源中,定子的基頻需大于隔振頻率范圍,磁懸浮隔振平臺(tái)設(shè)計(jì)頻率為0.1~100 Hz。為驗(yàn)證定子結(jié)構(gòu)是否滿(mǎn)足要求,建立蜂窩鋁板結(jié)構(gòu)的三維模型,借助有限元軟件分析獲得定子前三階模態(tài),見(jiàn)圖2。
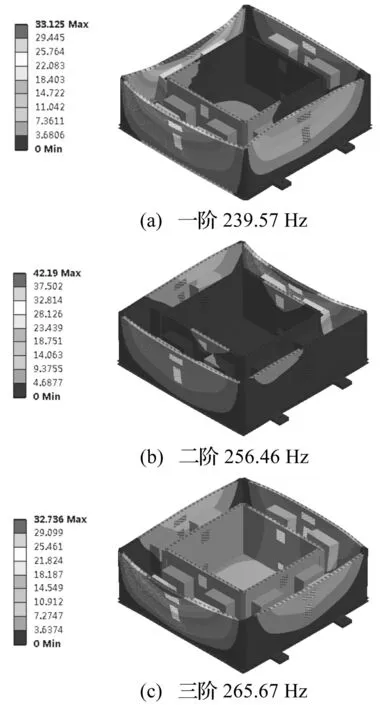
圖2 定子模態(tài)分析結(jié)果 Fig.2 Modal analysis results of the stator
2六自由度非線(xiàn)性動(dòng)力學(xué)方程建立
利用牛頓歐拉方程推導(dǎo)磁懸浮隔振平臺(tái)浮子的六自由度運(yùn)動(dòng)微分方程,為建立面向控制的系統(tǒng)動(dòng)力學(xué)模型,研究受擾動(dòng)的隔振平臺(tái)浮子質(zhì)心絕對(duì)加速度水平及浮子與定子的相對(duì)位置,獲得關(guān)于控制量表達(dá)式。浮子在空間慣性坐標(biāo)系下的位姿實(shí)時(shí)變化,動(dòng)力學(xué)方程中需含由線(xiàn)纜傳遞、來(lái)自定子的間接擾動(dòng)及浮子所受直接擾動(dòng),具有較強(qiáng)的非線(xiàn)性特性。隔振系統(tǒng)空間幾何模型見(jiàn)圖3。

圖3 隔振系統(tǒng)空間幾何模型 Fig.3 Space geometric model of the vibration isolation system
式中:c=cos(),s=sin(),1=θx,2=θy,3=θz。
據(jù)小角度假設(shè)簡(jiǎn)化得
(2)
坐標(biāo)系間變換關(guān)系為
e=TE
(3)
設(shè)浮子的質(zhì)量為m,作用于浮子的外力F包括直接作用于浮子上的外力Fd,線(xiàn)纜產(chǎn)生的繞動(dòng)力Fu及作動(dòng)器產(chǎn)生的主動(dòng)控制力Fc(c=1,…,8);浮子的總力矩包括直接作用的外力產(chǎn)生的外力矩Md,線(xiàn)纜產(chǎn)生的力矩Mu及作動(dòng)器產(chǎn)生的主動(dòng)控制力矩Mc(c=1,…,8)。浮子的運(yùn)動(dòng)微分方程可寫(xiě)為
(4)

據(jù)空間向量幾何關(guān)系,浮子質(zhì)心絕對(duì)加速度為
(5)

平臺(tái)移動(dòng)方程可寫(xiě)成
(6)
慣性坐標(biāo)系下平臺(tái)運(yùn)動(dòng)的歐拉方程為
(7)
代入狀態(tài)空間變量,合并移動(dòng)方程與轉(zhuǎn)動(dòng)方程,得平臺(tái)六自由度剛體運(yùn)動(dòng)微分方程為
(8)
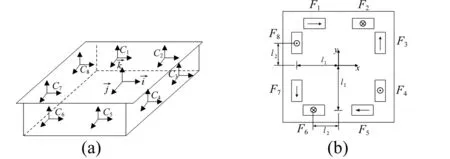
圖4 作動(dòng)器布局 Fig.4 Configuration of actuators
圖4(a)為作動(dòng)器繞浮子坐標(biāo)系Z軸逆時(shí)針布局,為簡(jiǎn)化運(yùn)動(dòng)微分方程,設(shè)各作動(dòng)器坐標(biāo)系與浮子坐標(biāo)系方位一致,即作動(dòng)器坐標(biāo)系方位角相對(duì)于浮子坐標(biāo)系為0°。定義作動(dòng)器基向量為ec=[icjckc]T(c=1,2,…,8),則作動(dòng)器坐標(biāo)系基向量與浮子坐標(biāo)系基向量間轉(zhuǎn)換關(guān)系可表示為
ec=Tce=e
(9)
作動(dòng)器產(chǎn)生的力在慣性坐標(biāo)系中可表示為
(10)
據(jù)圖4(b)的作動(dòng)力分布定義含力方向意義的作動(dòng)器各力向量為
(11)
基于洛倫茲力原理,作動(dòng)器產(chǎn)生的力與電流I、磁感應(yīng)強(qiáng)度B及線(xiàn)圈有效長(zhǎng)度L成正比,因磁場(chǎng)的非線(xiàn)性特性,洛倫茲力亦具有非線(xiàn)性特性,每個(gè)作動(dòng)器產(chǎn)生的作動(dòng)力在數(shù)值上可表示為
Fc=BIL
(12)
式(11)中每個(gè)作動(dòng)力均可表示為式(12)形式。記作動(dòng)力的方向矩陣為

則8個(gè)作動(dòng)器產(chǎn)生作用于浮子的合力在慣性系中表示為
(13)
(14)

rTE-θT(ruiT)~E
(15)
由線(xiàn)纜產(chǎn)生的擾動(dòng)力可寫(xiě)為
(16)
(17)

(18)
(19)
作用于浮子的總力、總力矩可表示為
(20)
(21)
將力、力矩表達(dá)式寫(xiě)成含狀態(tài)變量的矩陣形式并代入式(8),得平臺(tái)六自由度動(dòng)力學(xué)方程為
(22)
由式(22)知,系數(shù)矩陣隨時(shí)間變化,已理論上驗(yàn)證系統(tǒng)的非線(xiàn)性特性。
3浮子在不同激勵(lì)下的動(dòng)力學(xué)響應(yīng)
基于外部環(huán)境擾動(dòng)特性,據(jù)磁懸浮隔振平臺(tái)的應(yīng)用場(chǎng)合,研究不同擾動(dòng)作用下浮子與定子相對(duì)位置響應(yīng)及浮子質(zhì)心絕對(duì)加速度響應(yīng)為進(jìn)一步設(shè)計(jì)合理的控制器提供理論基礎(chǔ)。仿真所需系統(tǒng)參數(shù)為:質(zhì)量m=16 kg,浮子坐標(biāo)系下線(xiàn)纜安裝點(diǎn)為[-130,-204,38.09](mm)及[130,204,38.09](mm);外部繞動(dòng)力作用點(diǎn)為[51.48,59.31,-49.45](mm);作動(dòng)器在浮子坐標(biāo)系中的安裝位置為[-77.4,191.29,32.91] (mm);[80.2,192.29,33.31](mm);[191.1,77.79,32.91] (mm);[192.1,-79.81,33.31] (mm);[77.4,-190.71, 32.91](mm);[-80,-191.71,33.31](mm);[-190,-77.21, 32.91](mm);[-191,79.81,33.31](mm);浮子坐標(biāo)系下對(duì)質(zhì)心的轉(zhuǎn)動(dòng)慣量張量、剛度矩陣及阻尼矩陣為
給定子加沿慣性X軸方向幅值2 mg、頻率6 Hz的正弦加速度激勵(lì),所得浮子受正弦激勵(lì)擾動(dòng)的響應(yīng)見(jiàn)圖5。通過(guò)分析可知,系統(tǒng)的響應(yīng)與質(zhì)量、剛度、阻尼、固有頻率及激勵(lì)頻率有關(guān),因系統(tǒng)耦合非線(xiàn)性作用,移動(dòng)運(yùn)動(dòng)也會(huì)引起系統(tǒng)的轉(zhuǎn)動(dòng)運(yùn)動(dòng)。
給定子加沿慣性X軸方向的階躍加速度激勵(lì)y=0(x<0)及y=1(x≥0),所得浮子受擾動(dòng)后響應(yīng)見(jiàn)圖6,可見(jiàn)轉(zhuǎn)動(dòng)響應(yīng)因系統(tǒng)的耦合非線(xiàn)性作用所致。
給浮子加沿浮子坐標(biāo)系x軸方向階躍加速度激勵(lì)y=0(x<0)及y=1(x≥0),所得浮子受擾動(dòng)響應(yīng)見(jiàn)圖7。圖中轉(zhuǎn)動(dòng)響應(yīng)亦由系統(tǒng)的耦合非線(xiàn)性作用引起。

圖6 浮子對(duì)作用于定子的階躍激勵(lì)響應(yīng) Fig.6 Response of the floater to step excitation of the stator
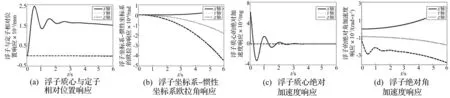
圖7 直接作用于浮子的階躍激勵(lì)響應(yīng) Fig.7 Response of the floater to step excitation of the stator
通過(guò)系統(tǒng)對(duì)不同激勵(lì)作用下的動(dòng)力學(xué)響應(yīng)仿真分析知,系統(tǒng)為耦合非線(xiàn)性作用,為抑制浮子運(yùn)動(dòng)狀態(tài),需據(jù)所得慣性坐標(biāo)系下定子與浮子間相對(duì)位置及絕對(duì)加速度設(shè)計(jì)合理的控制器。
4結(jié)論
通過(guò)介紹基于洛侖茲力原理的磁懸浮隔振系統(tǒng),用有限元法分析定子模態(tài),結(jié)論如下:
(1)結(jié)構(gòu)模態(tài)不在隔振頻率范圍內(nèi),滿(mǎn)足微振動(dòng)隔振需求。基于牛頓歐拉方法建立面向控制的六自由度非線(xiàn)性動(dòng)力學(xué)模型,可研究不同種類(lèi)擾動(dòng)力作用下的動(dòng)力學(xué)響應(yīng),驗(yàn)證動(dòng)力學(xué)模型。
(2)據(jù)動(dòng)力學(xué)方程所求浮子質(zhì)心與定子相對(duì)位置及浮子絕對(duì)加速度,可作為設(shè)計(jì)合理的控制策略基礎(chǔ)。
參考文獻(xiàn)
[1]Kamesh D, Pandiyan R, Ghosal A. Modeling, design and analysis of low frequency platform for attenuating micro-vibration in spacecraft[J]. Journal of Sound and Vibration, 2010, 329(17): 3431-3450.
[2]Cobb R G, Sullivan J M, Das A, et al. Vibration isolation and suppression system for precision payloads in space[J]. Smart Materials and Structures, 1999, 8(6): 798-812.
[3]關(guān)新, 王光遠(yuǎn), 梁魯, 等. 空間相機(jī)低頻隔振系統(tǒng)及試驗(yàn)驗(yàn)證[J]. 航天返回與遙感, 2012, 32(6): 53-61.
GUAN Xin, WANG Guang-yuan,LIANG Lu, et al. Experimental demonstration of a low frequency isolation system for high resolution optical payload[J]. Spacecraft Recovery & Remote Sensing, 2012, 32(6): 53-61.
[4]王曉雷, 楊慶俊, 鄭鋼鐵. 整星主動(dòng)隔振平臺(tái)研究[J]. 宇航學(xué)報(bào), 2007,28(2):438-441.
WANG Xiao-lei, YANG Qing-jun, ZHENG Gang-tie. Study of Whole-Satellite Active Vibration Isolation Platform[J]. Journal of Astronautics, 2007, 28(2): 438-441.
[5]Grodsinsky C M, Whorton M S. Survey of active vibration isolation systems for microgravity applications[J]. Journal of Spacecraft and Rockets, 2000, 37(5): 586-596.
[6]Zhu W H, Tryggvason B, Piedboeuf J C. On active acceleration control of vibration isolation systems[J]. Control Engineering Practice, 2006, 14(8): 863-873.
[7]Jackson M, Kim Y, Whorton M S. Design and analysis of the g-LIMIT baseline vibration isolation control system[C]. Proceedings of the AIAA Guidance, Navigation, and Control Conference,2002: 2002-5019.
[8]宋文榮,于國(guó)飛,王延風(fēng),等. 磁懸浮微進(jìn)給機(jī)構(gòu)研究[J]. 中國(guó)機(jī)械工程, 2003, 14(13): 1090-1093.
SONG Wen-rong, YU Guo-fei, WANG Yan-feng, et al. Research on micro feed mechanism based on magnetic levitation technology[J]. China Mechanical Engineering, 2003, 14(13): 1090-1093.
[9]Kim W, Trumper D L. High-precision magnetic levitation stage for photolithography[J]. Precision Engineering, 1998, 22(2): 66-77.
[10]郝曉紅, 梅雪松, 張東升, 等. 新型磁懸浮精密定位平臺(tái)的研究[J]. 西安交通大學(xué)學(xué)報(bào), 2005, 39(9): 937-940.
HAO Xiao-hong, MEI Xue-song, ZHANG Dong-sheng, et al. New magnetically levitated precision positioning stage[J]. Journal of Xi’an Jiaotong University, 2005, 39(9): 937-940.
[11]魏璀璨, 王永, 陳紹青, 等. 磁懸浮隔振器分塊歸一化 LMS 算法控制研究[J]. 振動(dòng)與沖擊, 2012, 31(18): 100-103.
WEI Cui-can, WANG Yong, CHEN Shao-qing, et al. Control of an electromagnetic suspension vibration isolator based on block normalized LMS algorithm[J]. Journal of Vibration and Shock, 2012, 31(18): 100-103.
[12]Muller T, Hurlebaus S, Stobener U,et al. Modeling and control of an active vibration isolation system[C]//Proceesings of the International Modal Analysis Conference IMAC, Orlando, FL, 2005.
[13]Beadle B M, Hurlebaus S, St?bener U, et al. Modelling and parameter identification of an anti-vibration system[C]// Proceedings of SPIE: Smart Structures and Structural Health Monitoring. SPIE, Bellingham, 2005.
[14]Kerber F, Hurlebaus S, Beadle B M, et al. Control concepts for an active vibration isolation system[J]. Mechanical Systems and Signal Processing, 2007, 21(8): 3042-3059.
[15]Zenga A L Y. Iterative siso feedback design for an active vibration isolation system[R]. Traineeship Report, 2005.
[16]Hampton R, Tryggvason B, Decarufel J, et al. The microgravity vibration isolation mount: a dynamic model for optimal controller design[R]. NASA Technical Memorandum 107478, 1997.
[17]李宗峰,劉強(qiáng),任維佳. 空間高微重力主動(dòng)隔振系統(tǒng)動(dòng)力學(xué)建模[J]. 振動(dòng)與沖擊, 2010, 29(7): 1-4.
LI Zong-feng, LIU Qiang, REN Wei-jia. Dynamic modeling for a space high quality microgravity active vibration isolation system[J]. Journal of Vibration and Shock, 2010, 29(7): 1-4.
[18]Edberg D L, Wilson B W. Design and testing of reduced-stiffness umbilicals for Space Station microgravity isolation[J]. Journal of Spacecraft and Rockets, 2001, 38(4): 563-568.