基于模糊自適應PID控制的礦熱爐電極調節系統設計
2016-01-18 10:31:38牛群峰崔伯淵
自動化與儀表 2016年11期
關鍵詞:系統
牛群峰,崔伯淵,王 莉
(河南工業大學 電氣工程學院,鄭州 450001)
礦熱爐是生產鐵合金的主要設備,通過礦熱爐冶煉生產的合金占我國總鐵合金產量的很大比例。礦熱爐的電極升降系統是整個礦熱爐冶煉控制的關鍵部分,利用電極與爐料間產生的高溫電弧來融化金屬和礦石,弧區溫度一般可達到3000℃以上。礦熱爐的電極調節系統的對象是弧長,但是不能通過合適的檢測裝置測得,因此只能通過改變電極的位置來調節弧長,從而控制電流的大小。所以設計電極控制系統實現快速調節電極位置、保持恒定的電弧長度、維持電壓和電流比值的恒定,以減少電弧電流的波動,使輸入功率穩定,保證礦熱爐優質高產和安全運行具有重要意義[1]。
在工業控制過程中,PID控制是歷史最悠久、生命力最強的控制方法,主要是因為它的控制方式具有直觀、實現簡單和魯棒性好等優點。但是礦熱爐系統是一個隨機干擾十分嚴重的時變系統,它具有非線性、隨機性、多變量、強耦合等特點[2]。目前我國多采用傳統的PID控制作為礦熱爐電極調節系統,但是對于這種具有強非線性及模型參數時變的控制對象,控制效果并不理想,甚至遠遠達不到控制的基本要求[3]。常規PID控制器無法在外界干擾時對系統參數進行優化,而且整個過程的調節時間很長,不僅耗時、耗力、耗能,又降低了產量。因此,采用模糊自適應PID控制電爐電極,這樣可以利用模糊控制的魯棒性和非線性控制的作用來應對電爐的時變和非線性特性。
1 礦熱爐電極調節系統
電流電壓測量回路、互感器、控制器、液壓傳動系統等組成了礦熱爐電極調節系統。電弧的電壓經過電壓測量回路轉化為直流電壓,然后和給定的電壓值相比較,兩者的差值送入控制器,輸出電壓u來控制比例閥的開度,從而控制液壓傳動系統的進油和出油速度對電極的升降進行調節。
恒功率控制、恒電流控制和恒阻抗控制是電極調節的控制策略的常見3種形式。在實際生產中,大部分采用恒電流和恒阻抗的控制策略。其中,由于恒阻抗控制可以有效減小三相電極之間的耦合和電流的波動,使電弧平穩燃燒,因此本文設計的礦熱爐電極調節系統選擇了恒阻抗的控制策略。
恒阻抗控制策略的實質就是通過調節弧長從而來保持電弧阻抗為一恒定值,使電弧電流趨于平穩。圖1所示為恒阻抗電極控制結構圖。Is為電弧電流設定值,Ud為變壓器空載電壓,If為實測電弧電流,Uf為實測電弧電壓。通過控制弧長,即電極位置,使Uf/If=Ud/Is等式恒成立,也就是說維持電壓與電流的比值始終為一個常數,又因為兩者比值為阻抗,所以稱作恒阻抗控制。當實際測得的Uf/If<Ud/Is時,則通過增加弧長,增大電弧電壓、減小電弧電流,使比值趨于給定值;當實際測得的Uf/If>Ud/Is時,則通過減小弧長,減小電弧電壓、增加電弧電流,使比值趨于給定值[4]。
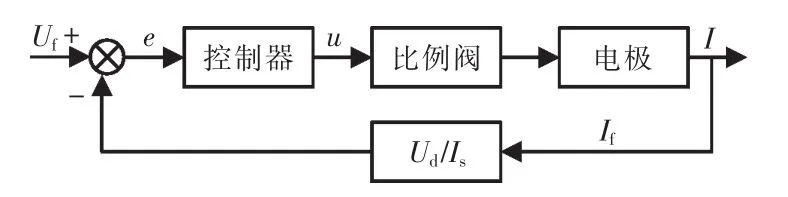
圖1 恒阻抗電極控制系統結構Fig.1 Structure of constant impedance electrode controlling system
2 模糊自適應PID控制器設計
依據文獻[5-7],設計的模糊自適應PID控制器的結構如圖2所示。
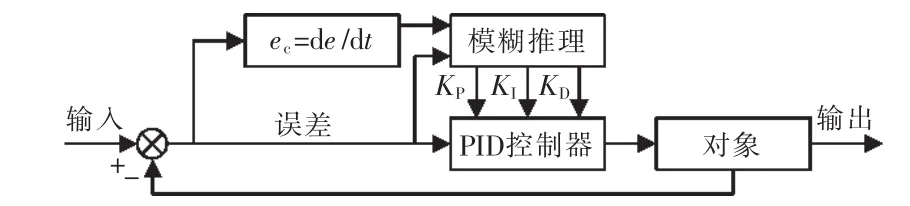
圖2 模糊自適應PID控制結構Fig.2 Functional block diagram of fuzzy adaptive PID controller
所設計的模糊自適應PID控制系統,是以誤差e和誤差的微分ec作為模糊控制器的輸入,PID的3個參數KP、KI和KD作為系統的3個輸出量。其基本原理為系統會將被控制量的實際值與設定值進行比較,從而得到誤差e,之后計算出誤差變化率ec,然后將e和ec分別量化成模糊量。之后根據模糊推理合成規則進行模糊決策,得到模糊控制量KP、KI、KD, 最后將 KP、KI、KD解模糊得到精確值, 作用于PID控制器,從而實現模糊PID控制。定義輸入e和ec的取值范圍為[-5,5],輸出 KP、KI、KD的取值范圍為[-1,1],在模糊規則中,采用 7種不同的模糊語言變量對系統輸入、輸出量的模糊控制論域進行描述,即{負大、負中、負小、零、正小、正中、正大},并且記做{NB、NM、NS、ZO、PS、PM、PB}[8]。 輸入量和輸出量的隸屬函數均選擇三角函數。設計模糊控制規則如表1、表2和表3所示。
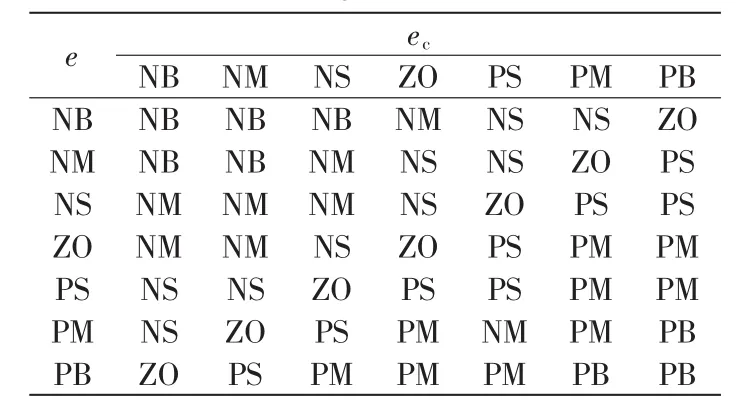
表1 KP模糊控制規則表Tab.1 KPfuzzy control rule table
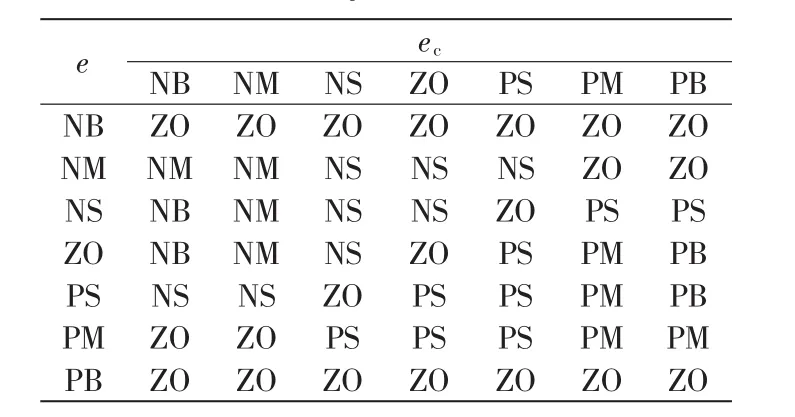
表2 KI模糊控制規則表Tab.2 KIfuzzy control rule table
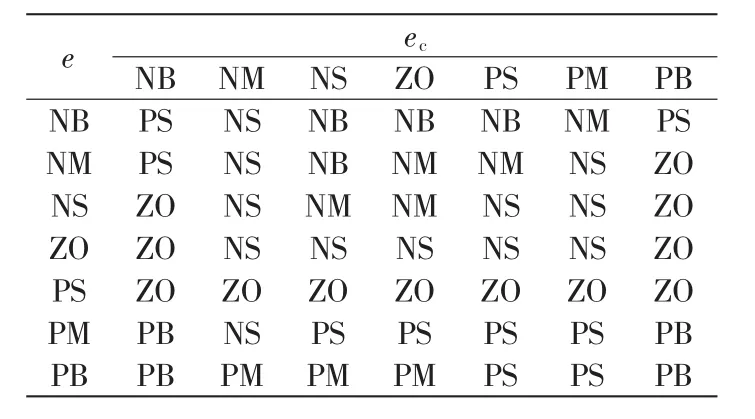
表3 KD模糊控制規則表Tab.3 KDfuzzy control rule table
在確定了模糊控制器的輸入輸出隸屬函數后,根據系統的狀態和模糊控制規則進行推理,得到模糊控制器的輸出KP、KI、KD模糊值,這里擬采用加權平均法來得到精確的輸出控制量,然后將得到的精確控制量KP、KI、KD傳送到PID子系統,由此實現對PID參數的自適應。
3 模糊自適應PID控制算法仿真研究
被控對象電爐可近似為二階對象模型,利用Matlab進行仿真[9]。常規PID和模糊自適應PID的階躍響應曲線如圖3所示,仿真時取KP=5、KI=1.1、KD=0.4。
4 結語
通過仿真結果比對可以看出,采用模糊控制與PID相結合的方法,可以很好地彌補傳統PID控制的不足,克服了二次調節系統的非線性和時變性。模糊自適應PID控制相比傳統PID控制系統,具有較小的超調量,較短的調節時間以及較高的穩定性。因此采用模糊自適應PID控制器能夠有效控制礦熱爐的電極位置,實現節約能源、提高效率、提升企業的經濟效應。
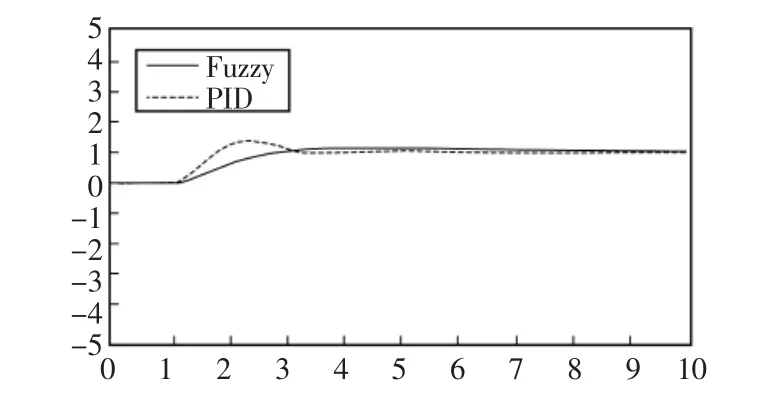
圖3 常規PID和模糊自適應PID的階躍響應曲線Tab.3 Step response curve of normal PID and fuzzy adaptive PID
[1]張琳.電弧爐電極調節系統控制方法的研究[D].沈陽:東北大學,2008.
[2]蒯熔,劉小河.電弧爐電極調節系統的模糊-PID控制研究[J].機床與液壓,2008,36(7):270-272.
[3]白連平,陳秀真,趙韶,等.提高模糊控制器穩態精度的研究[J].西安交通大學學報,2001,35(2):119-223.
[4]趙劍,劉平.運用智能控制技術改進交流電弧爐電極調節器的研究[J].特殊鋼,2011,32(5):22-25.
[5]劉小河,張道成.電弧爐電極自適應控制系統的設計與仿真研究[J].機電工程技術,2003,32(3):78-79.
[6]俞金濤.工業過程先進控制[M].北京:中國石化出版社,2002.
[7]劉金琨.先進PID控制Matlab仿真[M].北京:電子工業出版社,2004.
[8]Bekker JG,Crai IK,Pistorius PC.Modelling and simulation of an electric arc furnace process[J].ISIJ International,1999,39(1):23-32.
[9]Kevin M.Passino,Stephen Yurkovich.Fuzzy Control[M].Beijing:Tsinghua University Press Addison-Wesley,2001.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
