UAV無動力螺線下滑縱向自適應非線性制導律設計
2016-01-19 03:31:13
西北工業大學學報 2015年2期
?
UAV無動力螺線下滑縱向自適應非線性制導律設計
黃得剛1,章衛國1,邵山2,王志剛2,張秀林2,楊立本1
(1.西北工業大學自動化學院,陜西西安710072; 2.沈陽飛機設計研究所,遼寧沈陽110035)
摘要:針對無人機失去推力后如何跟蹤一條螺線下滑路徑的縱向制導問題,提出了一種縱向自適應非線性制導方法。該方法首先利用幾何關系推導出縱向制導律;其次將其轉化為一個二階黏性阻尼振蕩系統,并由此證明了制導律的穩定性;然后為改善制導系統的收斂時間以及抗干擾能力,設計了一種制導律的自適應方案;最后將所提出的方法用于無人機失去推力后螺線下降的縱向路徑跟蹤過程。仿真結果表明,與非自適應制導方法相比,無論有或無常值風擾動,所提出的方法均可提高系統的跟蹤精度。
關鍵詞:無動力;自適應;非線性制導; UAV;螺線下降;粘性阻尼振蕩
近年來,美國NASA和其他國家的一些科研機構逐步開始重視飛行器迫降過程自動化的研究,并取得了一些成果,如美國密歇根州立大學[1],澳大利亞昆士蘭科技大學[2-4]等,這是由于固定翼飛行器具備這種無動力滑翔能力,一旦將這種能力實現自主化,飛行器的安全性以及應用范圍將得到很大提升。
當UAV失去推力后,為了使其安全到達指定降落點,設計跟蹤期望滑行路徑的制導方法是核心任務之一。航跡點跟蹤是一種常規的路徑跟蹤方法,該方法在給定的路徑上選取一系列航跡點,飛行器在這些航跡點上飛過,這樣就可以近似跟蹤一條給定的路徑[5]。然而,航跡點跟蹤方法僅僅是一種近似,隨著跟蹤曲線曲率的增加,這種近似誤差會逐漸增大,另外在給定路徑的情況下,航跡點不能夠為飛行器的控制系統提供路徑曲率的完整信息,而且當噪聲和不確定性存在時,這種開環方法可能會導致飛機位置上的誤差增大。向量場的方法是另外一種路徑跟蹤算法。向量場路徑跟蹤算法在期望路徑周圍構建一個導引飛機想期望路徑靠近的向量場,該方法在魯棒性方面是顯著的,可以保證飛機漸近收斂到期望的路徑,并且跟蹤誤差為零。但是從實際應用的角度出發,該方法的在線計算量大,不適合實時的應用[6]。Park提出了一種簡單實用的制導方法,類似于導彈的比例導航制導方法,該方法簡單實用,而且該方法在有動力的飛機上得到了實際飛行驗證[7],雖然該方法在有動力飛機的制導中較為有效,但是針對飛機無動力滑翔這一特殊情況,該方法的效果并非十分理想,這是因為在該制導律的設計中,飛機到期望軌跡的參考點距離是固定的,這樣橫向制導律的輸出完全由滑翔的速度來決定,這使得縱向速度的變化對橫向制導會產生影響,降低橫向的制導精度。Pau提出了一種自適應的制導策略[8],該制導策略在距離給定路徑較遠時會產生較大的側向加速度,而距離較近時產生較小的加速度,這樣加速了制導算法的收斂時間,但是該方法設計過程復雜,計算量大,對于實時性要求高的無動力滑翔狀態來說并不適用,這是因為如果路徑規劃系統產生了安全返回的路徑,如果在制導系統中產生了較大延時,會對飛機的無動力安全著陸帶來不利的影響。從控制的角度講,為了讓飛機平穩返回機場,縱向需要控制滑翔速度,橫向需要控制傾斜角和側滑角來調整航向;從制導的角度講,縱向制導律輸出需要跟蹤的理想滑行速度,而該速度恰是橫向制導指令的輸入,當滑翔速度出現擾動時,會立刻影響到橫向制導的跟蹤精度,從而降低了整個制導系統的跟蹤精度,同時陣風對無動力無人機的影響十分顯著,所以為了提高無動力滑行的制動精度,本文基于自適應的思想,提出了一種跟蹤下滑螺線的縱向自適應非線性制導方法,并將該方法用于無人機無動力螺線下滑的制導過程,仿真結果表明,分別在有無常值風擾動的情況下,相比于非自適應的制導方法,本文提出的方法均提高了系統的跟蹤精度。由于發動機故障和天氣災害是航空事故的主要因素[9],本文研究的前提假設為發動機失效故障,操縱面偏轉正常,在此基礎上設計無動力滑翔的制導律。
1 縱向非線性制導律的設計
如圖1所示,當飛機向跟蹤一條給定曲線路徑時,需要在該路徑上選取一個參考點Pref,然后向參考點做半徑為R的圓弧靠近,L1為飛機當前位置到參考點之間的距離,η為飛機當前位置和參考點之間的直線與空速V的夾角,該角度用于計算需要產
生的橫向加速度ascmd,即

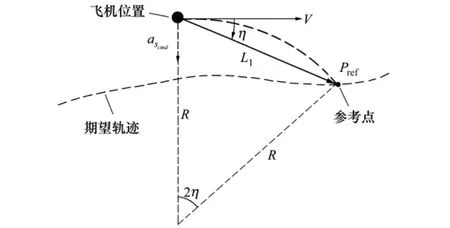
圖1 制導的幾何邏輯
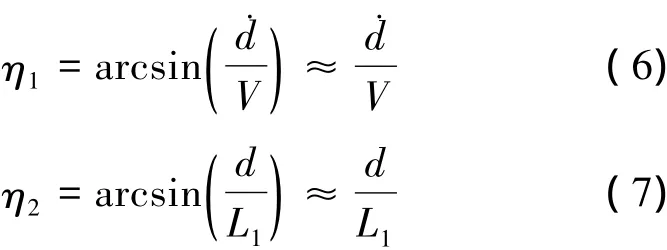
縱向幾何制導邏輯如圖2所示,由于采用潛下滑角滑行,故可對η和η1做小角度假設
sinη≈η,sinη1≈η1(2)
螺線下降過程采用笛卡爾坐標系下的螺線方程

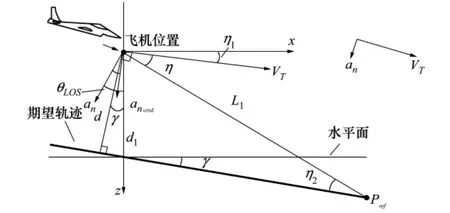
圖2 縱向幾何制導邏輯
式中,ω為勻速螺線下滑的偏航角速率,R為螺線軌跡半徑,t為飛行時間,γ為航跡角。
則飛機當前高度和期望軌跡的高度差d1為

式中,XD為飛機當前高度,z0為給定軌跡的初始高度。
又知
然而縱向加速度指令并不是沿d方向的加速度指令,往往需要將ancmd加速度指令進行轉換,轉換為沿d方向的加速度指令,此時有

由于縱向采用空速控制器,所以當得到縱向過載時,需要將縱向過載轉換為所需的空速指令,則
式中,VD為飛機沿z軸的速度分量,VN為沿x軸的速度分量,VA1和VA2分別為x軸和z軸的期望速度指令,可以通過飛機的輸出的下降速度得到。從而總的速度指令為

2 制導律的穩定性分析
如圖3所示。
圖3 下滑跟蹤直線示意圖
而橫向加速度指令an由(1)式確定。
假設d>L1,-<η<,選取Lyapunov函數

由圖3可知

將(15)式代入(14)式可得

易知(16)式是正定函數,對時間t求導可得

將(12)式、(13)式、(15)式代入(17)式可得

又由于

從而(18)式變為

3 自適應方法
觀察(8)式可以發現,該縱向制導律可以近似為一個PD控制器,其中空速V和距離L1共同決定了PD控制器的增益,然而本文縱向采用空速控制器,目的是將空速穩定在一個給定值上,這樣空速V對該制導律的增益影響不大,主要的影響增益的量是距離L1的大小。
根據上述小角度假設可知,η2較小,則有

從而方程(8)式可變為

由0<ζ<1知,制導律(22)具有欠阻尼特性,由衰減系數公式σ=ζωn可知,當ζ固定時,選擇合適的自然頻率ωn,可以改善該制導律的衰減時間。我們希望當飛機到給定路徑的距離大時,控制器產生大的縱向加速度信號,距離減小時,橫向加速度信號的也隨著減小,同時具備抗陣風干擾的能力,由(22)式可知,只調整參數L1就可以調整制導律的自然頻率,也就可以調整縱向加速度震蕩的衰減速率。為了對參數L1進行優化,本文設計了如下自適應方法。假設距離參數L1具有如下

式中,t為時間間隔,KP,KD和KI為自適應調整參數,為了使得(22)式的通解
快速收斂到零,其中d0、0分別為d、的初值,設計如圖4所示的自適應調整結構。

圖4 自適應結構圖
結構圖中的學習法則采用改進的有監督Hebb學習算法,這樣迭代優化算法如下[16]:
式中ηI,ηP,ηD分別為積分、比例、微分的學習速率,K為神經元的比例系數,K>0,w為神經元的連接權值,e為期望輸入和實際輸出之間的誤差。
4 仿真結果
本文采用matlab2010a下的Simulink環境來對無人機無動力下滑過程進行仿真。根據配平結果給出期望跟蹤的螺旋線軌跡,然后利用制導與控制系統驗證本文提出的自適應制導律的有效性,同時采用到給定路徑的平均偏移距離作為衡量該制導與控制系統的性能指標,該性能指標形式如下

式中,d-dcmd為飛機到給定路徑的偏移距離。
本文仿真時間設定為300 s,初始位置設定為x = 0,y = 2 000,z = 3 000(單位為m),初速度為31. 197 5 m/s,三維螺旋線跟蹤圖解如圖5所示,實線是給定的期望軌跡,虛線為實際飛行的軌跡。
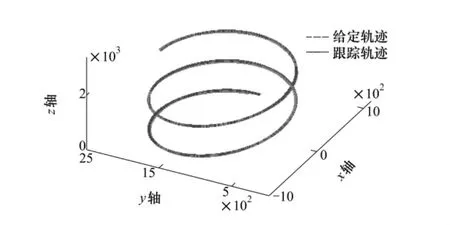
圖5 三維制導與控制系統的跟蹤螺線圖
將三維跟蹤圖分解到縱向平面,同非自適應制導方法的跟蹤效果進行對比,其中實線為給定軌跡,虛線為系統的跟蹤軌跡,圖6和圖7為縱向非自適應跟蹤示意圖和相應的跟蹤誤差,圖8和圖9為自適應跟蹤示意圖及相應的跟蹤誤差。
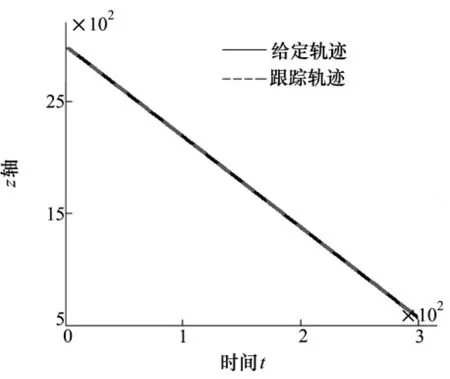
圖6 縱向跟蹤高度跟蹤圖
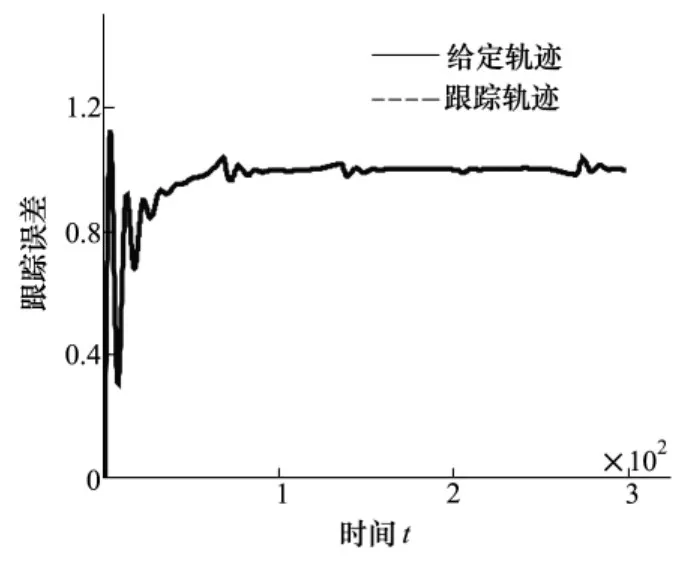
圖7 縱向高度跟蹤誤差圖
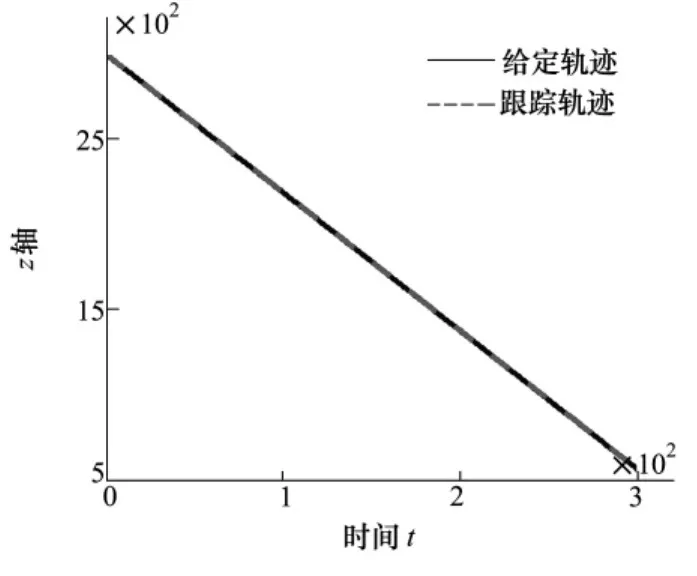
圖8 縱向自適應跟蹤高度跟蹤圖
利用給定的性能指標可以計算常規制導律跟蹤的平均偏差為eMSE= 0. 979 2 m,自適應制導律跟蹤的平均偏差為eMSE=0. 598 9 m。
為了模擬風速的影響,當飛機螺線下降時,在飛機上疊加一個常值風速擾動信號,加了擾動之后的縱向跟蹤誤差如圖10和11所示。
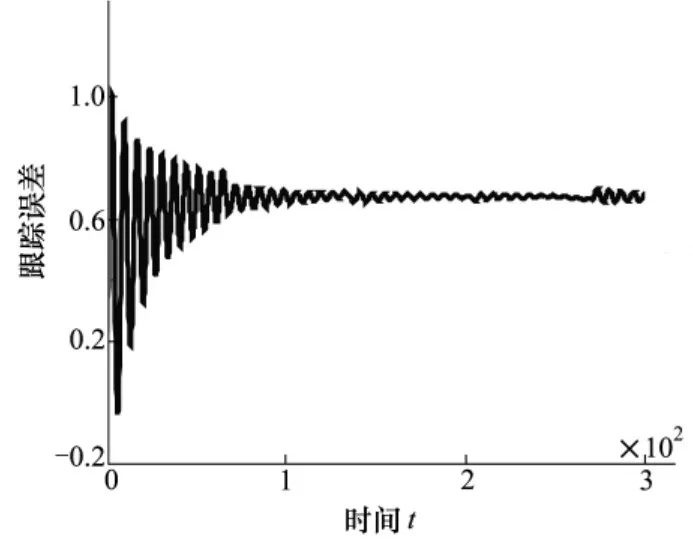
圖9 縱向自適應高度跟蹤誤差圖
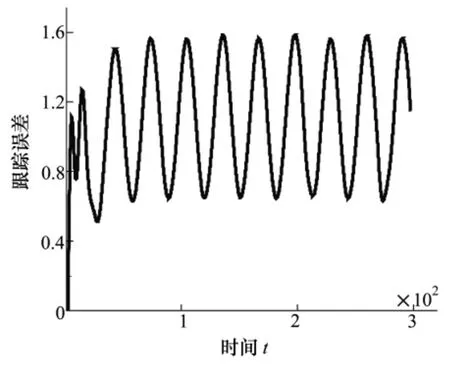
圖10 非自適應縱向跟蹤誤差
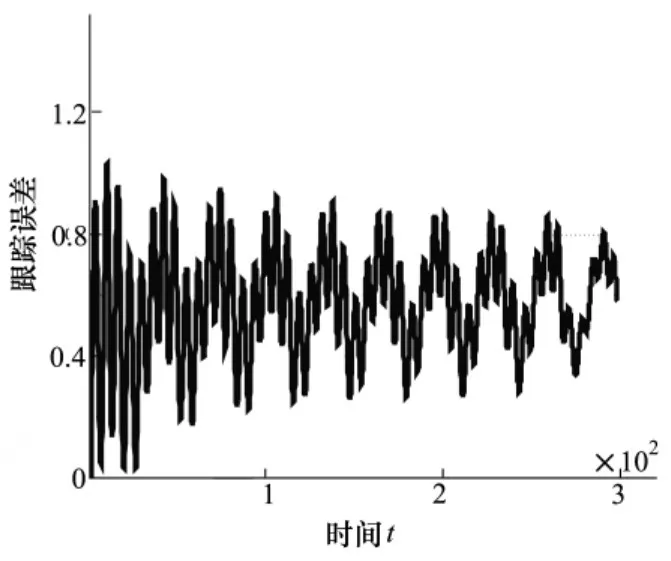
圖11 自適應縱向跟蹤誤差
根據給定的性能指標計算得到非自適應制導律的平均跟蹤偏差為eMSE= 1. 151 9 m,自適應制導律跟蹤的平均偏差為eMSE=0. 623 9 m。
綜上所述,與非自適應方法相比較,無論有無常值風擾動,所提出的制導方法均提高了整體系統的跟蹤精度。
5 結論
在飛行過程因故障突然失去推力時,無人機只能靠滑翔進行無動力返場著陸,此時飛機的長周期變量起主要作用,這使得系統收斂到穩定狀態的時間較為緩慢,為了提高制導系統的收斂速率和跟蹤精度,以及使制導系統具備抵抗常值風擾動的能力,本文針對滑翔階段的螺旋線下滑過程提出了一種縱向自適應非線性制導方法,并同非自適應制導方法進行了對比,從實驗結果可知,有無常值風擾動的情況下,所提出的方法在跟蹤精度上均高于非自適應制導方法,而且本文設計的自適應方法可以在線調整制導系統自然頻率,避免了人工調整參數的費時過程。另外,該方法具備通用性,不但可以應用于無人機的無動力滑翔制導過程,有人飛機的迫降的制導系統也可以采用這種方法。
參考文獻:
[1]Ella A.Emergency Landing Automation Aids: An Evaluation Inspired by US Airways Flight 1549[C]∥AIAA Infotech@ Aerospace Conference,Atlanta,Georgia,2010: 3381-3398
[2]Eng P,Mejias L,Liu X,Walker R.Automating Human Thought Processes for a UAV Forced Landing[J].Journal of Intelligent and Robotic Systems,2010,57(1/2/3/4) : 329-349
[3]Mejias L,Eng P C.Experimental Validation of an Unpowered Unmanned Aerial System: Application to Forced Landing Scenarios[C]∥Digital Proceedings of the 2012 International Conference on Unmanned Aircraft Systems,2012
[4]Mejias L,Eng P.Controlled Emergency Landing of an Unpowered Unmanned Aerial System[J].Journal of Intelligent&Robotic Systems,2013,70(1/2/3/4) : 421-435
[5]Dobrokhodov V.Cooperative Path Planning of Unmanned Aerial Vehicles[J].Journal of Guidance,Control,and Dynamics,2011,34(5) : 1601-1602
[6]Ratnoo A,Hayoun S Y,Granot A,Shima T.Path Following Using Trajectory Shaping Guidance[J].Journal of Guidance,Control,and Dynamics,2014,38(1) : 106-116
[7]Park S,Deyst J,How J P.Performance and Lyapunov Stability of a Nonlinear Path Following Guidance Method[J].Journal of Guidance,Control,and Dynamics,2007,30(6) : 1718-1728
[8]Pau B,Samuel L,Antonios T,Ali S.Adaptive guidance for UAV Based on Dubins Path[C]∥AIAA Guidance,Navigation,and Control (GNC) Conference,2013,American Institute of Aeronautics and Astronautics
[9]Boeing Corporation.Statistical Summary of Commercial Jet Airplane Accidents[EB/OL].(2014-04-09)[2015-04-08].http: / / www.boeing.com/news/techissues/pdf/statsum.pdf.
[10]黃得剛,章衛國,張秀林.無人機無動力滑行橫向自適應非線性制導律設計[J].控制理論與應用,2014,31(11) : 1486-1491
Huang Degang,Zhang Weiguo,Zhang Xiulin.Design of the Lateral Adaptive Nonlinear Guidance Law for Unpowered Unmanned
Aerial Vehicle Gliding[J].Control Theory&Applications,2014,31(11) : 1486-1491 (in Chinese)
Design of Longitudinal Adaptive Nonlinear Guidance Law for Unpowered UAV Helix Gliding
Huang Degang1,Zhang Weiguo1,Shao Shan2,Wang Zhigang2,Zhang Xiulin2,Yang Liben1
(1.Department of Aufomatic Control,Northwestern Polytechnical University,Xi'an 710072,China 2.Shenyang Aircraft design and Research Institute,Shenyang 110035,China)
Abstract:For the longitudinal guidance problem that how to track a helix path when the UAV loses power,we present a method of the nonlinear adaptive longitudinal guidance to track a given falling spiral.Firstly,the guidance law is obtained with the geometric relationship.Secondly,the guidance law is transformed to a two-order viscous system with damping and oscillation,based on which the guidance stability is proved.Then we design an adaptive scheme for the guidance laws in order to improve the convergence time of the system and its anti-disturbance rejection capability.Finally the presented method is used to track the falling spiral when the UAV loses the thrust.The simulation results and their analysis show preliminarily that,compared with other non-adaptive method as,the proposed method improves the tracking accuracy of the system,despite being constantly subjected to wind disturbance.
Key words:unpowered; adaptive; nonlinear guidance; UAV helix gliding; viscous damped oscillations; acceleration; Lyapunov functions
作者簡介:黃得剛(1986—),西北工業大學博士研究生,主要從事飛行器路徑規劃、制導與控制研究。
收稿日期:2014-09-28基金項目:國家自然科學基金(61374032)資助
文章編號:1000-2758(2015) 02-0309-06
文獻標志碼:A
中圖分類號:V249.31