彈道相機(jī)星體標(biāo)校系統(tǒng)設(shè)計與實(shí)現(xiàn)
2016-01-21 18:33:25梁國龍何丁龍
中國科技縱橫 2015年24期
梁國龍 何丁龍
【摘 要】為了提高光電經(jīng)緯儀測角精度,實(shí)現(xiàn)經(jīng)緯儀對目標(biāo)的精確空間定位,本文設(shè)計了外場星體標(biāo)校系統(tǒng)。介紹了系統(tǒng)組成、工作原理及試驗結(jié)果分析。利用xxxx彈道相機(jī)作為載體,進(jìn)行了設(shè)計、加工、運(yùn)輸,在外場進(jìn)行了試驗。試驗結(jié)果表明:該彈道相機(jī)可實(shí)現(xiàn)精確定位,精度優(yōu)于10″,滿足指標(biāo)要求。
【關(guān)鍵詞】星體標(biāo)校 經(jīng)緯儀 彈道相機(jī)
1 引言
星體標(biāo)校是利用恒星在天上的準(zhǔn)確位置作為真值來標(biāo)定光電經(jīng)緯儀的各單項誤差并結(jié)算系統(tǒng)指向精度的方法。光電經(jīng)緯儀從生產(chǎn)到運(yùn)輸?shù)交兀俚皆诨亟?jīng)歷過維修后,其總精度和各個單項誤差都需要計算,利用星體標(biāo)校是一種最簡單也最準(zhǔn)確的方法。
2 系統(tǒng)組成及工作原理
根據(jù)天文學(xué)原理,對于確定的恒星,在已知的時刻,星體相對于測量站的地理位置( , )的視位置(A,E)是準(zhǔn)確可知的,即在某已知時刻T,地球某觀測點(diǎn)的光電經(jīng)緯儀瞄準(zhǔn)星體時,其俯仰角真值E和方位角真值A(chǔ)與測量站的地理位置(λ,Φ)的關(guān)系是確定的的,其關(guān)系式為
式中A為方位角,E為俯仰角,( , )為地理位置, , 為赤經(jīng)和赤緯,SG為真恒星時,1.0027379為平太陽日與恒星日的轉(zhuǎn)換系數(shù)。
星體標(biāo)校采用加拿大的1m60CCD相機(jī),分辨率1024x1024。可見光標(biāo)校分系統(tǒng)是拍星光學(xué)系統(tǒng)。圖像記錄分系統(tǒng)負(fù)責(zé)記錄拍星圖像,隨動分系統(tǒng)負(fù)責(zé)引星,操作與控制分系統(tǒng)負(fù)責(zé)與相機(jī)通訊、引導(dǎo)儀器跟蹤星位置、操作各個分系統(tǒng)完成星體標(biāo)校。系統(tǒng)組成框圖如圖1所示。
圖1 系統(tǒng)組成框圖
系統(tǒng)上電后,操作人員在操作與控制分系統(tǒng)中選擇星號,并根據(jù)星號計算出當(dāng)前時刻星的位置,1m60CCD相機(jī)采集,操作與控制系統(tǒng)引導(dǎo)主機(jī)跟蹤當(dāng)前星體,對采集到的圖像經(jīng)過處理后計算出當(dāng)前系統(tǒng)的實(shí)際指向在通過最小二乘法計算出各單項誤差。
3系統(tǒng)設(shè)計與實(shí)現(xiàn)
相機(jī)采用加拿大的1m60高靈敏度ccd相機(jī),通過自研光學(xué)系統(tǒng),焦距200,視場可達(dá)4°x4°,對星的探測能力為3-5等星,相機(jī)與光學(xué)系統(tǒng)的實(shí)物如圖2所示。
圖2 相機(jī)及光學(xué)系統(tǒng)實(shí)物圖
操作與控制分系統(tǒng)是在Windows XP中文操作系統(tǒng)SP2+操作平臺下,VC++面向?qū)ο缶幊虒?shí)現(xiàn)。充分利用XP操作系統(tǒng)的多任務(wù)多線程機(jī)制,軟件設(shè)計過程中采用模塊化結(jié)構(gòu)。拍星界面如圖3所示。其中主要部分為星庫的顯示,在初始化星庫之后通過點(diǎn)擊星圖進(jìn)行選星,在選擇完星體之后通過引導(dǎo)使光學(xué)系統(tǒng)對星體成像。對圖像進(jìn)行閾值計算、目標(biāo)分割、脫靶量合成后得出光學(xué)系統(tǒng)的實(shí)際指向,與此時的真值進(jìn)行比較,可得出定向差、照準(zhǔn)差、零位差和橫軸差等單項誤差。
圖3 主控軟件界面
4 試驗結(jié)果與分析
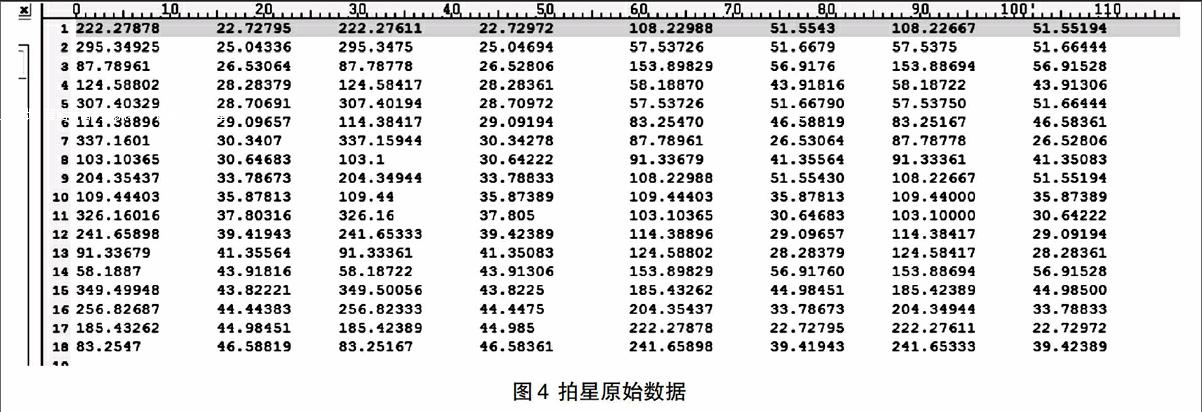
為了驗證系統(tǒng)的測量精度,在xxxx彈道相機(jī)上拍星試驗,記錄當(dāng)天試驗參數(shù):溫度為-2℃,氣壓為1022.50hPa。對積分時間和幀頻進(jìn)行了相應(yīng)設(shè)置后,5等星可清晰成像。在全天區(qū)的方位角度內(nèi)均勻選擇36顆星,俯仰角度控制在30-60度,這個區(qū)間可以有效的降低誤差。然后引導(dǎo)xxxx彈道相機(jī)跟蹤并記錄每一顆星的理論角度和實(shí)際和成角度,從而得到各單項誤差,再用得到的單項誤差計算出xxxx彈道相機(jī)的靜態(tài)精度。試驗得到的原始數(shù)據(jù)如圖4所示。圖中前四列為1-18顆星的數(shù)據(jù),后四列為19-36顆星的數(shù)據(jù)。每一顆星的數(shù)據(jù)為理論方位值、理論俯仰值、實(shí)際方位值、實(shí)際俯仰值。本次試驗得到的定向差為:5.9″,照準(zhǔn)差為:-3.7″,零位差為:-2.1″,橫軸差為:9.8″。通過修正合成角度誤差后得到的指向值與理論恒星角度值的誤差的均方根,在方位上是:4.0″,在俯仰上是7.2″。試驗得到的原始數(shù)據(jù)如圖4所示。
圖4 拍星原始數(shù)據(jù)
5 結(jié)語
本文通過裝載已知恒星庫,設(shè)計了xxxx彈道相機(jī)的星體標(biāo)校系統(tǒng),在總裝某基地進(jìn)行了外場驗證。經(jīng)試驗表明,星庫提供角度準(zhǔn)確,系統(tǒng)跟蹤穩(wěn)定,精度結(jié)算算法高效、精確,精度結(jié)果滿足要求。
參考文獻(xiàn):
[1]劉中富.應(yīng)用GPS授時時角拍星法標(biāo)校測角精度[J].光電工程,2004,31(增刊):1-4.
[2]車雙良.光電經(jīng)緯儀外場星校方法的理論與實(shí)踐[J].光子學(xué)報,2004,33(10):1 -6.
作者簡介:梁國龍(1983—),男,吉林公主嶺人,博士學(xué)位,助理研究員,主要從事數(shù)字圖像處理方面的研究;何丁龍(1988—),男,吉林長春人,工程碩士,研究實(shí)習(xí)員,主要從事光電經(jīng)緯儀設(shè)計和研究。
