低位巷瓦斯抽采條件下采空區遺煤自燃規律研究
2023-03-18 09:24:26范加鋒
工礦自動化 2023年2期
范加鋒
(1. 中煤科工集團沈陽研究院有限公司,遼寧 沈陽 110016;2. 煤礦安全技術國家重點實驗室,遼寧 撫順 113001)
0 引言
礦井瓦斯災害與煤自燃災害嚴重威脅地下煤炭安全開采[1-2]。目前,我國130 余個礦區中,受煤自燃隱患困擾的煤礦超過70%[3]。其中,存在瓦斯與煤自燃共生災害的高瓦斯易自燃礦井不在少數[4-5]。瓦斯抽采可以解決上隅角瓦斯積聚隱患,也會造成采空區漏風加劇,增加遺煤自燃危險性[1]。另外,采空區遺煤自燃會引發瓦斯爆炸[6-7]。因此,針對高瓦斯易自燃礦井建立合理、有效的瓦斯抽采方式,才能達到減少瓦斯災害、緩解遺煤自燃危險性的目的。
我國學者針對瓦斯與煤自燃共生災害問題開展了大量研究。王繼仁等[8]針對西銘礦采用高位巷、埋管立體聯合抽采方式,確定最佳抽采流量為20 m3/min,有效解決了礦井瓦斯超限和煤自燃隱患問題。賈廷貴等[9]基于德寶煤礦工作面的偏Y 型通風方式,采用數值模擬分析了抽采位置及抽采流量對采空區瓦斯分布及煤自燃“三帶”的影響。杜陽等[10]針對塔山煤礦8204?2 工作面遠距離瓦斯抽采技術,通過數值模擬得到了回采長度與自燃帶寬度的正相關關系,提出可采用注氮方式來縮小煤自燃區域。裴曉東等[11]針對高瓦斯易自燃工作面建立了瓦斯與煤自燃耦合數學模型,分析了有無抽采條件下采空區瓦斯與煤自燃共生致災危險區。王飛等[12]對綜采工作面采空區瓦斯抽放、注氮、遺煤自燃三者耦合關系進行分析,確定了最佳瓦斯抽放量和注氮流量分別為700 m3/min,2 200 m3/h。文虎等[13]針對北礦4204 工作面高瓦斯煤層,采用CFD 模擬研究不同抽采條件對遺煤自燃“三帶”分布的影響,根據實際情況確定了進風側注氮、兩隅角封堵等防滅火措施。Wang Chaojie 等[14]研究了3 種不同抽放瓦斯方式對采空區遺煤自燃氧化帶范圍的影響,發現抽采作業造成遺煤自燃危險區在走向、傾向、垂直方向均有不同程度的擴大。杜瀚林等[15]采用FLUENT 軟件對高抽巷瓦斯抽采與遺煤自燃的耦合關系進行了研究,發現自燃“三帶”呈立體分布,在液壓支架后上方存在煤自然發火危險區域。
工作面采空區瓦斯是礦井瓦斯治理的重難點,低位巷瓦斯抽采是解決上隅角瓦斯超限的重要技術措施,但低位巷大流量混合抽采造成采空區漏風嚴重,增加遺煤自燃風險。上述學者針對瓦斯抽采對采空區遺煤自燃的影響進行了不同方面的研究,但對于低位巷布置與抽采流量協同影響采空區遺煤自燃方面的研究較少。本文基于山西呂梁離石賈家溝煤業有限公司(簡稱賈家溝煤礦)10106 工作面實際情況,建立瓦斯擴散?滲流模型、煤自燃流?固?熱耦合模型,分析低位巷抽采對煤自燃致災特性的影響,確立最佳低位巷位置及抽采流量,為防止煤自燃災害提供指導。
1 工作面概況
賈家溝煤礦10106 工作面位于10 號煤層一采區東側,工作面采用“一進一回”的U 型通風方式,采煤工作面走向長1 272 m,傾向長180 m,煤層厚5.79 m,傾角為3~8°。采用全部垮落法管理頂板。進回風巷凈寬5.1 m,凈高5 m。遺煤平均厚度為0.5 m,煤自燃傾向性等級為Ⅱ類,屬于自燃煤層。10號煤層最大瓦斯含量為12.47 m3/t,礦井絕對瓦斯涌出量為137.98 m3/min,相對瓦斯涌出量為42.04 m3/t,為高瓦斯礦井。工作面存在上隅角瓦斯超限問題,綜合礦井生產實踐及其他煤礦治理上隅角瓦斯技術措施,沿10 號煤層頂板(本煤層中)布置低位巷抽采現采空區瓦斯。工作面實際通風量約為1 500 m3/min。在進回風巷內沿巷道底板向采空區各埋設2 條單芯束管,單條束管長150 m,沿采煤工作面進回風巷向外隔30 m 設置1 號和2 號測點,待測點進入采空區后開始監測氧氣濃度。
2 多場耦合數值模型建立
2.1 數學方程
采空區瓦斯擴散?滲流模型及煤自燃流?固?熱模型各場之間存在復雜的耦合關系,如圖1 所示。
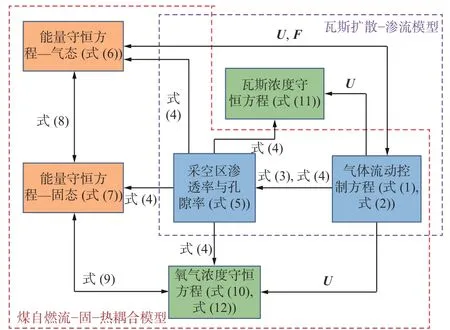
圖1 采空區瓦斯與煤自燃多場耦合關系Fig. 1 Multi fields coupling relationship between gas in goaf and coal spontaneous combustion
假設采空區內部為不可壓縮的理想氣體,且內部漏風滲流為層流流動,因此可以忽略慣性阻力。則有連續性方程:
動量守恒方程:
式中:ε為孔隙率;ρg為空氣密度,kg/m3;U為滲流速度矢量;t為時間,s;p為流體微元上的壓力,Pa; τ為黏性阻力;F為重力體積力;μ為空氣動力黏度,N·s/m2;K為滲透率,m2。
采空區滲透率和孔隙率關系[7]:
式中d為采空區煤體粒徑,d=5 mm。
根據地層沉降現場觀測情況,大部分采空區裂隙符合O 型圈特征,采空區孔隙率可表示為[16]
式中k為垮落帶脹碎系數。
式中:kp,min為壓實后脹碎系數,kp,min=1.1;kp,max為初始垮落帶脹碎系數;a1,a0分別為傾向和走向的脹碎系數衰減率,a1=0.036 8 m?1,a0=0.268 m?1;d1,d0分別為采空區某點與工作面、煤壁的距離,m;ξ1為模型調控因子,ξ1=0.233。
數學模型中的熱質傳輸機制應同時考慮擴散效應和對流效應,流?固耦合熱交換機制為非平衡傳熱模型,則有能量守恒方程:
式中: ρg,ρc分別為空氣、煤體密度,kg/m3;Cpg,Cpc分別為空氣、煤體的比熱容,J/(kg·K);Tg,Tc分別為空氣、煤體溫度,K; λg, λc分別為空氣、煤體的導熱系數,W/(m·K);qgc為流?固交換熱,W/m3;r0為煤體產熱速率[17],W/m3。
式中:hcg為孔隙對流換熱系數,W/(m2·K),表示煤顆粒表面與孔隙內空氣間的熱量交換強度; α為多孔介質內部的比表面積,即單位體積煤顆粒的暴露面積,m?1。
采空區遺煤產熱速率與氧氣消耗呈正相關[18]:
式中:H為低溫氧化階段單位摩爾體積氧氣與煤體反應釋放的熱量,J/mol;S0為煤體耗氧速率,mol/(m3·s)。
采空區組分守恒方程主要針對氧氣和瓦斯2 種成分,即
式中:c0,cm分別為孔隙氧氣和瓦斯濃度,mol/m3;D0,Dm分別為氧氣和瓦斯在空氣中的擴散系數,m2/s;S0,Sm分別為氧氣和瓦斯源項,mol/(m3·s)。
氧氣源項可表示為[19]
式中:w為工作面推進速度影響系數,正常推進時取1;A為指前因子,mol/m3;E為活化能,J/mol;R為氣體常數,8.314 J/(mol·K)。
2.2 三維模型
基于賈家溝煤礦10106 工作面實際情況,采用COMSOL 軟件建立采空區三維模型,如圖2 所示。進回風巷斷面尺寸為5.1 m×5 m,長5 m。采煤工作面斷面尺寸為5 m×4 m,長180 m。采空區模型走向長220 m,遺煤厚度為0.5 m。低位巷位于煤層頂板,設內錯工作面回風巷道長度(內錯距)為L,巷道斷面尺寸為2 m×1.8 m。進風巷入口設置為速度入口(風速為1 m/s,溫度為20 ℃,氧氣體積分數為21%,瓦斯體積分數為0),回風巷設置為自由出口,低位巷出口設置為速度出口,其余界面設置為無滑移固定面(熱通量為0)。全域初始條件:溫度為20 ℃,風速為0,氧氣體積分數為21%,瓦斯體積分數為0。
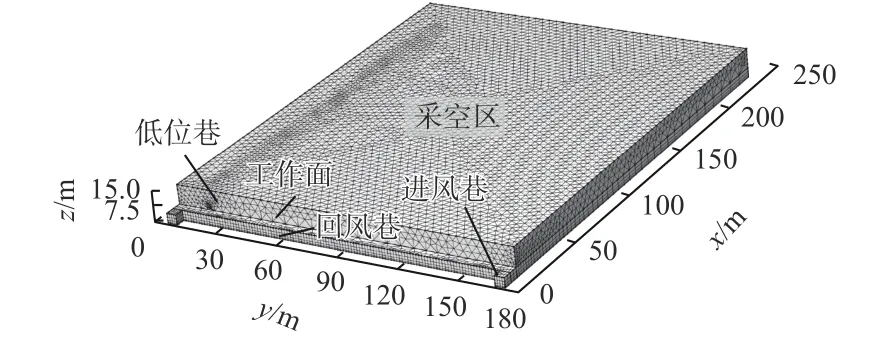
圖2 10106 工作面采空區三維模型Fig. 2 3D model of goaf in 10106 working face
應用有限元法對多場偏微分方程組進行求解,采用全耦合、非穩態求解方法,在單次迭代中求解所有場的解,選擇默認的迭代求解器,時間步長設置為2 h。對數值模型進行以下假設[20-21]:① 不考慮水分相變對煤體升溫過程的影響。② 不考慮煤自燃過程體積及孔隙率變化。③ 煤體和空氣的比熱容、導熱系數為恒定值。④ 各氣體組分之間無化學反應,不存在熱源。⑤ 工作面、進風巷和回風巷風流為紊流,且不考慮粉塵對風流的影響。⑥ 忽略采煤機、液壓支架、工作面人員等引起的風阻。
3 數值模擬結果與分析
3.1 無抽采自燃氧化帶分布規律
無抽采條件下采空區內部滲流特性、自燃氧化帶分布分別如圖3、圖4 所示。一部分新鮮空氣經由靠近進風巷的工作面進入采空區,并在靠近上隅角位置流出采空區,模擬顯示上隅角瓦斯體積分數為2.7%,需進行瓦斯抽采工作。隨著采空區的深入,氧氣濃度逐漸降低,且越靠近回風巷側,下降強度越明顯。氧氣供給源為進風巷,漏風源和漏風匯均靠近工作面;采空區內部煤體滲透率和孔隙率比靠近工作面和兩側煤柱區域的滲透率和孔隙率低,漏風滲流強度較弱;靠近工作面區域的煤體發生氧化反應,釋放熱量的同時會消耗大量氧氣。因此,很難有充足的氧氣運移至采空區內部,造成該處氧氣濃度較低。實測1 號和2 號測點氧氣體積分數為18%的埋深分別為63,30 m,氧氣體積分數為10%的埋深分別為122,69 m。與圖4 比較可看出,實測值與模擬值吻合度較高。實測和模擬結果均顯示回風側采空區自燃氧化帶寬度小于進風側。模擬結果還表明,無抽采條件下自燃氧化帶最大寬度為55.1 m,距離進風巷側煤柱約7 m。
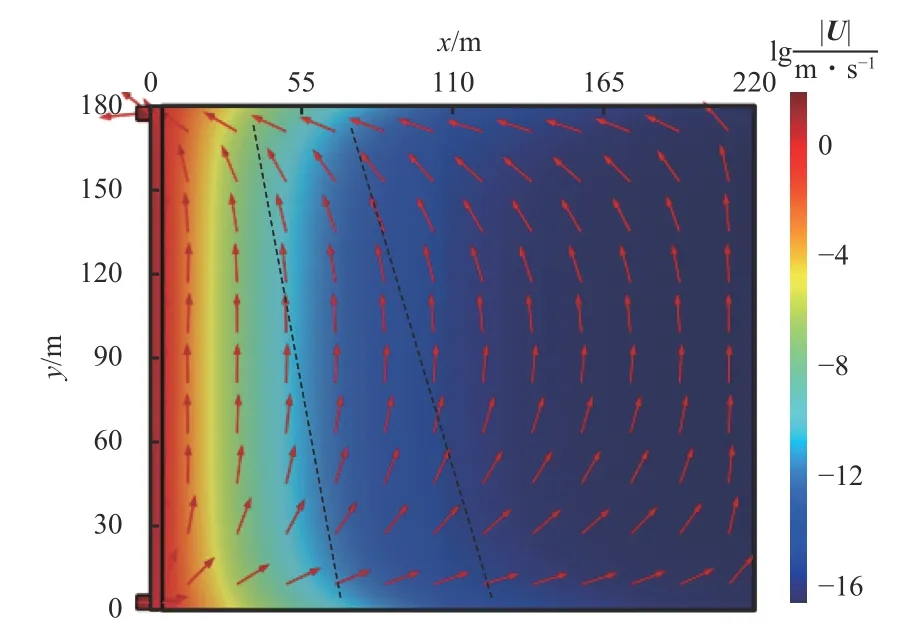
圖3 未抽采條件下采空區滲流特性Fig. 3 Seepage flow characteristic in goaf without gas drainage
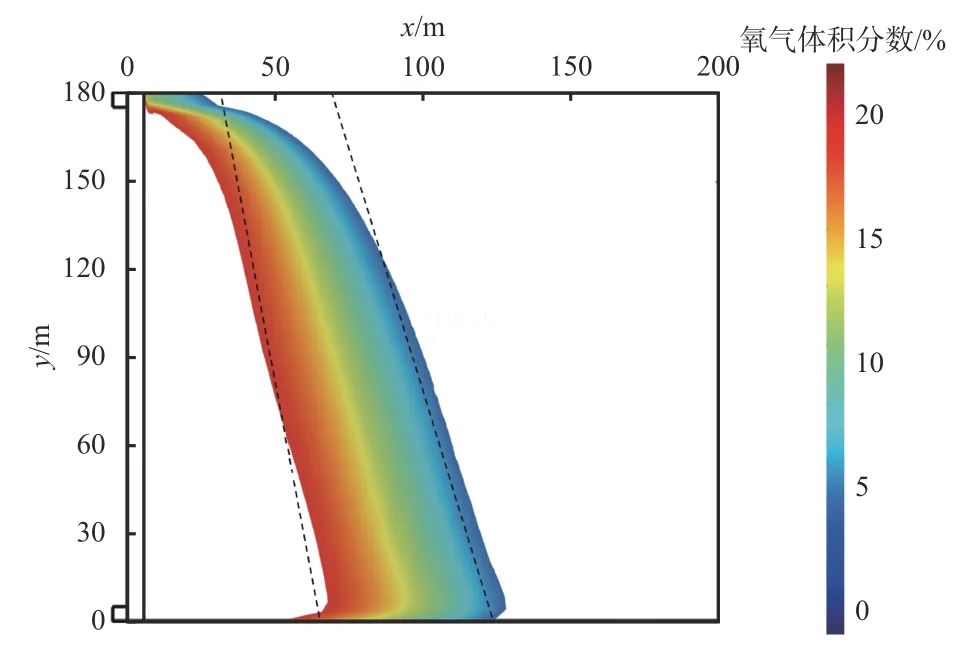
圖4 未抽采條件下采空區自燃氧化帶分布Fig. 4 Distribution of spontaneous combustion oxidation zone in goaf without gas drainage
3.2 低位巷抽采自燃氧化帶分布規律
內錯距L=15 m、抽采流量Q=45 m3/min 時,低位巷瓦斯抽采條件下采空區滲流特性如圖5 所示。忽略采空區內部溫度非均勻性引起的熱風壓影響,低位巷瓦斯抽采條件下的采空區漏風動力主要包括抽采負壓和進回風巷的通風壓差,采空區漏風呈現出典型的“一源兩匯”特征:風流由進風巷側工作面進入采空區,漏風流分別通過低位巷和回風側工作面排出。對比圖3 和圖5 可知,低位巷抽采顯著提升了采空區漏風風速,在采空區內部,低位巷靠近進風側的風速大于回風側風速,說明進入采空區內部的大部分漏風由低位巷排出。
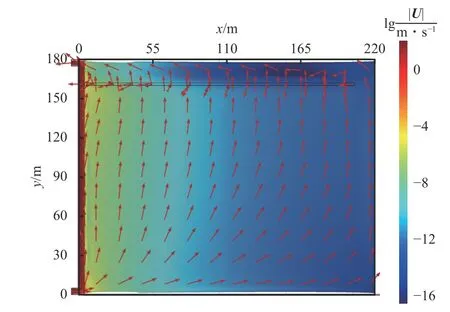
圖5 低位巷瓦斯抽采條件下采空區滲流特性Fig. 5 Seepage flow characteristic in goaf under gas drainage in low-level gateway
不同內錯距條件下上隅角瓦斯濃度變化如圖6所示。可看出瓦斯未抽采時,低位巷的存在對上隅角瓦斯體積分數幾乎無影響,均為2.7%。隨著抽采流量增加,不同內錯距低位巷條件下的上隅角瓦斯濃度均出現下降現象。低位巷內錯距越小,上隅角瓦斯濃度隨抽采流量增加而下降的趨勢越明顯。L=5 m 時,上隅角瓦斯體積分數在Q=45 m3/min 時幾乎為0,主要原因是抽采負壓造成上隅角附近采空區風流流向低位巷,采空區瓦斯不易進入上隅角。當抽采壓力或流量進一步增加時,會導致附近巷道空氣“回流”至采空區,造成提升抽采耗能和增加采空區氧氣供給的雙重負面影響。低位巷內錯距越大,上隅角無瓦斯現象所對應的最小抽采流量越大。由于內錯距與滲流阻力呈正相關,當抽采流量一定時,內錯距越大,上隅角瓦斯濃度越大。另外,當L=45 m,Q<30 m3/min 時上隅角瓦斯濃度幾乎不受瓦斯抽采作業的影響,Q>30 m3/min 時上隅角瓦斯濃度與低位巷抽采流量呈線性減小關系。為保證上隅角瓦斯濃度不超限,不同位置的低位巷所對應的抽采流量應確保上隅角瓦斯體積分數低于1%。
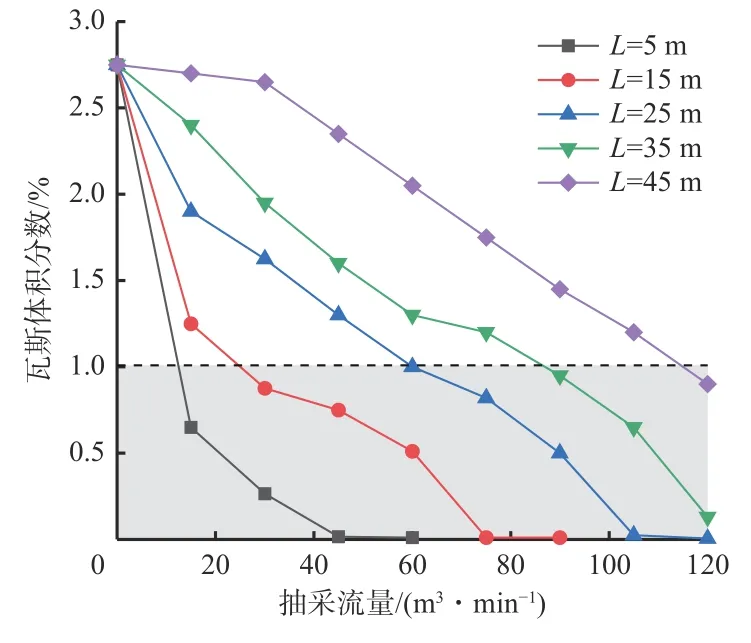
圖6 不同內錯距條件下上隅角瓦斯濃度與抽采流量的關系Fig. 6 Relationship between gas concentration in upper corner and drainage amount under different dislocation distances
L=15 m,Q=15,45,60,90 m3/min 時采空區自燃氧化帶分布如圖7 所示。可看出瓦斯抽采顯著增加了回風側自燃氧化帶寬度,造成回風側自燃氧化帶邊界向采空區深部移動,且隨著抽采流量的增加,該影響更加明顯。這主要是由于抽采流量增加,低位巷負壓增大,由巷道進入采空區的漏風量增加,造成回風側散熱帶寬度顯著增加,自燃氧化帶位置遠離工作面。抽采流量的增加對進風側氧化帶邊界(高濃度氧氣)幾乎無影響,但會促進氧化帶邊界(低濃度氧氣)向采空區內部移動,因此,采空區自燃氧化帶最大寬度隨抽采流量的增加而增大,Q= 0,15,45,60,90 m3/min 對應的自燃氧化帶最大寬度分別為55.1,57.3,59.1,60.8,62.5 m。當抽采流量較大(Q≥60 m3/min)時,自燃氧化帶最大寬度位于采空區中部(距進風巷側煤柱約91 m);當抽采流量較小(Q≤45 m3/min)時,自燃氧化帶最大寬度位置與未抽采條件下近似。另外,回風側氧化帶的寬度和位置更容易受到瓦斯抽采流量變化的影響。當Q=60 m3/min時,由于較強抽采負壓的作用,上隅角附近空氣流入采空區,低位巷回風側自燃氧化帶寬度明顯減小,而低位巷進風側自燃氧化帶寬度增加。
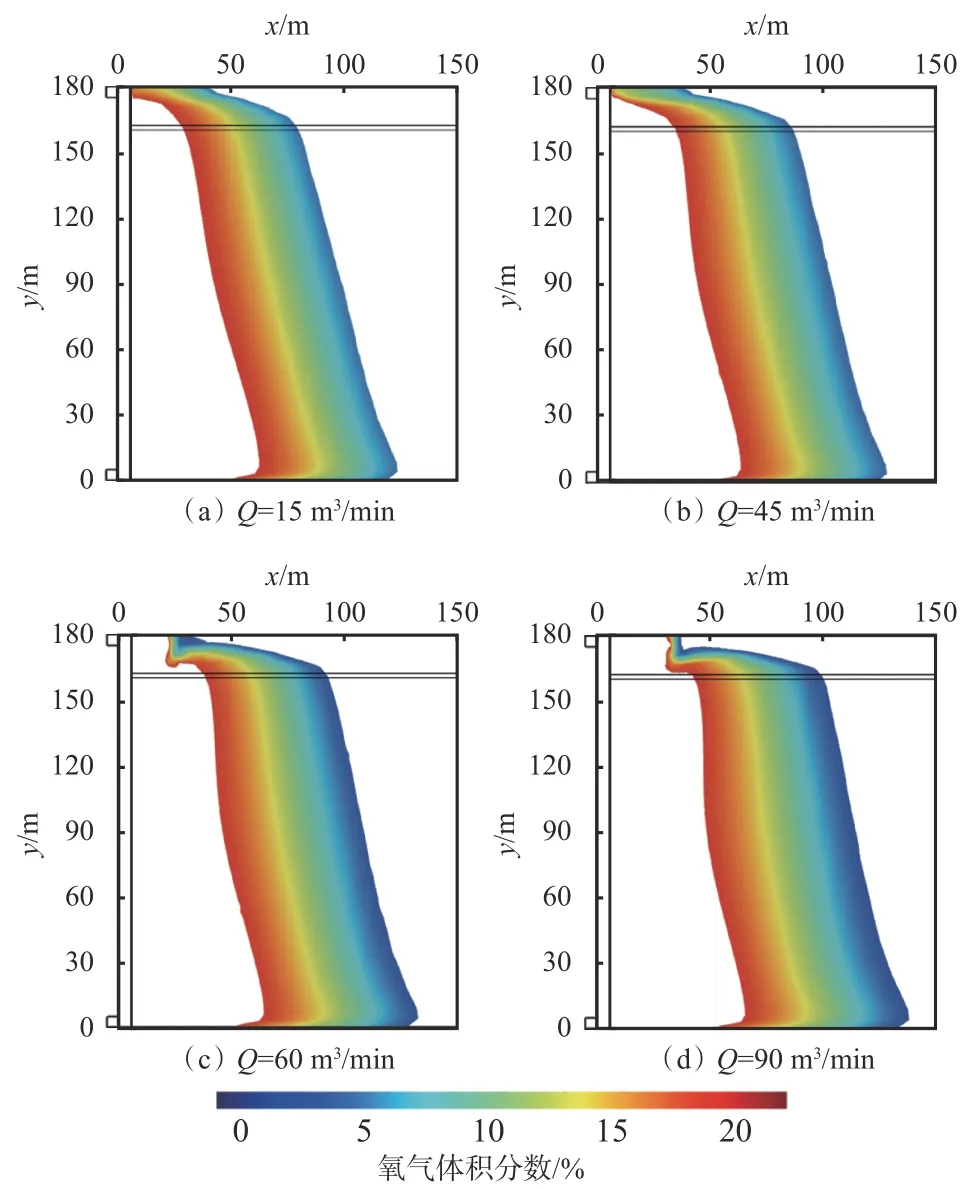
圖7 不同抽采流量條件下采空區自燃氧化帶分布(L=15 m)Fig. 7 Distributions of spontaneous combustion oxidation zone in goaf at different drainage amounts(L=15 m)
Q=45 m3/min,L=5,15,35,45 m 時采空區自燃氧化帶分布如圖8 所示。可看出當L=5 m 時,抽采瓦斯作業增加了低位巷兩側自燃氧化帶的寬度。此時,上隅角附近工作面一部分風流進入采空區,造成回風側自燃氧化帶埋深增加,靠近工作面及采空區中部的自燃氧化帶寬度明顯增加,自燃氧化帶最大寬度相對于未抽采條件下增加了3 m。當L=15 m時,自燃氧化帶在低位巷兩側會出現明顯突變,進風側自燃氧化帶的寬度增加,且邊界(低濃度氧氣)向采空區內部擴展,回風側自燃氧化帶埋深增加。隨著內錯距的增加,自燃氧化帶在低位巷處的突變現象逐漸減弱。當L=35 m 時,自燃氧化帶的形狀與未抽采條件下相似。當抽采流量為45 m3/min 時,內錯距大小幾乎不影響自燃氧化帶最大寬度位置。此時自燃氧化帶的最大寬度比未抽采時增加1.7 m。因此,低位巷內錯距越小,回風側自燃氧化帶寬度越寬,自燃氧化帶面積越大。
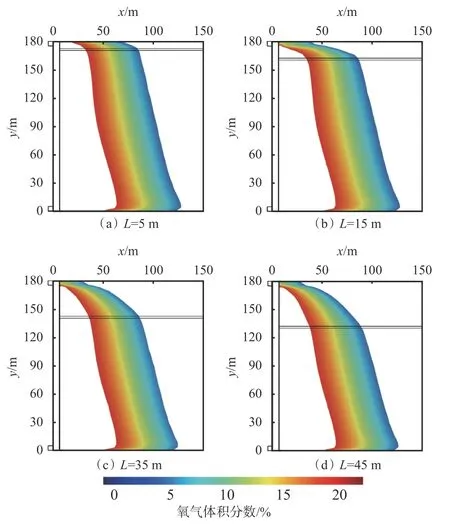
圖8 不同內錯距條件下采空區自燃氧化帶分布(Q=45 m3/min)Fig. 8 Distributions of spontaneous combustion oxidation zone in goaf under different dislocation distances(Q=45 m3/min)
不同內錯距條件下采空區自燃氧化帶最大寬度和最高溫度分別如圖9、圖10 所示。可看出未抽采條件下自燃氧化帶最大寬度為55 m,采空區最高溫度為32.1 °C。隨著抽采流量增加,自燃氧化帶最大寬度和最高溫度均增加。這是由于低位巷負壓抽采瓦斯導致工作面一部分新鮮空氣進入采空區,豐富的氧氣供給造成自燃氧化帶寬度增加,遺煤與氧氣反應加劇。當低位巷內錯距為5 m 時,隨著抽采流量增加,采空區自燃氧化帶最大寬度呈現先快速增長、后緩慢增長的趨勢,最終穩定在63 m 左右。其他內錯距條件下采空區自燃氧化帶最大寬度與抽采流量關系也呈現出類似趨勢。另外,當抽采流量相同時,低位巷內錯距越大,則自燃氧化帶最大寬度越小,采空區最高溫度越低。總體而言,自燃氧化帶最大寬度與最高溫度之間呈正相關。雖然較大的抽采流量和較小的內錯距能夠有效降低上隅角瓦斯濃度,但也會造成自燃氧化帶增大,使煤氧反應加劇,采空區最高溫度升高,增加遺煤自燃風險。
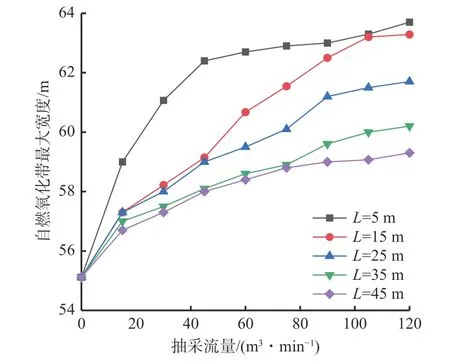
圖9 不同內錯距條件下自燃氧化帶最大寬度與抽采流量的關系Fig. 9 Relationship between the maximum width of spontaneous combustion oxidation zone and drainage amount under different dislocation distances
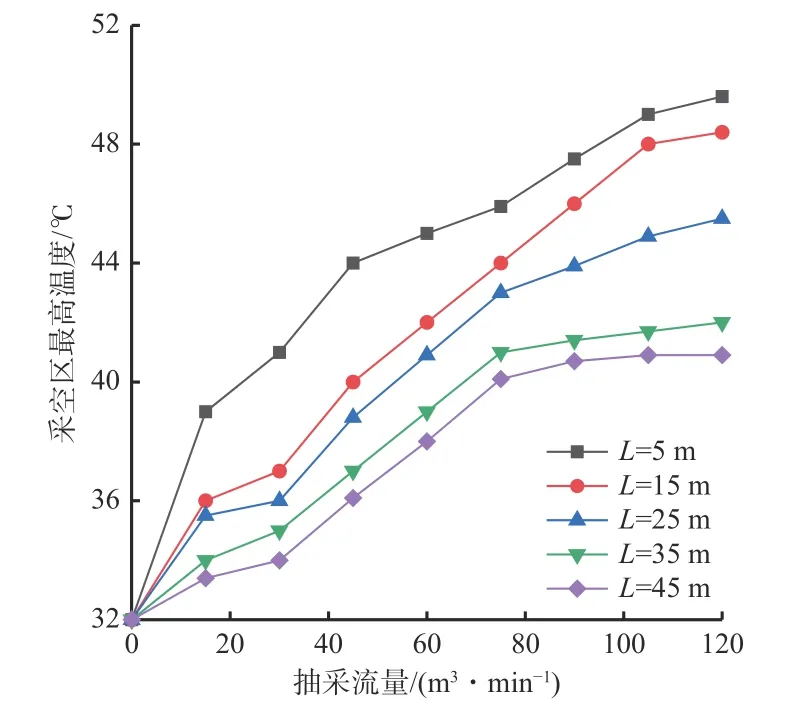
圖10 不同內錯距條件下采空區最高溫度與抽采流量的關系Fig. 10 Relationship between the maximum temperature and drainage amount under different dislocation distances
4 結論
1) 基于賈家溝煤礦10106 工作面實際建立了采空區三維流?固?熱多場耦合數值模型,分析了低位巷抽采瓦斯誘導采空區遺煤自燃規律。低位巷瓦斯抽采會使采空區漏風量增大,煤自燃危險性增加。
2) 低位巷瓦斯抽采流量增加可有效降低上隅角瓦斯濃度,但自燃氧化帶最大寬度和采空區最高溫度增加,過高的抽采壓力還會導致上隅角附近空氣“回流”至采空區,增加采空區遺煤自燃風險。
3) 當低位巷瓦斯抽采流量一定時,內錯距越小,則采空區自燃氧化帶最大寬度和最高溫度越大。結合數值模擬結果與其他工程實踐,賈家溝煤礦低位巷內錯距選擇15 m,瓦斯抽采流量為45 m3/min,此時上隅角瓦斯體積分數為0.875%,采空區自燃氧化帶最大寬度為59.14 m。
