用于垂直面內電磁驅動的裝置設計與仿真
2016-01-28 03:34:11李來利
機械與電子 2015年7期
李來利,李 靜
(中國科學技術大學精密機械與精密儀器系,安徽 合肥 230027)
Design and Simulation of an Apparatus for Electromagnetic Actuating in the Vertical Plane
LI Laili,LI Jing
(Department of Precision Machinery and Precision Instrumentation,University of Science and Technology of China,
Hefei 230027,China)
用于垂直面內電磁驅動的裝置設計與仿真
李來利,李靜
(中國科學技術大學精密機械與精密儀器系,安徽 合肥 230027)
Design and Simulation of an Apparatus for Electromagnetic Actuating in the Vertical Plane
LI Laili,LI Jing
(Department of Precision Machinery and Precision Instrumentation,University of Science and Technology of China,
Hefei 230027,China)
摘要:采用SolidWorks和ANSYS相結合的方法,設計了一個四極子電磁驅動裝置,以實現在垂直平面內對磁球位移的2-D線性控制。在Zhang等人提出的磁力模型基礎上,通過ANSYS的仿真計算,對驅動電流與磁球受力平衡位置的關系進行了修正,并驗證了該裝置能夠用于垂直面內二維位移的線性控制。
關鍵詞:電磁驅動;SolidWorks;ANSYS
中圖分類號:TM153
文獻標識碼:A
文章編號:1001-2257(2015)07-0011-04
收稿日期:2015-03-17
基金項目:973重大科學研究計劃項目(2012CB9375000)
作者簡介:李來利(1990-),女,安徽亳州人,碩士研究生,研究方向為光電檢測技術與儀器;李靜(1968-),女,安徽合肥人,副教授,研究方向為光電測試技術與儀器。

Abstract:By combining SolidWorks with ANSYS,a quadrupole electromagnetic actuator is designed to apply 2-D linear displacement control to magnetic beads in a vertical plane. Based on the magnetic force model developed by Zhang et al. and using ANSYS simulation, the functional relationship between the effective drive current and the force balanced position of magnetic bead is corrected. Furthermore,the ability of the apparatus to apply linear displacement control in the vertical plane is verified.
Key words:electromagnetic actuation;SolidWorks;ANSYS
0引言
在生物顯微操縱技術中,磁鑷是通過外加梯度磁場對連接生物樣品的導磁性微粒操縱,該過程無機械接觸、無熱損傷[1]。此外,由于典型的生物材料對磁場不敏感[2],所以磁鑷僅作用于導磁性微粒,不會發生不必要的捕獲。因此,磁鑷在生物學領域中具有很高的應用價值。近年來,有關磁鑷的研究集中在電磁驅動裝置,即采用電磁鐵和磁極來產生可控的梯度磁場,對處于場中的超導磁性微粒進行操控[3-6]。
在生物學大分子拉伸實驗中,通常大分子的一端與蓋玻片表面連接,另一端與磁球連接,需要在垂直平面內對磁球施加磁力,控制其軸向位移[7]。為了滿足實驗需要,設計了一個四極子電磁驅動裝置,用于在垂直平面內對目標磁球實施2D方向上的操控。該裝置同時集成了縱向磁鑷和橫向磁鑷的功能,且易于樣品池的擺放,能與高數值孔徑的物鏡和聚光器配合使用。
1裝置的結構設計
采用SolidWorks設計的裝置結構如圖1a所示,由4個磁極、4個線圈、1個方形磁軛以及樣品池組成。磁軛帶有4個凸起,用于纏繞線圈,它將所有線圈和磁極連接成回路,用于形成完整磁路、增強磁場。每個驅動線圈對應1個磁極,4個磁極分上下2層分布,其俯視圖如圖1b所示,深灰色為頂層磁極,淺灰色為底層磁極。為了便于磁軛的連接,底層磁極加了2個墊片,其厚度控制上下層磁極間距離。俯視圖中磁極P1與P4極尖重合,P2與P3極尖重合,4個磁極的極尖在XZ平面內圍成了工作區域。樣品池由2片蓋玻片形成,插置于2層磁極之間。
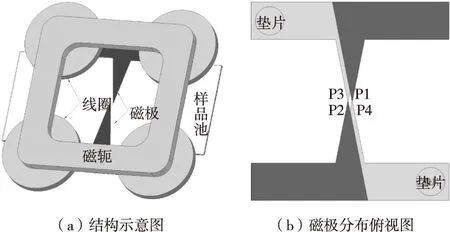
圖1 裝置結構設計
磁極選用高導磁鎳鐵合金,其相對磁導率為36 000,厚度為100 μm。4個磁極設計成尖形,且尖端是一半徑50 μm的圓角,用于增加磁場梯度、優化磁力。磁軛由冷軋鋼加工而成,其相對磁導率為5 000,厚度為2 mm。線圈由直徑0.5 mm的磁導線繞制而成,每個線圈的匝數是25。4個極尖所圍成的工作區域是邊長600 μm的正方形。樣品池可用空間高度為240 μm,滿足實驗操作要求。整體裝置成扁形,厚度小于5 mm,因此能放置于高數值孔徑的顯微物鏡和聚光器之間。
當電流施加到線圈時,產生的磁通量將沿著磁極傳輸到極尖,然后從極尖擴散到空氣,在工作區域內產生一高梯度場作用于磁性微粒。由于每個磁極僅能產生指向極尖的引力,通過采用4個磁極,可以在XZ平面內產生2D方向的磁力。
2力學模型
為便于建模,定義了磁驅動坐標系{O;x′,z′},如圖2所示。4個極尖所圍成的虛線方形區域為工作區域,其中心為坐標原點,極尖所在位置是[±e00]和[00±e]e=424 μm。測量坐標系{e;x,z}繞Y軸逆時針旋轉45°即可得到驅動坐標系,兩者關系如下:
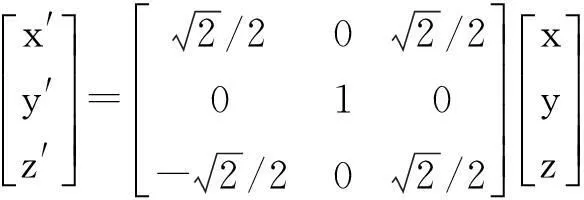
(1)
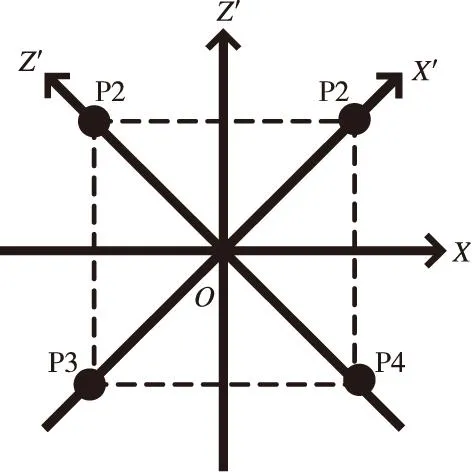
圖2 磁驅動坐標系和測量坐標系
磁驅動的原理是通過梯度分布的磁場對處于其中的可磁化微粒施加力的作用。超順磁性磁球置于磁場B中,它將被磁化形成磁偶極子,并與外部磁場相互作用。磁球所受的梯度磁力為:

(2)
m=(3V/μ0)((μr-1)/(μr+2))B為磁球有效磁化強度,V是磁球體積,μ0是真空磁導率,μr為磁球相對磁導率。顯然當磁球選定后,其所受的磁力大小和方向是由外部梯度磁場決定。
所設計的電磁裝置滿足2個條件:采用電磁鐵和尖形極子來產生磁場;設計中采用磁軛來形成封閉的磁路,可以采用Zhang Zhipeng等人提出的力學模型[5],即基于磁單極子近似和疊加原理的方法建模。模型中,每個磁極產生的磁場近似為1個點磁荷場,系統產生的總磁場通過疊加原理獲得。磁驅動坐標系下,四極子電磁驅動系統對工作區域內磁球施加的磁力為:

(3)



(4)
由式(1)和式(4)可推導出,測量坐標系下磁力平衡點位置,得到歸一化的位移與歸一化有效驅動電流的關系為:
(5)
式(5)表明,通過控制有效驅動電流,可以控制磁阱位置,進而移動磁鑷捕獲的磁球。
3ANSYS仿真結果與分析
將采用SolidWorks設計的三維結構導入ANSYS,賦單元和材料屬性并劃分網格,對系統電磁特性進行仿真計算。在ANSYS中,采用標量法描述三維靜態磁場,采用有限元啞元SOURC36單元建立電流激勵模型。線圈設置為虛擬電流源,不需網格劃分。為了在工作區域內得到精確的解,采用了局部區域網格細分。然后施加邊界條件和虛擬線圈激勵,最后采用差分標勢法求解。
3.1 梯度力的產生和控制
單線圈激勵時,將10安匝的磁動勢施加到與P1極子相關聯的線圈,系統在XZ平面內產生的磁場分布如圖3所示。
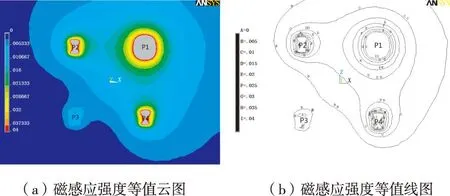
圖3 XZ平面內的磁場分布
由等值云圖3a可見,線圈施加電流后,磁極P1在接近極尖的工作區域內產生了高梯度場。此外,從磁感應強度等值線圖3b可見,在XZ平面內磁極P1所產生的磁場等值線是以極尖為中心的近似環形分布,類似于點電荷的電場,可以近似為磁單極子,這與其他文獻的報道一致[5]。由于極尖并非理想的磁單極子,因此在接近極尖的小范圍內,磁場存在各向同性失真現象(參見圖3a中P2、P3、P4附近的等值云圖)。

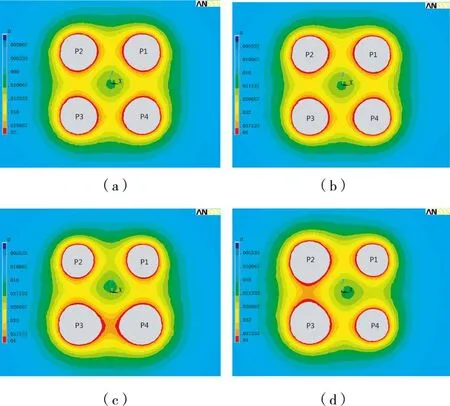
圖4 通入不同線圈電流組合時,XZ平面內磁場分布云
3.2 模型的修正
由式(5)得知,在原點附近區域,平衡點位置與歸一化有效驅動電流成線性關系,下面將根據ANSYS仿真計算驗證該關系是否準確描述設計的裝置。當線圈電流為圖4中b、c、d 3種組合時,沿軸向的磁感應強度分布如圖5所示。圖中磁感應強度曲線的最低點斜率為零,即為磁力平衡點。對比沿x軸和z軸的分布可見:b的平衡點位于原點,c向z正軸偏移55 μm,d向x正軸偏移55 μm。
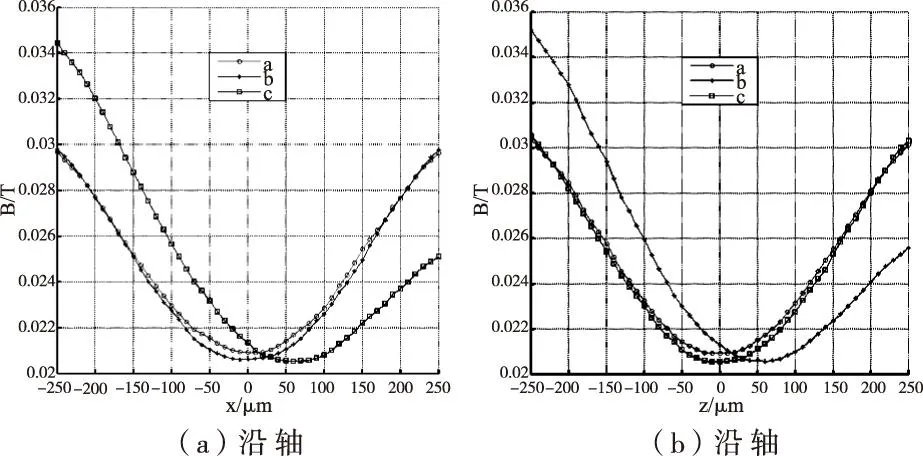
圖5 磁感應強度沿軸線的分布
表1幾種電流組合下,平衡點沿z軸的歸一化位移
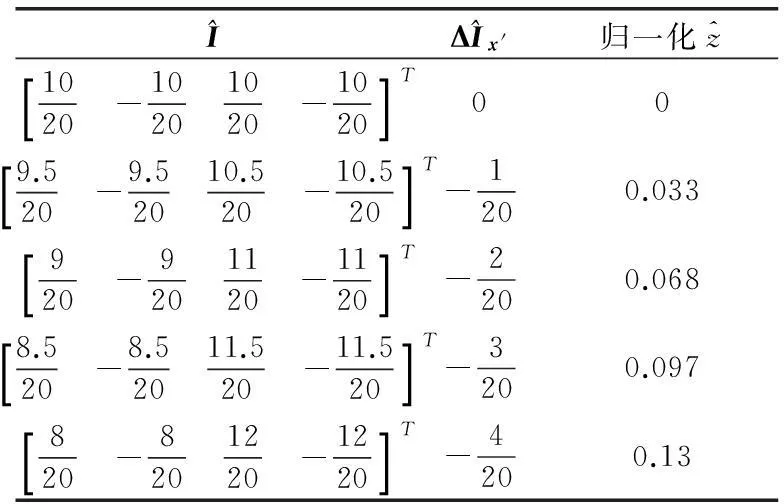
^IΔ^Ix'歸一化^z1020-10201020-1020[]T009.520-9.52010.520-10.520[]T-1200.033920-9201120-1120[]T-2200.0688.520-8.52011.520-11.520[]T-3200.097820-8201220-1220[]T-4200.13
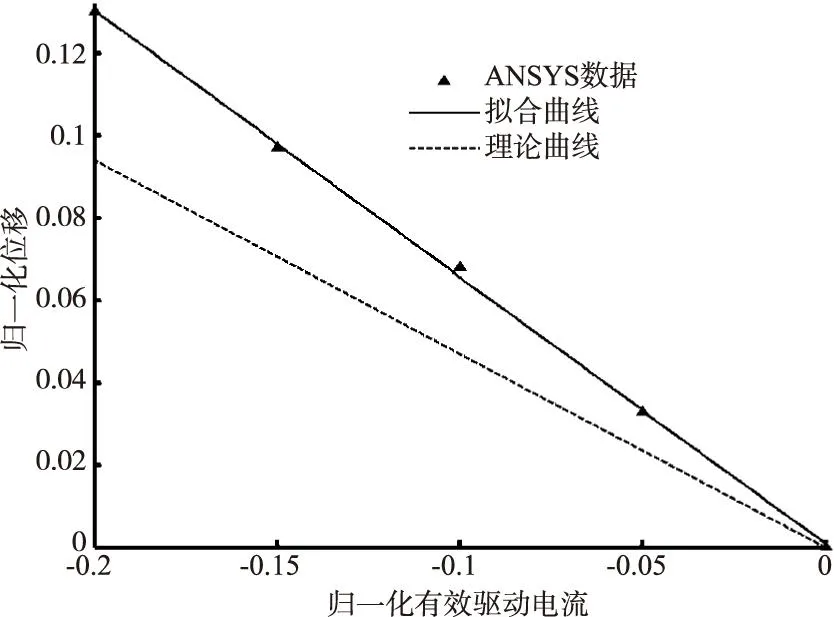
圖6 理論曲線和ANSYS仿真擬合的曲線
4結束語
采用SolidWorks和ANSYS相結合的方法設計了一個四極子電磁驅動裝置,在垂直面內實現了對磁球的捕獲和2D位移線性控制。在已有力學模型基礎上,采用ANSYS仿真修正了理論計算,以準確描述設計的裝置。仿真結果表明,通過控制施加的電流矢量,該裝置能夠在XZ平面內產生2D方向的磁力,在工作中心附近區域內線性地移動磁阱平衡點,將磁球穩定到所期望的位置。設計及仿真結果為電磁驅動裝置用于理論和實驗的研究提供了參考。
參考文獻:
[1]于洋.磁鑷技術的研究[D].安徽:中國科學技術大學,2010.
[2]GleichB,HellwigN,BridellH,etal.Designandevaluationofmagneticfieldsfornanoparticledrugtargetingincancer[J].IEEETransactionsonNanotechnology,2007,6(2):164-170.
[3]KollmannsbergerP,FabryB.High-forcemagnetictweezerswithforcefeedbackforbiologicalapplications[J].ReviewofScientificInstruments,2007,78(11):114301-114306.
[4]BijamovA,ShubitidzeF,OliverPM,etal.Quantitativemodelingofforcesinelectromagnetictweezers[J].JournalofAppliedPhysics,2010,108(10):104701-104709.
[5]ZhangZ,HuangK,MenqC-H.Design,implementation,andforcemodelingofquadrupolemagnetictweezers[J].IEEE/ASMETransactionsMechatronics,2010,15(5):704-713.
[6]ZhangZ,HuangY,MenqC-H.Activelycontrolledmanipulationofamagneticmicrobeadusingquadrupolemagnetictweezers[J].IEEETransactionsonRobotics,2010,26(3):531-541.
[7]王曉玲,張興華,魏孔吉,等.一種改進型單分子操縱裝置及其應用[J].物理學報,2008,57(6):3905-3911.
