采用平面二次包絡環面蝸桿的風洞模型支撐機構設計
2016-01-28 03:34:13甘小明,陳萬華,虞擇斌等
機械與電子 2015年7期
采用平面二次包絡環面蝸桿的風洞模型支撐機構設計
甘小明,陳萬華,虞擇斌,韓洪偉
(中國空氣動力研究與發展中心,四川 綿陽 621000)
Design of Sting Model Support in Wind Tunnel Using Planar Double Enveloping Worm
GAN Xiaoming,CHEN Wanhua,YU Zebin,HAN Hongwei
(China Aerodynamic Research and Development Center,Mianyang 621000,China)
摘要:風洞是研究航空航天飛行器的基礎性關鍵性地面設備,模型支撐系統是風洞的關鍵部件,其運動精度和動態特性直接影響風洞試驗精度。采用平面二次包絡環面蝸桿作為模型支撐系統的傳動部件,對模型支撐系統進行有限元分析和優化設計,并將計算結果運用在設計中。模型支撐系統實際運行結果表明,各項設計指標滿足使用要求。
關鍵詞:二次包絡;風洞;模型支撐機構
中圖分類號:TH132
文獻標識碼:A
文章編號:1001-2257(2015)07-0028-03
收稿日期:2015-01-15
作者簡介:甘小明(1971-),男,四川鄰水人,副研究員,碩士,主要從事航空航天地面模擬設備設計。

Abstract:Wind tunnels are the basic and key facilities in developing aircraft for aviation and spaceflight. Model support mechanism are the key part in wind tunnels, because the motion precision and dynamic characteristics directly affect the precision of the wind tunnel test. The transmission of the sting model support uses a planar double enveloping worm. Finite element analysis and optimizing is conducted on the sting model support. Tests running the sting model support show the design is successful.
Key words:double enveloping;wind tunnel; model support mechanism
0引言
風洞是研究航空航天飛行器氣動力氣動熱的基礎性、關鍵性地面設備[1]。風洞模型支撐系統是風洞的關鍵部件,要求其抗沖擊和承載能力強、穩定性好及傳動精度高。采用普通傳動機構難以滿足上述要求;平面二次包絡環面蝸桿副具有傳動精度高、承載能力強、效率高和壽命長的優點[2-5],是模型支撐系統理想的傳動機構。
1平面二次包絡環面蝸桿成型機理
平面二次包絡環面蝸桿副是經過二次包絡運動所形成的運動副,如圖1所示。第1次包絡是以特定齒面的蝸輪作為產形輪,與被加工的蝸桿齒面嚙合,圍繞假想的基圓錐以角速度ω0繞軸線回轉,同時被加工蝸桿繞自身軸線以角速度ω1回轉,以此進行包絡展成環面蝸桿的過程;第2次包絡是以包絡環面蝸桿為產形輪(蝸輪滾刀),按照相同的傳動比和中心距,包絡展成新的蝸輪齒面過程。包絡環面蝸桿與其展成的蝸輪構成的傳動副,稱為平面二次包絡環面蝸桿傳動副。
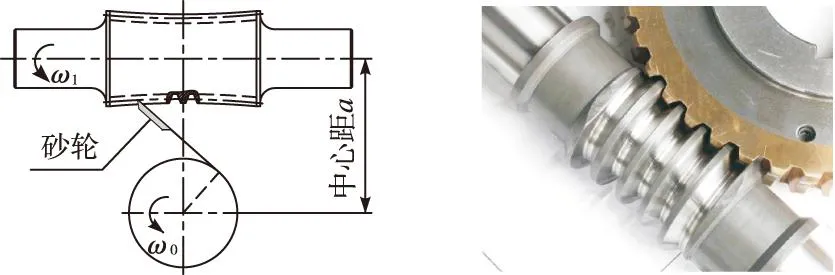
圖1 平面二次包絡環面蝸桿副
平面二次包絡蝸桿傳動與一般的蝸輪蝸桿傳動相比,具有以下優點:蝸輪蝸桿副同時接觸的齒數多,且為雙線接觸;蝸輪蝸桿副瞬時接觸線與相對滑動速度夾角大,接近70°~90°,易于形成潤滑油膜,潤滑條件好,齒面抗磨損能力強;瞬時接觸線法向誘導法曲率小,齒面接觸應力小,傳動的承載能力大,抗膠合能力強[6-9]。
2風洞模型支撐系統結構設計
2.1 模型支撐機構方案
模型支撐機構采用全彎刀結構形式,屬于尾支撐布局。彎刀機構是目前航空航天飛行器試驗應用最為廣泛的支撐形式,主要用于調整試驗用飛行器的攻角,常稱為迎角機構或α機構。應用彎刀機構進行試驗具有以下優點:
a.支撐機構位于模型下游,對模型表面的氣流流動影響較小,測量數據較其他支撐方式更為準確。
b.彎刀機構運動鏈簡單且為通用支撐機構,運行精度高,試驗能力強。
c.彎刀支板呈弧形,機構運行到攻角范圍內的任意角度對氣流的影響基本相同,試驗數據重復性好。
模型支撐機構主要由全彎刀支板、導軌座、滑塊座、伺服電機、圓弧導軌副及平面二次包絡環面蝸桿副組成,如圖2所示。滑塊座與彎刀支板通過螺栓和銷連接,圓弧導軌副分別安裝在滑塊座和導軌座上。整個模型支撐機構安裝在支架段駐室內上下平臺上。
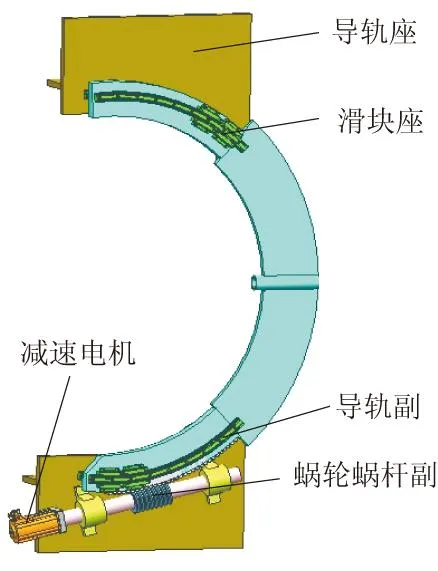
圖2 模型支撐機構組成
2.2 迎角機構運動原理
迎角機構運動鏈為:彎刀支板→蝸輪蝸桿→減速機→伺服電機。即伺服電機帶動減速機驅動平面二次包絡蝸輪蝸桿運動,蝸輪蝸桿帶動彎刀支板沿著圓弧導軌繞模型旋轉中心作圓弧運動,從而改變模型的攻角。采用該布局具有結構緊湊、傳動鏈簡單、承載能力強和運行精度高的優點。
3驅動機構選型計算
3.1 負載力矩計算
根據彎刀機構在0°攻角及上下極限位置的重心位置(坐標原點位于旋轉中心,如圖3所示),并按照下述公式,計算出最大驅動力矩,以確定蝸輪蝸桿輸入輸出力矩。
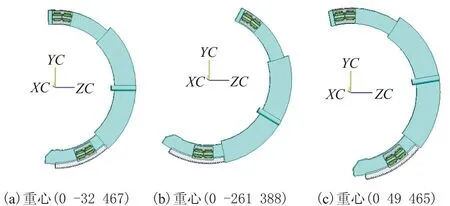
圖3彎刀支板在運動范圍內的重心位置
轉動慣量為:J=m·I2加速力矩為:Ta+J·a慣性力矩為:TG=G·z總力矩為:T0=Ta+TgI為轉動半徑;y,z為坐標值;J為轉動慣量;m為彎刀支板質量;Ta為加速力矩;a為加速度;Tg為慣性力矩;G為重力加速度;T0為總力矩。
蝸輪實際輸出力矩為T2w=Mz+T0,其中蝸桿輸出轉矩為T2≥T2w·KA·K1。
通過上式計算出蝸桿輸入轉矩為41.6 N·m,蝸桿材料選用40CrNi鍛,直徑為110 mm,蝸輪材料選用ZCuSn10Pb1,按照參考文獻[10]中相關公式,對蝸桿受力分析和強度計算,結果表明所設計的蝸桿副滿足強度要求。
3.2 平面二次包絡蝸輪蝸桿主要參數
根據模型支撐機構傳動的中心距、傳動比(由模型支撐機構的運行速度、電機轉速及減速機減速比確定),可以確定蝸輪齒數及蝸桿頭數。蝸輪蝸桿具體參數如表1所示。
表1蝸輪蝸桿傳動主要參數
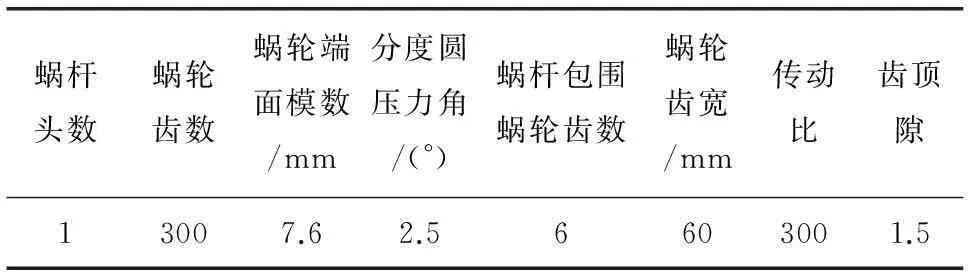
蝸桿頭數蝸輪齒數蝸輪端面模數/mm分度圓壓力角/(°)蝸桿包圍蝸輪齒數蝸輪齒寬/mm傳動比齒頂隙13007.62.56603001.5
4彎刀支板有限元計算
目前,有限元分析已成為解決工程實際問題的一種最有效的方法,通過有限元分析可以校核結構應力應變及探知結構的動態特性。因此,對模型支撐機構中的關鍵部件——全彎刀支板進行有限元分析,可計算其在氣動載荷及重力作用下的應力應變;對其模態分析,可計算出各階頻率及振型。通過對彎刀支板建立有限元模型,施加載荷和確定邊界條件,對其進行靜力和模態分析,計算結果如圖4~圖6及表2所示。
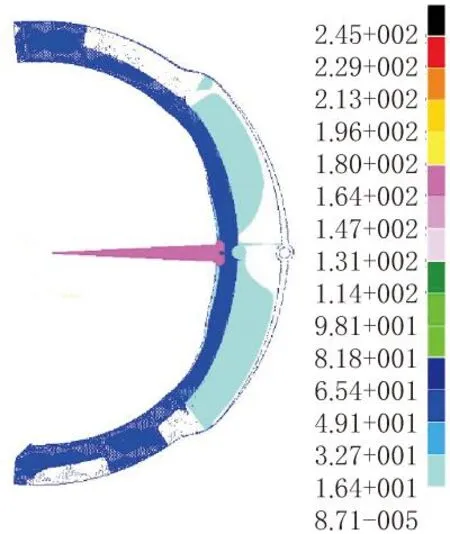
圖4 應力云圖
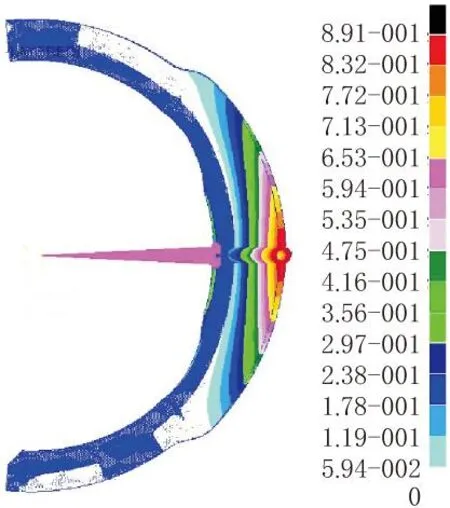
圖5 變形云圖
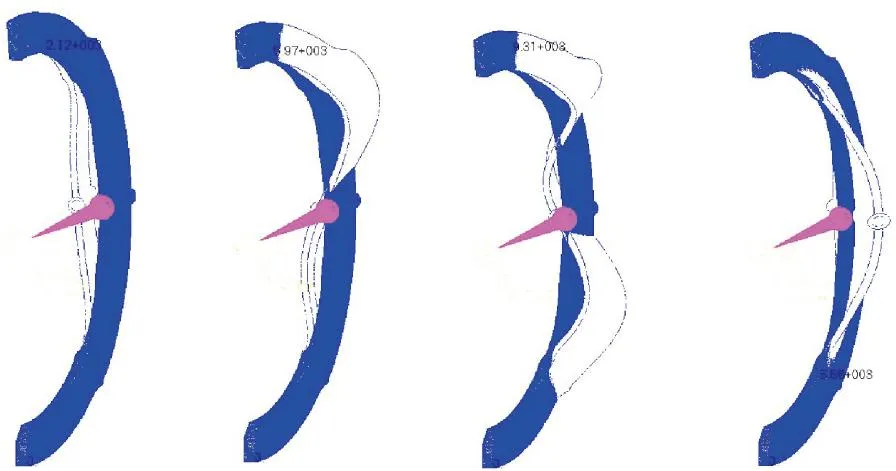
圖6 前4階振型云圖
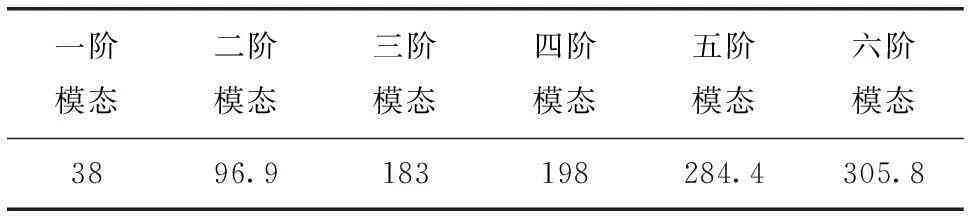
表2 前6階振型頻率 Hz
通過圖4~圖6及表2可知,彎刀支板的最大應力為245 MPa,位于彎刀支板前端與模型相連處,彎刀支板選用30CrMnSiA鍛材料,應力小于其許用應力;最大變形為0.89 mm,位于彎刀支板末端,變形量不影響模型支撐機構的運行精度。由前6階振型及振動頻率計算結果可知,彎刀支板振型以整體扭轉為主,頻率與風洞內的氣流激勵頻率相差超過20%,不會發生共振。
5結束語
在模型支撐機構設計中,采用承載能力強、運行精度高的平面二次包絡環面蝸桿副作為傳動機構,并對模型支撐系統中的彎刀支板進行有限元分析,得到了彎刀支板的應力應變及模態結果。模型支撐機構實際運行情況和型號試驗表明,模型支撐機構的各項技術指標完全滿足設計要求。
參考文獻:
[1]劉政崇.風洞結構設計[M].北京:中國宇航出版社,2005.
[2]劉一揚,楊現卿.平面二次包絡環面蝸桿傳動的研究現狀與發展趨勢[J].機械工程師,2007(7):85-87.
[3]孫昌佑,林菁,孫傳文.平面二包環面蝸輪的特征建模[J].上海師范大學學報:自然科學版,2006,35(5):48-49.
[4]黃安貽,夏江敬,張仲甫.平面二次包絡環面蝸桿傳動多目標優化設計[J].機械設計,2003,20(9):40-41,44.
[5]孫賢會, 謝永波, 梁宏山.平面二次包絡環面蝸桿傳動極限傳動比的確定[J].林業機械與木工設備,1999(3):11-13.
[6]張彥欽,張光輝,邱昕洋.平面二次包絡環面蝸桿傳動齒面接觸應力計算[J].四川大學學報:工程科學版,2011,43(5):247-251.
[7]吳志歡,姚立綱,陳志良.平面二次包絡環面蝸桿傳動參數化設計系統的開發[J].機械,2003,30(6):30-32.
[8]張彥欽.平面二次包絡環面蝸桿傳動強度分析及試驗[D].重慶:重慶大學,2010.
[9]韋康南.平面二次包絡環面蝸桿傳動設計與評價研究[D].福州:福州大學,2004.
[10]成大先.機械設計手冊[M].北京:化學工業出版社,1993.
