基于CAN通信的AMT離合器控制策略研究
2016-01-29 05:13:38馬濤李守成李小龍李占江
機械制造與自動化 2015年4期
馬濤,李守成,李小龍,李占江
(1. 南京理工大學,江蘇 南京 210094; 2. 南京越博汽車電子有限公司,江蘇 南京 210091)
基于CAN通信的AMT離合器控制策略研究
馬濤1,李守成1,李小龍1,李占江2
(1. 南京理工大學,江蘇 南京 210094; 2. 南京越博汽車電子有限公司,江蘇 南京 210091)
摘要:為滿足機械式自動變速器(AMT)對整車動力傳動系統協調控制的需要,分析了基于SAE-J1939標準的發動機控制報文,設計了AMT控制器(TCU)與發動機控制器(ECU)通過CAN總線進行協調控制的控制方法,根據換擋過程中的不同狀態建立了對應的發動機控制策略,并進行了整車試驗。試驗表明,該控制方法可滿足AMT系統換擋過程中對發動機進行協調控制的需求,與發動機協調配合的平順換擋。
關鍵詞:發動機;AMT離合器;CAN總線;控制策略
Research on AMT Clutch Control Strategy Based on CAN Communication
MA Tao, LI Shoucheng, LI Xiaolong, LI Zhangjiang
(1. Nanjing Universily of Science and Technology, Nanjing 210094, China;
2. Nanjing Read Bo Autometice Electrones Co, Ltd. Nanjing 210091, China)
Abstract:In order to meet the AMT’s needs for engine coordinated and control, an analysis of SAE J1939 CAN communication message is done and AMT and engine control system is designed based on CAN bus. According to the method , control strategies which are used to deal with different situations are built and tested. Experiment indicates that this control strategy can meet the needs for AMT system and make the shifting process smooth and rapid.
Keywords:engine; AMT clutch; CAN bus; control strategy
0引言
機械式自動變速器(AMT)具有結構簡單、成本低、傳動效率高的優點,可以利用現有手動變速器進行升級改造,適用于對成本敏感的微型乘用車和商用車 。
相比AT、CVT等變速器,發動機協調控制在AMT換擋過程中更加重要。目前TCU控制發動機的方法主要有兩種:1) 通過直接調節發動機節氣門或外部強制斷油來實現發動機扭矩協調控制的方法;2) 通過通信協議將控制命令發送至ECU完成轉速和扭矩控制。前者TCU不能充分利用發動機噴油量和點火提前角的修正功能,所以無法實現對發動機的快速精確控制。隨著發動機控制協議和功能的逐漸開放,換擋過程中基于CAN通信的發動機轉速、扭矩控制已成為趨勢[1]。在 AMT 系統中引入 CAN 總線技術,實現 TCU與車上其他電子控制單元的通信,可以更加高效的實現各系統間協調控制和數據共享、降低整個系統的成本[2]。文中提出了一種利用TCU和發動機ECU通過CAN通信進行協調控制的換擋控制策略,并進行了試驗驗證。
1發動機的CAN通信控制
AMT換擋前后需要對發動機進行實時的扭矩、轉速控制,以達到平順換擋與延長離合器壽命的目的。
非換擋時刻,發動機由ECU控制,當TCU判斷車輛行駛狀態滿足換擋要求時,通過CAN通信介入發動機控制。根據J1939通信協議,傳動系統對發動機的控制方式有轉速控制和扭矩控制兩種,同時TCU可接收ECU向總線發出的發動機扭矩、轉速、水溫等信息[3],來修正對發動機和離合器的控制。傳動系統對發動機的轉速、扭矩請求報文如表1所示。

表1 TSC1TE報文定義
TCU通過CAN協議中的TSC1TE報文來控制發動機扭矩、轉速,override control mode priority為控制模式優先級,定義如下:
00:最高優先級;
01:高優先級;
10:普通優先級;
11:低優先級。
當TCU需要介入發動機控制時,將優先級提高,使得總線上其他控制器在保證行車安全的情況下讓出控制權。
Override control mode為TCU請求的發動機控制模式,TCU根據需要可選擇:
00:禁用;
01:轉速控制——控制發動機轉速調節至目標轉速;
10:扭矩控制——控制發動機扭矩調節至目標扭矩;
11:轉速/扭矩限制控制——根據TCU請求限制發動機轉速或扭矩輸出。
當TCU的控制請求優先級為總線上最高時,發動機ECU開始響應TCU控制,TCU根據離合器控制策略,對離合器執行機構和發動機進行協調控制。根據控制模式的不同,ECU控制目標值為報文中的Requested speed/speed limit 或Requested torque/torque limit的數值。
2AMT與發動機的聯合控制策略
a) 分離離合器階段的聯合控制
為縮短換擋時間,離合器的分離速度應盡可能提高,同時也要注意發動機的聯合控制,防止加載在發動機曲軸上的負載突然卸下后發動機飛車。此階段使用發動機扭矩配合離合器分離控制來達到這一目的。
由于離合器傳遞扭矩和離合器位移存在非線性關系,在發動機降扭過程中,離合器的位移需要根據發動機的實際扭矩調整。文中采用的策略是,發動機降扭矩與離合器分離同時進行,當發動機到達目標扭矩的同時,離合器分離至滑摩點。
b) 改變擋位階段的聯合控制
由于AMT系統換擋時間很短,可認為換擋前后車速保持不變[4]。為減小換擋后的轉速差,TCU需利用離合器從分離到接合至滑摩點這一時間段進行發動機轉速控制。目前通過通信對發動機進行轉速控制的方法有兩種,1) TCU通過請求發動機扭矩間接達到控制發動機轉速的目的;2) 是TCU直接請求發動機轉速,由ECU自行實現轉速控制。現采用2)方式對發動機轉速進行控制。
由于變速器改變擋位有不同工況,故發動機轉速控制也應有相應的控制策略。在正常升擋情況下,以輸入軸轉速為目標轉速,減少離合器滑摩時間,提高換擋舒適性。KickDown降擋工況下,以輸入軸轉速為目標轉速,并根據油門開度進行修正。適當提高發動機轉速,以便合理利用離合器滑摩作用,盡快傳遞發動機扭矩,減少動力中斷時間。發動機轉速計算模塊如圖1。
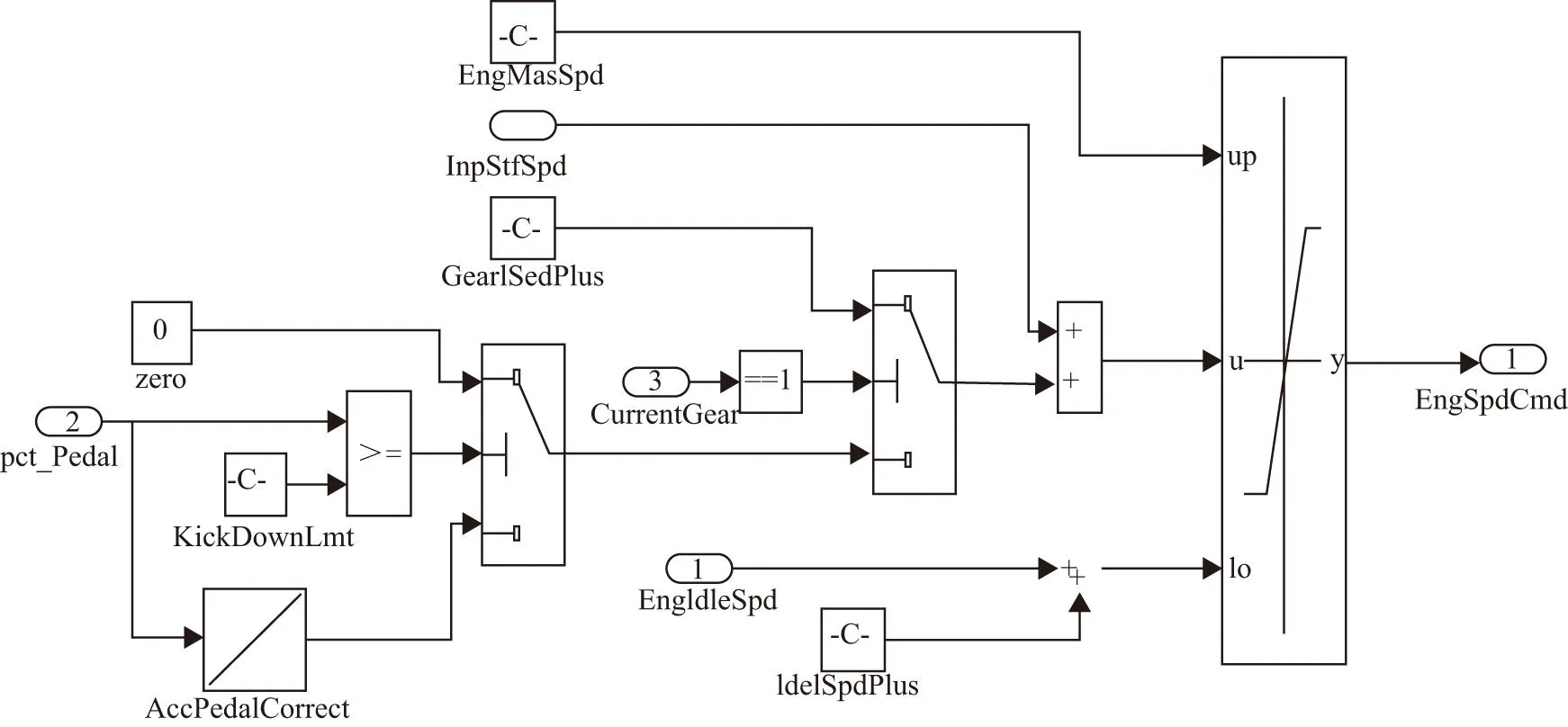
圖1 改變擋位階段發動機轉速控制模塊
c)離合器接合階段聯合控制策略
離合器接合階段的控制目標是,在保證沖擊度不大于規定限值的同時盡可能減少接合時間,使車輛具有良好的平順性和動力性。為此,轉速調節切換至扭矩調節后,發動機目標扭矩以通過CAN總線獲得的發動機實際扭矩為初始值進行扭矩控制。
在離合器接合階段,扭矩模式控制發動機。目標扭矩值以駕駛員請求扭矩和發動機時間扭矩為參考,同時根據油門踏板開度進行扭矩增量的修正。發動機扭矩增量計算模塊如圖2。
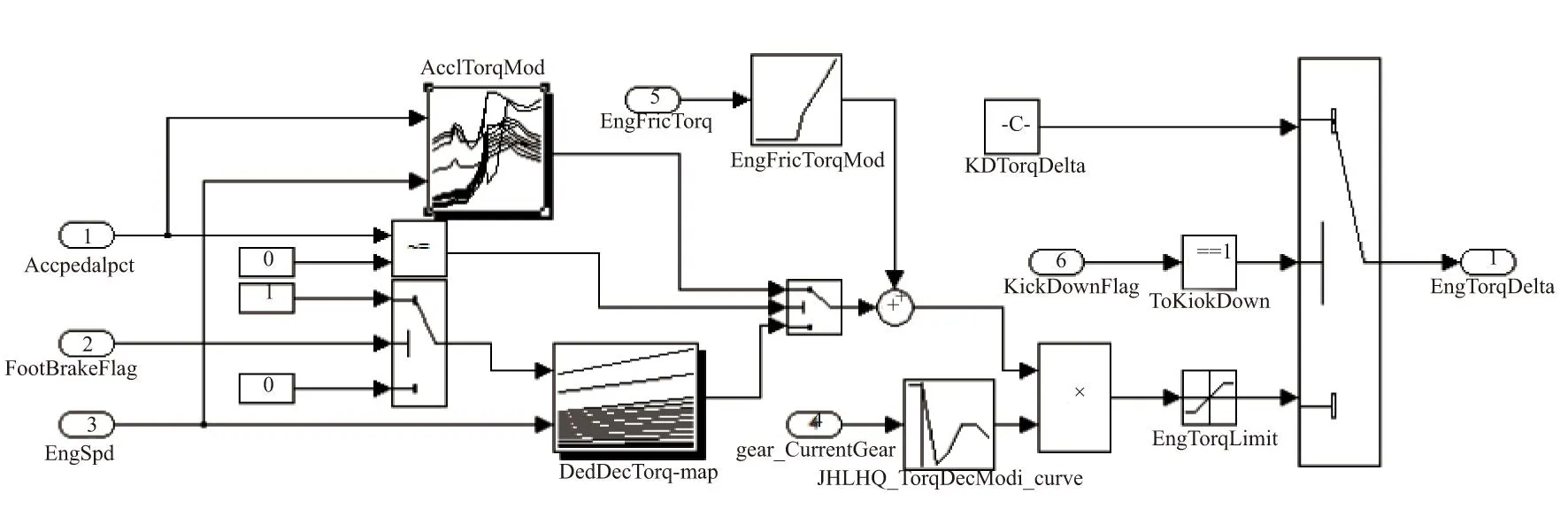
圖2 接合階段發動機扭矩增量控制模塊
3試驗結果
基于某自主品牌手動擋車型開發了AMT樣車,該樣車基本參數如表2。

表2 試驗樣車基本參數
采用文中的執行機構和控制策略,完成了TCU控制軟件開發和初步標定。圖3、圖4分別是40%和100%油門踏板開度下發動機協調控制試驗結果。

圖3 40%油門開度時二擋升三檔時發動機響應曲線
TCU根據車輛行駛信息判斷需要換擋時,首先進行發動機扭矩控制,圖中在發動機控制模式由0轉換為1時,系統進入該控制模式,TCU根據離合器分離的位置,計算出請求發動機扭矩并發送至CAN總線,發動機ECU接收到該扭矩命令后,調節使發動機實際輸出扭矩跟蹤TCU請求扭矩。
離合器分離完成后,AMT進入選換擋階段,圖中發動機控制模式由1轉換為2,此時發動機進入轉速控制模式,目標轉速為輸入軸轉速。發動機根據CAN線上TCU的轉速命令進行轉速控制。
當選換擋執行機構的動作結束并且發動機和輸入軸轉速差小于設定界限后,離合器開始接合。此時發動機控制模式由轉速模式轉為扭矩模式,并根據TCU的扭矩命令逐漸提升扭矩并協調離合器,完成離合器接合動作。
離合器完全接合后,整個換擋過程結束,TCU退出發動機控制模式,ECU根據車輛實際工況對發動機進行控制。
圖4 100%油門開度時三擋降二擋發動機響應曲線
當駕駛員深踩油門踏板時,說明其對車輛動力性有較高要求,為使車輛有更高的加速度,此時需要根據換擋MAP圖進行降擋,使發動機提高轉速工作在扭矩最大的區間內。 圖4中可看出,通過發動機在換擋期間的轉速控制,有效減少了離合器接合時的轉速差;在離合器分離和接合階段的扭矩控制,對保持發動機工作的穩定性具有良好效果。
4結語
目前,AMT系統的主要難點之一即為發動機和AMT系統的協調控制。通過對發動機—變速箱CAN通信的分析,設計了基于CAN通信的發動機控制方法,試驗表明,該方法可實現AMT和發動機的協調控制,并取得了良好效果。
參考文獻:
[1] 謝先平,梅近仁,李君,等. 基于發動機聯合控制的AMT換擋控制策略[J]. 汽車技術, 2012, 441(6): 28-31.
[2] 蔡威威, 劉文忠, 陳勇. 基于 MC9S12XEP100 的 DCT 控制器設計[J]. 拖拉機與農用運輸車, 2012, 39(001): 33-36.
[3] SAE . 71,(R) Vehicle Application Layer-J1939-71 (through 1999)[J]. 1999:66-69.
[4] 葉明, 秦大同, 劉振軍. 輕度混合動力 AMT 汽車動力性換擋規律研究[J]. 汽車工程, 2006, 7: 671-675.


收稿日期:2014-01-20
中圖分類號:TK44
文獻標志碼:A
文章編號:1671-5276(2015)04-0149-03
作者簡介:馬濤(1986-),男,山東臨沂人,碩士研究生,主要從事汽車電子控制單元方向的研究。
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
汽車與新動力(2015年1期)2015-02-27 12:11:01
電測與儀表(2014年17期)2014-04-04 11:56:50
汽車與新動力(2014年2期)2014-02-27 12:10:15
