模糊控制器設計及其優化研究
2016-03-06 05:31:18曾春華劉雪梅
中國設備工程 2016年18期
曾春華,劉雪梅
(同濟大學機械與能源工程學院,浙江 寧波 315021)
模糊控制器設計及其優化研究
曾春華,劉雪梅
(同濟大學機械與能源工程學院,浙江 寧波 315021)
模糊控制器中的量化因子和比例因子會改變模糊控制器的輸出特性,對模糊控制器的輸出性能有很大的影響。但是模糊控制器一旦設計完畢,模糊控制器的量化因子和比例因子就被固定,無法根據實際運行結果來進行參數的調整。本文在完成模糊控制算法設計的基礎上,采用PSO算法對運行過程中的模糊控制參數進行調整,并通過與傳統模糊控制器的對比,得出本文所研究的基于PSO算法的模糊控制器的收斂速度更快,可以獲得更好的控制效果。
模糊控制器;粒子群算法;參數調整
與建立在精確數學模型基礎上的現代控制理論系統相比,工業生產中的控制系統的被控對象更加復雜,而且不確定因素也更多。模糊控制器是一種非線性控制器,其模糊控制規則和隸屬度函數的確定困難,目前還沒有有效的模糊控制器設計和調整方法。本文擬采用粒子群算法對模糊控制器參數調節優化進行研究。
1 基于PSO的模糊控制算法設計
1.1 算法設計思路
針對模糊控制器設計完成之后,難根據實際情況調節控制的問題,本文主要采用粒子群算法與模糊控制器的結合,來實現模糊控制器中量化因子Ke、Kec和比例因子Ku三個參數的調節,以取得更好的控制修改。
粒子群優化算法(Particle Swarm Optimization,PSO)是Kennedy在鳥類捕食活動規律的啟發下所提出來的一種仿生物智慧概念算法。PSO算法將一組隨機解作為系統的初始解,通過不斷的迭代來獲得問題的最優解或較優解。與同樣采用迭代的遺傳算法相比,PSO算法不需要很多參數的調整,其算法及其實現更加簡單,是一個很好的多重最優解問題解決方法。
1.2 參數調整原則
模糊控制器中作為輸入變量的量化因子具有量化效應,而作為輸出的比例因子只有比例作用。模糊控制器中量化因子Ke、Kec和比例因子Ku的大小對模糊控制系統的動態性能有很大的影響,其影響具體表現在如下幾個方面。
(1)當Ke較大時,系統超調較大,導致控制系統的過渡過程較長。
(2)當Kec較大時,會減少系統的超調量,降低系統的響應速度。
(3)uK是模糊控制器的總增益,其選擇影響控制器的輸出,如果參數uK選擇過小,那么會增加系統的動態響應過程,而如果參數uK選擇過大,則有可能會導致系統振蕩,長時間無法收斂。
1.3 目標函數選擇
快速性、準確性和穩定性是衡量一個控制系統的三個指標,目前常用的模糊控制器性能指標只含有時間和誤差兩個變量,雖然這些指標的量獲取容易,但是誤差總是以絕對值的形式出現,無法表現出模糊控制器系統的正誤差和負誤差。
ITAE(Integral of Time-weighted Absolute value of the Error,時間加權絕對誤差值積分)性能判定準則可以讓控制系統具有快速響應特性,因此在本文的研究中,將選擇ITAE準則作為判斷模糊控制系統性能優劣的目標函數,同時根據模糊控制系統的特點,還應該在目標函數中加入系統超調量約束,最終確定的系統參數優化目標函數設計如公式(1)所示。

1.4 PSO參數調節算法
在本文中使用SIMULINK仿真軟件,對非線性動態系統進行仿真。為了優化設計,先構建動態系統,然后得到動態仿真結果。使用PSO算法實現的模糊控制優化流程如圖1所示。
如圖1所示,使用PSO粒子群算法,確定模糊控制器的各參數的值,以達到模糊控制器超調最小,提高模糊控制收斂的目的。
2 基于PSO的模糊控制器仿真
2.1 仿真結構設計
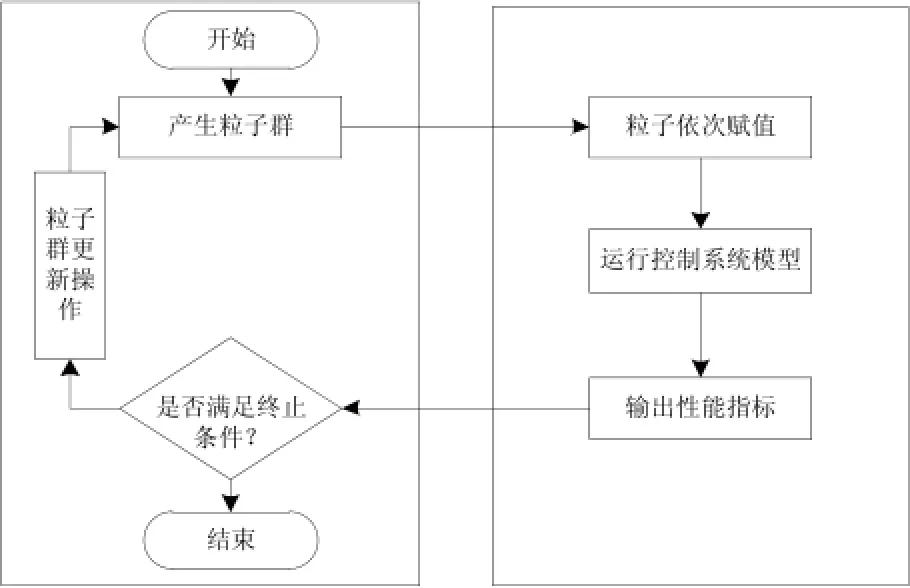
圖1 PSO參數優化流程圖
在對基于PSO的模糊控制器仿真過程中,首先確定控制器的Kp(比例)、Ki(積分)、Kd(微分)與誤差之間的模糊關系,并根據模糊控制規則對控制器的三個參數進行調整,提高控制對象的性能。通過對模糊控制器的分析,將誤差作為模糊控制器的輸入,將控制器的Kp、Ki、Kd三個參數作為輸出來設計如圖2所示的仿真圖。

圖2 模糊控制器仿真圖
確定模糊子集為:{NB, NM, NS, ZO, PS, PM, PB},各變量的模糊論域設計為:Kp∈[-0.3,0.3],Ki∈[-0.06,0.06],Kd∈[-3,3]。
2.2 仿真實驗分析
基于前面所研究設計的仿真結構和模糊規則,以如式(2)所示的二階傳遞函數的階躍響應來對本文基于PSO的模糊控制器和傳統模糊控制器進行對比,并對仿真結果進行分析。

設計采樣的時間為1ms,其中粒子群算法參數設定為:每個粒子維度設定為3,粒子種群數設定為100,最大迭代數設計為100,c1=c2=2.05。
兩種模糊控制器作用下的階躍響應曲線仿真結果如圖3所示。

圖3 兩種模糊控制器作用下的階躍響應曲線仿真結果
如圖3所示,基于PSO算法的模糊控制器的超調量更少,超調時間更短,表明基于PSO算法的模糊控制器的穩定性更好,被控制對象能夠更加快速的達到穩定狀態。
3 結語
模糊控制不需要建立精確的數學控制模型,可以很好的解決系統的時滯性和不確定性,模糊控制已經成為了智能控制的重要研究方向。在模糊控制器的設計過程中,其隸屬函數往往是通過經驗或專家知識獲得,一旦模糊控制器確定,其隸屬函數形狀也確定了,因此無法對隸屬函數是否適應狀態變量進行判斷。
本文基于PSO算法,對模糊控制器進行改進和優化,實驗仿真結果表明,本文所設計的基于PSO算法的模糊控制器的響應速度快,超調小,能夠更快的達到穩定狀態。
[1]陳婷婷,李鳳.基于粒子群優化訓練的模糊控制數學建模方法[J].科技通報,2016,08(31).
[2]陳曄,李生剛,劉恒.基于自適應模糊控制的分數階混沌系統同步[J].物理學報,2016,09(8).
[3]錢浩.淺談模糊控制[J].黑龍江科技信息,2015,03(25).
[4]陳摯.模糊控制理論的應用分析[J].科技風,2015,04(25).
[5]殷業.模糊控制的本質[J].前沿科學,2015,03(28).
TP273.4
A
1671-0711(2016)12(下)-0150-02
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17