晶閘管控制串聯(lián)電容器應用于彈性交流輸電系統(tǒng)的穩(wěn)定度分析
2016-03-07 02:03:48任磊李媛媛
電子產(chǎn)品世界
2016年1期
任磊 李媛媛
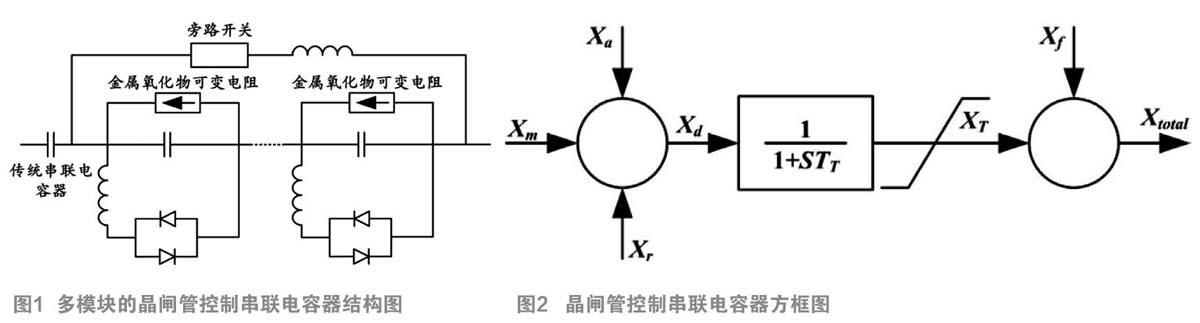


摘要:彈性交流輸電系統(tǒng)設備,如晶閘管控制串聯(lián)電容器(TCSC)、制動電阻、并聯(lián)電容電抗與靜態(tài)移相器被用來動態(tài)調(diào)整網(wǎng)絡配置,以提高系統(tǒng)的靜態(tài)特性和暫態(tài)穩(wěn)定度。現(xiàn)代電力系統(tǒng)龐大而復雜,擾動常改變電網(wǎng)結(jié)構(gòu)并導致非線性響應。本文采用晶閘管控制串聯(lián)電容器提高電力系統(tǒng)動態(tài)穩(wěn)定度,晶閘管控制串聯(lián)電容器的阻抗由輔助進相一遲相控制器根據(jù)發(fā)電機速度偏差進行調(diào)整,輔助控制器參數(shù)由基于模態(tài)控制理論的極點指定法來確定。針對指定的操作點設計控制器,探討系統(tǒng)在不同加載條件下,不同功率因數(shù),端電壓下的閉環(huán)特征值靈敏度。并對具有輔助進相一遲相控制器的晶閘管控制串聯(lián)電容進行檢測,以保證電力系統(tǒng)在各運行點的阻尼特性。數(shù)值模擬結(jié)果表明提出的控制能有效的提高大信號瞬態(tài)穩(wěn)定度和電力傳輸能力。
關鍵詞:彈性交流輸電系統(tǒng);晶閘管控制串聯(lián)電容器;模態(tài)控制理論;穩(wěn)定度
DOI:10.3969/j.issn.1005-5517.2016.1.015
傳統(tǒng)交流輸電網(wǎng)的電流潮流屬于自然分布狀態(tài),不易控制電流流向。在并聯(lián)的網(wǎng)路中,當某條線路輸送功率改變時,會導致同一并聯(lián)電路輸送電力的改變或?qū)е颅h(huán)流。若傳輸功率增加時、會造成動態(tài)穩(wěn)定度的惡化或電壓崩潰。彈性交流輸電系統(tǒng)是指在傳統(tǒng)交流輸電系統(tǒng)中,引入電力電子技術,提高電網(wǎng)的運行效率。通過引入可控大功率電子元件,使輸電網(wǎng)的阻抗、相角可控,使電網(wǎng)功率潮流分布可控,直接控制有功功率和無功功率的傳輸,提高系統(tǒng)應對緊急事故的靈活性,提高現(xiàn)有輸電設備的傳輸能力和系統(tǒng)穩(wěn)定度[1-3]。……
登錄APP查看全文
