車載LIDAR技術誤差分析與質量控制
2016-03-08 07:08:16張文君
西南科技大學學報 2016年4期
任 帥 張文君
(西南科技大學環境與資源學院 四川綿陽 621010)
車載LIDAR技術誤差分析與質量控制
任 帥 張文君
(西南科技大學環境與資源學院 四川綿陽 621010)
為了使車載LIDAR技術的測圖精度達到大比例尺基礎測繪的質量標準,重點研究了該系統的誤差成因及其對點云精度的影響,提出了一套完整的適用于大比例尺測圖的車載LIDAR系統的誤差控制方案。通過將1:500數字線劃圖成果與全站儀檢測數據進行對比,統計分析了車載LIDAR系統的測圖精度,驗證了該誤差控制方案的可行性,突破了新技術應用于帶狀大比例尺地形圖測繪的質量難題,縮短了外業工作時間、降低了成圖周期,為建立車載LIDAR技術“高效率、全天候、小外業、大內業”的測圖模式提供借鑒。
車載LIDAR系統 點云 精度 誤差來源
車載LIDAR(light detection and ranging,LIDAR)技術是通過整合動態差分GPS、高精度慣導系統、激光測距儀、成像系統等新型測繪技術于移動載體上,快速采集道路和周邊地物的點云與像片的測量系統。隨著GPS技術、慣性導航技術、激光測距技術及CCD技術的不斷發展,車載LIDAR技術已成為城市規劃、空間數據更新的一種重要手段。
由于在LIDAR系統中激光測距儀與IMU參考中心并不完全重合,POS與激光測距儀坐標系并不完全平行,使得系統存在偏心距誤差和安置角誤差,這些系統誤差對后期數據解算精度產生直接影響。本文以車載LIDAR系統快速生成城市大比例尺地形圖案例為基礎,研究了系統誤差的成因及對點云精度的影響,制定了相應的精度控制方案,并將得到的成果與傳統測繪成果進行對比分析,驗證了LIDAR誤差控制方案的可行性。
1 車載LIDAR的定位原理
當測量車保持一定速度勻速前進時,由激光測距系統與CCD相機獲取地物三維數據與紋理信息,GNSS與IMU測量并獲取系統的位置與姿態信息,并利用地面基站同步觀測數據校正車載數據,以確定系統的瞬時位置和運行軌跡,最終解算出各激光腳點高精度三維空間直角坐標值[1]。各坐標系向WGS-84坐標系轉換時所用的轉換矩陣為:
式中,①為轉換到WGS-84坐標系的點云三維直角坐標值;②為激光瞬時坐標系下的坐標向量;③為掃描儀激光發射參考中心與慣導中心的偏差值;④為慣導中心與天線相位中心的偏差值;⑤為天線相位中心;RW,RG為與當前位置相關的坐標轉換旋轉矩陣;RN為與實測姿態角相關的旋轉矩陣;RL為與掃描角有關的旋轉矩陣;RM為安裝誤差旋轉矩陣。車載LIDAR坐標轉換原理見圖1。

圖1 車載LIDAR坐標轉換原理圖Fig.1 Schematic diagram of vehicle LIDAR coordinate transformation
2 誤差構成及分析
根據上述定位原理可知,按誤差來源可將點云誤差分為以下幾個方面:測量誤差、系統集成誤差、內業處理誤差。
2.1 測量誤差
2.1.1 激光測距儀的測量誤差
(1)系統誤差分為由元器件本身的缺陷導致信號在元器件之間的傳輸過程中出現的傳播延遲和回波幅值波動引起的時刻鑒別誤差。
(2)隨機誤差分為計數量化誤差(掃描儀發射的脈沖信號及回波的到達時間和計數時鐘并不完全同步,使得信號飛行時間與計數器時鐘之間存在隨機的時間差)和晶體振蕩器振蕩誤差(在實際工作中,掃描儀中的晶體振蕩器受到溫度變化的影響而使基準頻率不穩定,從而直接影響計數器時鐘頻率的穩定性,最終降低測量的時間間隔的精度)。
2.1.2 GNSS定位誤差
(1)由GPS衛星設備引入的誤差。包括衛星鐘差(主要由瞬時的衛星鐘速、衛星鐘漂移率和隨機誤差導致的鐘差三部分組成)和衛星軌道誤差(包括因衛星與接收機在運行速度和地球引力位方面的差異導致的相對論效應、衛星質心與其天線相位中心的偏移)。
(2)由信號傳播路徑引入的誤差。包括對流層延遲(常用天頂方向的大氣干、濕分量和相應函數計算因對流層氣體濕度的差異導致的延遲誤差)、電離層延遲(若將晚上的電離層效應偏移視作常量,白天的偏移視作余弦函數,將其代入Klobuchar模型即可解算出電離層延遲誤差)、地球自轉效應(地球自轉引起的距離偏差可用測站坐標、衛星坐標和地球自轉角速度求出地球旋轉參數改正值)。
(3)由接受設備引入的誤差。包括多路徑效應(接收機受周邊地物反射信號的干擾而使其相位中心位置出現偏移)、天線的相位中心偏差(在實際工作中因接收信號強度和方位的變化而導致天線相位參考中心與其幾何中心不一致)、觀測誤差(主要指測量時的分辨誤差)。
2.1.3 IMU定姿定位誤差
由于慣導系統各測量單元存在各種系統偏移、隨機漂移和動態誤差,使得姿態測量的精度受到影響,進而直接降低點云數據的定位精度。
2.2 系統集成誤差
2.2.1 偏心距誤差
由于車載LIDAR系統中各儀器坐標系之間的中心不同,導致在安裝好后各坐標系之間存在平移誤差。包括在激光測距系統和慣導系統的坐標系下,兩者坐標原點之間的偏差值以及慣導系統坐標原點與GPS接收機天線相位中心之間的偏差值。
2.2.2 安置角誤差
由于車載LIDAR系統中各儀器坐標系之間并不完全平行,導致在安裝好后各坐標系之間存在角度誤差。其中,各坐標系下的俯仰安置誤差角、側滾安置誤差角和偏航安置誤差角是解算角度誤差的主要參數。
2.3 內業處理誤差
2.3.1 時間同步誤差
由于GPS采用的是GPS時,以原子時鐘確保時間間隔的穩定性,而慣導系統以晶振頻率作為計時基準,因而兩者的計時基準不統一。另外,GPS接收機的數據接收頻率一般為1 Hz,而慣導系統高達200 Hz以上的數據接收頻率可獲取更多定位信息。而且GPS接收機和慣導系統都會出現在數據采集與轉換等過程中產生時延的現象,進而導致兩者數據在卡爾曼濾波器中進行融合處理時融合時刻不同步。
2.3.2 內插誤差
由于POS的測量軌跡頻率為200 Hz,而掃描儀的輸出頻率為200 kHz,為了給每個掃描時刻匹配上對應的位置坐標和姿態信息,需要使用插值算法對POS軌跡數據進行處理,而內插引入的誤差稱為插值誤差。
2.3.3 坐標轉換誤差
為了將點云數據從原始的激光掃描瞬時坐標系轉換到WGS-84坐標系下,需要對數據進行多次坐標轉換。而各個三維坐標轉換模型在平差計算中受到泰勒級數展示式和旋轉參數初值選取的影響,導致解算結果精確性降低。另外,重力異常因素也會使參考橢球面的坐標成果存在垂線偏差,降低坐標轉換精度。
3 車載LIDAR系統誤差控制方案
為了減弱車載LIDAR系統各傳感器的測角誤差、測距誤差和系統集成誤差等,在分析車載LIDAR系統的定位原理和誤差源的基礎上,詳細設計了適用于大比例尺基礎測繪的誤差控制方案[1]。
3.1 測量系統校驗
在將各部件裝配在測量車前,需要對激光測距系統、慣導系統等傳感器進行精密的單機檢校,消除激光測距系統的測距、測角及與外界環境和反射物有關的影響,降低慣導系統隨測量時間的增長而積累的測量誤差。
(1)激光測距系統單機檢校:采用精度較高的靜態檢校法,將激光測距儀分別轉到0°,90°,180°,270°對室外唯一的明顯標志點進行360°轉動掃描,并各記錄一組轉臺讀數,然后求出點云中該標靶的相對移動掃描角度,最終擬合出該角度與轉臺旋轉角度之間的差值與激光測距儀的誤差參數。
(2)GPS測量誤差校正:在GPS測量誤差校正中,選擇高配置GPS接收機降低接收機的鐘誤差和測量噪音;采用求差法降低電離層和對流層的延遲誤差;而建立改正模型可降低衛星鐘的鐘誤差、衛星星歷誤差與相對論效應誤差。
(3)慣導系統檢校:為了克服傳統IMU“位置+速率標定法”中必須依賴高精度轉臺獲取北向基準且實驗步驟繁瑣的缺陷,結合參考文獻,本文采用一種無定向動靜結合標定法[2],僅需獲取水平基準和12次旋轉試驗,就能標定出慣導系統的陀螺標度因數、加速度計標度因數、常值偏置等全部誤差系數。
(4)里程計檢校:安裝在車輪軸上的里程計(DMI)是定姿定位系統的重要技術之一,其測量值可輔助GPS導航解算,提高定姿定位精度。在精度要求較高的大比例尺測圖中,一般采用固定路線長度檢校法[3]對DMI的尺度因子進行檢校。
(5)CCD相機檢校:一般而言,相機內外方位元素不準確和相機的鏡頭畸變是CCD相機在車載LIDAR系統工作時引入誤差的主要原因。采用基于四元數的光束條件平差法[4]對CCD相機進行檢校,通過有限次迭代計算,可精確計算相機的內外方位元素和鏡頭畸變參數。
3.2 消除坐標轉換誤差
由于POS系統測得的車載位置和姿態信息(外方位元素)和POS與傳感器之間的空間位置關系(內方位元素)直接影響激光腳點的坐標精度,因此,需要通過實驗和實踐的方式,確定車載LIDAR系統的內外方位元素,消除坐標轉換的誤差。
(1)內方位元素的室內標定:在內方位元素的標定中,激光測距儀坐標系和慣導系統坐標系的坐標原點之間的偏差、慣導系統中心與GPS天線相位中心之間的偏差可在實驗室內通過全站儀測距測角的方法直接標定。而各傳感器之間的安裝角誤差在室內測量難度較大,目前主要采用靜態檢校法,即掃描檢校場內大量固定的控制點,并利用已知的同名點坐標求解安裝角誤差。此方法在實際大比例尺快速測圖的情況下效率不高,本文通過兩次掃描豎直墻面,計算各掃描激光束產生的傾斜偏差值,對激光測距系統進行檢校[5]。
(2)外方位元素的動態標定:POS數據是解算移動載體位置和測量姿態的基礎數據,其定姿定位精度直接影響點云數據的精確度。采用上述基于豎直墻面的激光掃描動態檢校法可減少標定場的布設難度,提高標定的效率。
3.3 GPS差分結果與慣導IMU數據處理
為了提高車載POS數據的精度,可將解算后的GPS差分結果與慣導IMU數據進行緊藕合處理,再經過RTS平滑處理,得到高精度的移動載體位置坐標和姿態信息。
3.4 GPS信號失鎖路段用全站儀補測特征點
車載LIDAR系統測量的主要誤差源是DGPS定位誤差[6]。當GPS信號較好時,系統測量數據的高程精度可達2 cm,平面精度可達5 cm;但GPS信號失鎖后(比如測量車通過隧道、立交橋、天橋、高大建筑物和植被),定位精度顯著降低。根據卡爾曼濾波原理,可在信號失鎖路段用全站儀補測該區域的特征點,再利用航跡文件中的時間信息和姿態參數,反算出航跡控制點,提高航跡解算精度。特征點的選擇如圖2所示。
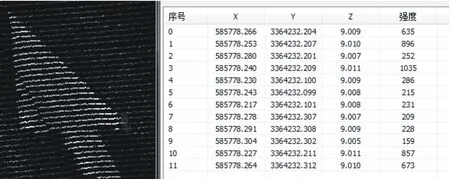
圖2 道路地標特征點的選擇Fig.2 Choice of characteristic points of road landmark
4 試驗分析
4.1 坐標系轉換
由于城市大比例尺測圖通常采用地方坐標系,因此需要利用四參數轉換模型和高程擬合模型,將原始的激光掃描瞬時坐標系轉換到最終的當地直角坐標系。
四參數轉換公式為:
高程擬合公式為:
z=Z+k0+k1X+k2Y+k3X2+K4Y2+K5XY
4.2 城市1:500地形圖測繪
首先,將車載LIDAR系統在標定場內進行外方位元素的標定,具體標定內容如誤差控制方案所示。然后按照相關測圖技術規范中有關1:500測圖的精度規定,對試驗區內道路兩側50m內全要素進行采集,包括建筑物、道路及附屬設施、管線設施、獨立地物、陡坎等。車載LIDAR系統獲取的各視圖模式下的點云數據見圖3。

圖3 部分路段的俯視圖與左側視圖Fig.3 The top and left views of some roads
4.3 成果對比
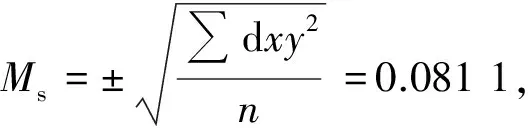

表1 抽樣點與檢測點的平面精度對比Table 1 Plane accuracy comparison of sample points and check points

表2 抽樣點與檢測點的高程精度對比Table 2 Sampling inspection in the contour error statistics
5 結論
本文以車載LIDAR技術的定位原理為出發點,分析了該技術用于大比例尺測繪的精度影響因素,并從各傳感器的誤差源出發,針對大比例尺測圖的特點和要求,設計了一套用于城市大比例尺測繪完整的誤差控制方案,并通過試驗對車載LIDAR系統獲取的1:500地形圖進行了精度分析,其中,平面中誤差=0.081 1,高程中誤差=0.025 2,測繪成果滿足1:500地形圖關于平面點位限差≤±0.25 m,高程點位限差≤±0.15 m的精度要求。本文的研究成果對建立車載LIDAR技術“高效率、全天候、小外業、大內業”的測圖模式具有重要借鑒意義,提高了大比例尺基礎測繪的工作效率,易于實現快速更新城市大比例尺地形圖的目的。
[1] 李德仁,袁修孝.誤差處理與可靠性理論[M].湖北武漢:武漢大學出版社,2012.
[2] 劉百奇,房建成.一種改進的IMU無定向動靜混合高精度標定方法[J].儀器儀表學報,2008,29:1250-1254.
[3] 李鑫. 車載移動測量系統誤差分析與檢校方法研究[D].河南鄭州:解放軍信息工程大學,2012.
[4] 郭波,屈孝志,黃先鋒,等.車載移動立體測量系統檢校及精度分析[J].激光與紅外,2011, 41(11):1205-1210.
[5] 田祥瑞, 徐立軍, 徐騰,等. 車載LIDAR掃描系統安置誤差角檢校[J]. 紅外與激光工程, 2014, 43(10):3292-3297.
[6] 劉寧. 車載LIDAR航跡解算精度提高方法研究[D]. 河南焦作:河南理工大學, 2011.
Error Analysis and Quality Control of Vehicle-borne Lidar Technology
REN Shuai, ZHANG Wenjun
(SchoolofEnvironmentandResources,SouthwestUniversityofScienceandTechnology,Mianyang621000,Sichuan,China)
In order to make the measurement precision of vehicle LIDAR technology to meet the quality requirements of large-scale basic surveying and mapping, this paper analyzed the causes of the systematic error and its impact on the point cloud precision, thus putting forward a complete set of error control solution for the vehicle LIDAR system applicable to large-scale surveying and mapping. By comparing the results of the 1:500 digital line graphic (DLG) operation and the test data of the electronic total station, the measurement precision of the vehicle LIDAR system was analyzed and the feasibility of the corresponding error control solution was verified. The new set of error control solution greatly helps the vehicle LIDAR technology to apply to the large-scale topographic surveying and mapping, therefore shortening the field working hours and reducing the mapping cycle.
Vehicle LIDAR; Point cloud handing; Precision verification; Source of error
2016-05-12
四川省教育廳重點項目(15ZA0120);四川礦產資源研究中心項目(SCKCZY2014-YB10)。
第一作者,任帥(1991—), 男,碩士研究生,E-mail:373225272@qq.com;通信作者,張文君(1970—),男,博士,教授,研究方向為遙感技術、地理信息系統,E-mail:113999066@qq.com
P21;TN959.3
A
1671-8755(2016)04-0057-06
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45