基于SCA100T-2傾角傳感器的風板控制系統設計實現
2016-03-17 06:01:51韓金玉天津中德職業技術學院電氣工程學院300350王守志天津中德職業技術學院航空與汽車學院300350
電子制作 2016年4期
韓金玉 天津中德職業技術學院電氣工程學院 300350王守志 天津中德職業技術學院航空與汽車學院 300350
?
基于SCA100T-2傾角傳感器的風板控制系統設計實現
韓金玉天津中德職業技術學院電氣工程學院300350
王守志天津中德職業技術學院航空與汽車學院300350
【文章摘要】
風板控制系統采用高精度雙軸傾角傳感器SCA100T-2實時檢測帆板偏轉角度,并由單片機STC12C5A60S2采集處理。數據經8位ADC0809進行A/D轉換后,為減少誤差采用數字平均濾波算法處理數據。系統通過自適應PID控制算法調節PWM信號,控制兩臺軸流風機的轉速,實現精確、平穩控制風板翻轉到設定角度。
【關鍵詞】
風板控制系統;傾角傳感器;數字濾波算法;自適應PID;PWM信號
0 引言
2015年全國大學生電子設計大賽試題I組題目是風板的控制系統設計與制作,要求對系統中的軸流風機的風速控制,使得風板翻轉角度(控制角度在45°~135°之間設定)在規定的時間內快速、穩定達到預定的要求。
1 系統設計方案與制作
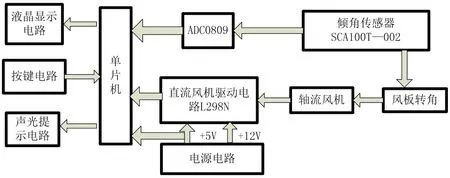
圖1 風板控制系統框圖
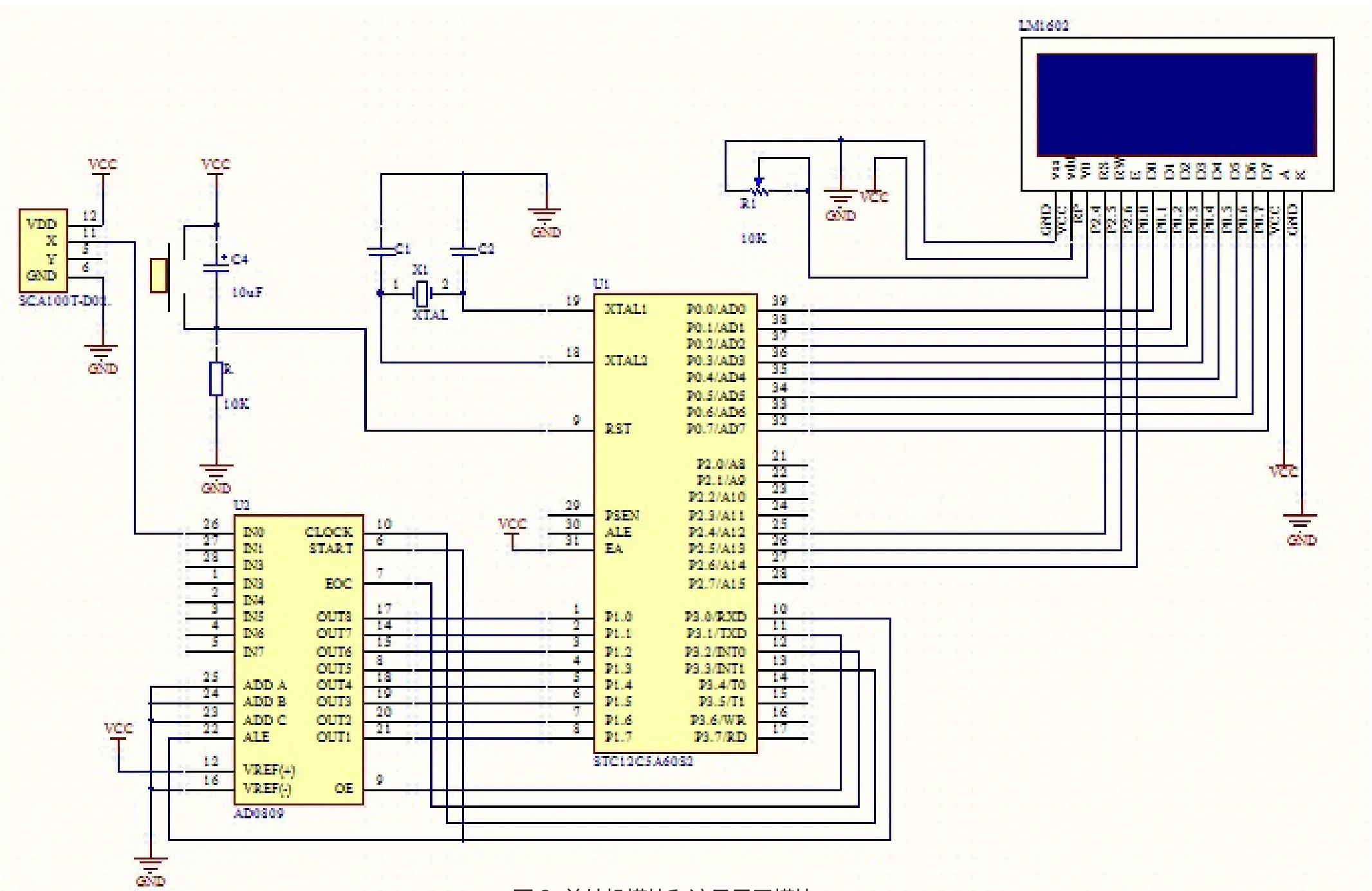
圖2 單片機模塊和液晶顯示模塊
根據系統方案設計,風板控制系統的框圖如圖1所示。系統主要由單片機模塊、角度檢測模塊、風機驅動模塊、A/D 模塊、LCD顯示模塊、聲光提示模塊、按鍵模塊等構成。通過按鍵設定風板的初始位置,由單片機調整PWM脈沖調寬信號,實現電機轉速控制,并由單片機把設定角度顯示在LCD液晶顯示屏上。安裝在風板上的角度傳感器將實時檢測到的信號送入ADC0809進行A/D轉換,然后信號經過單片機處理后得到角度值,并實時顯示到液晶屏上。同時根據風板旋轉的實時角度值,在軟件設計中利用自適應PID控制算法對PWM調速,使帆板迅速、穩定轉動到設定的角度,最終實現系統功能。
2 硬件模塊的組成
2.1單片機模塊
本系統采用的單片機是深圳宏晶科技公司的STC12C5A60S2單片機,電源電壓(5.5~3.3V),片內含60kb的可反復擦寫的只讀存儲器,8通道10位AD轉換器,速度可達25萬次/秒。其中,P1口作為普通I/ O口使用,也是片內8路AD轉換器的輸入端口,檢測帆板轉動角度值。本系統將單片機的P0端口和LCD1602與液晶顯示,顯示風板的設定角度值與實時角度。
2.2電機驅動模塊
軸流風機驅動采用LM298N芯片控制,該芯片是專用的電機驅動芯片。其內部含有H 橋的高電壓、大電流全橋驅動器,可以用來驅動直流電機和步進電機,采用標準邏輯電平控制,具有兩個使能控制端,在不受輸入信號影響下允許或禁止。器件有一個邏輯電源輸入端,使內部邏輯電路部分在低電壓下工作。芯片最大工作電流2.5A,額定功率25W。
2.3角度傳感器
角度傳感器有旋轉編碼器、雙軸傾角傳感器等系列,旋轉編碼器精度高、安裝工藝復雜、價格昂貴;SCAT100T系列的雙軸傾角傳感器,精度高,線性度好,價格便宜;所以選擇SCAT100T系列的雙軸傾角傳感器,根據測量角度的范圍選擇SCA100T-D02型號的傾角傳感器。
風板傾斜角變化范圍是45°~135°,而SCA100T-D02顯示的角度范圍是,因此在采集的角度基礎上增加90°,則SCA100T-D02測量角度范圍為0°~180°。由于風板的傾斜方向,決定了角度傳感器采用Y軸傾斜計算法來計算帆板的偏轉角度。所應用的角度轉化公式為:。安裝角度與風板垂直,安裝原理如下圖3所示。
3 系統設計算法
3.1數字濾波算法
在數據采集過程中,由于傳感器安裝在風板上,風板的低頻震動,包括傳感器在內的各個測量環節硬件電路存在電磁、濾波、噪音的干擾,影響采集數據的準確性;如果只單純采用改變硬件電路難以根本解決問題;但是結合軟件抗干擾的數字濾波算法可以使問題很容易得到解決,克服和彌補了硬件本身的缺陷和弱點。在實際編程過程中采用了數字濾波算法,由單片機的A/D端口對角度值分5組反復采樣25次,每一組去除最大值、最小值,剩余取平均值。將5組的平均值再除去最大值和最小值,再次求平均值,得到的便是穩定的角度值。
3.2自適應PID控制算法

圖3 角度傳感器Y軸的安裝原理圖
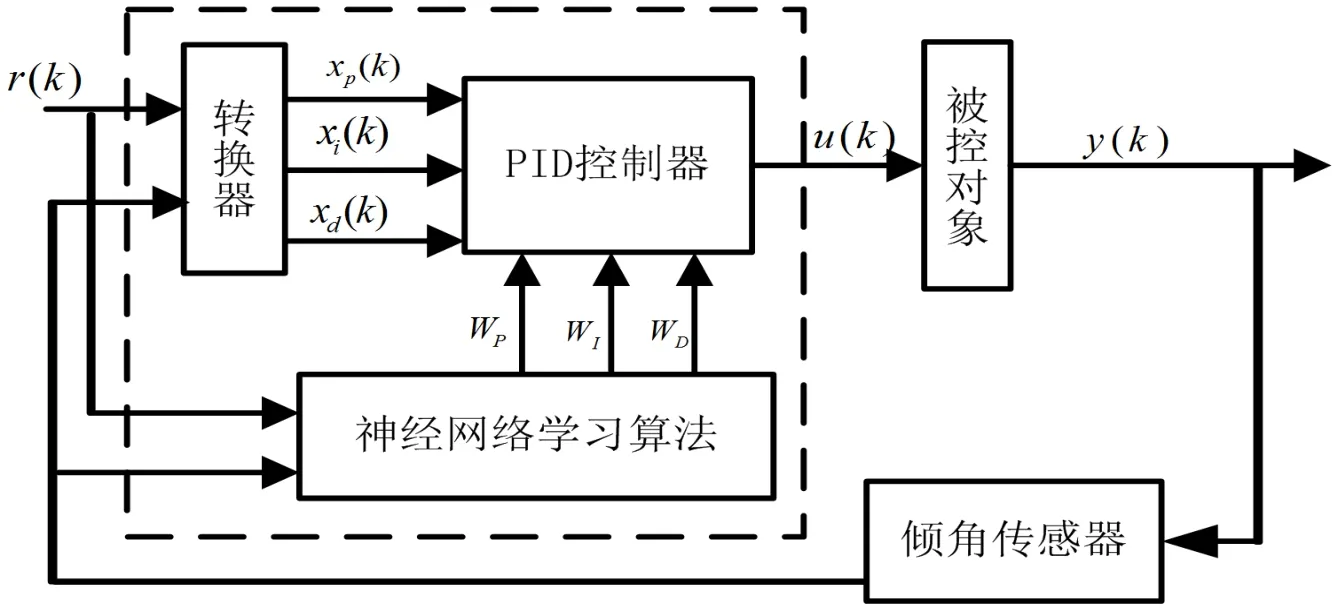
圖4 自適應PID控制器
由于在風板控制系統中的被控對象具有時變不確定性、純滯后等特征,控制過程機理較復雜,傳統的PID控制參數整定方法顯現出很大的局限性。因此本文采用自適應神經網絡PID控制算法,使風板迅速穩定達到預設的角度。整個的控制過程為首先預設角度給單片機,單片機對風板進行翻轉控制;其次單片機通過角度傳感器對風板實時角度進行監測,并將其信息傳輸至控制器;再次控制器根據預設角度和實時檢測角度進行判斷決策;最后控制器通過參數的自適應整定,得到控制信號,從而得出系統在誤差允許范圍內相應的PWM占空比,驅動風板轉過穩定的角度,自適應控制器的原理圖如圖4所示。
4 結論
本系統以STC89C52RC 單片機為核心控制部件,利用SCA100T-D02型號的傾角傳感器檢測風板角度的變化,事實證明此傳感器的線性度好,安裝方便,測量角度精確;系統算法采用自適應PID控制算法,系統運行平穩、準確,實現了對風板翻轉角度的控制。
【參考文獻】
[1]汪德彪等.MCS-51單片機原理及接口技術[M].北京:電子工業出版社,2009.
[2]智海素等.基于單片機控制的帆板系統的設計與測試[J].制造業自動化,2012,34(6):133-135.
[3]張存吉等.基于增量式PID算法的帆板控制系統的設計[J].微計算機信息,2012,28(7):67-69.
[4]馮愛偉,關勇.基于自適應PID控制算法的煤礦通風系統控制[J].煤礦機械,2015,36(3):265-267.
[5]趙建華,沈永良.一種自適應PID控制算法[J].自動化學報,2001,27(3):417-420.
[6]孫博.一種自適應PID控制算法研究[C].長春工業大學,2014:15.
韓金玉,1978.10,女,河北邢臺人,天津中德職業技術學院,講師,碩士研究生,主要從事電氣自動化技術研究與教學。
【作者簡介】
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
裝備制造技術(2019年12期)2019-12-25 03:06:46
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年12期)2018-08-01 00:48:04
家庭影院技術(2017年9期)2017-09-26 03:41:45