水平旋轉貼片頭的設計與運動學仿真
2016-03-18 01:04:23Designandresearchofhorizontalrotationmountinghead
制造業自動化 2016年1期
Design and research of horizontal rotation mounting head
付志斌,肖曙紅,林德育
FU Zhi-bin, XIAO Shu-hong, LIN De-yu
(廣東工業大學 機電工程學院,廣州 510006)
?
水平旋轉貼片頭的設計與運動學仿真
Design and research of horizontal rotation mounting head
付志斌,肖曙紅,林德育
FU Zhi-bin, XIAO Shu-hong, LIN De-yu
(廣東工業大學 機電工程學院,廣州 510006)
摘 要:貼片頭作為貼片機關鍵部件之一,是影響整個貼片機貼裝速度的關鍵。為提高貼片效率,提出并設計一款水平旋轉貼片頭,介紹了水平貼片頭的工作原理以及其具體的結構設計,并給出了相應的技術參數和設計要求,該貼片頭適用于模組機,多個水平旋轉貼片頭共同工作。同時利用ADAMS仿真軟件對水平旋轉貼片頭進行了運動學仿真,給出了貼片頭在特定工作狀態下吸嘴末端的位移、速度、角速度等特性曲線,為水平旋轉貼片頭的運動性能優化及控制策略提供一定的參考。
關鍵詞:水平旋轉貼片頭;貼片機;ADAMS;運動學仿真
0 引言
目前我國電子產品制造業正處于快速發展的態勢下,我國表面貼裝技術(surface mount technology,SMT)及其生產線也得到了飛速的發展。貼片機是SMT生產線中極為關鍵的設備之一,其市場需求量每年都在增長。目前我國市場上的貼片機基本上都是國外的品牌(富士、松下JUKI、環球、三星西門子、飛利浦等),我國自主研發的貼片機還處于研發調試階段。
SMT 貼片機實際上是一種精密的工業機器人,是“機-電-光”以及計算機控制技術的綜合體[1]。貼片機發展的速度對表面貼裝技術(surface mount technology,SMT)的發展有著直接的影響。貼片頭是貼片機的關鍵部件之一[5],其功能是先借助x-y坐標運動系統或送料器的運動到達需要貼片的位置,在通過Z向的直線運動以及θ角的轉動完成電子元件的吸取及貼裝。其中z向的直線運動是完成電子元件吸放時的上下運動,θ角的轉動則是完成電子元件的角度偏移的校正,如圖1所示。
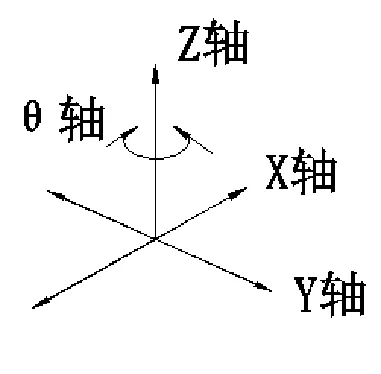
圖1 貼片頭各軸示意圖
目前世界上的電子裝備正在向密集化、小型化、輕薄化方向發展,這就要求電子元件也得小、輕和高效可靠,進而對貼片頭的性能提出了更高的要求。為提高貼裝速度,松下、索尼和富士等大型企業設計了一些可旋轉的貼片頭,可以吸放多種大小不同的元器件,目前該技術還只是這幾個大型的企業所掌控,國內的技術一般都是將多個貼裝頭組合在一塊,頭數越多,速度越快,但是隨著頭數的增加,復雜性增加,貼裝頭整體的慣量增大,影響X-Y軸的加速度與速度,對于整機的功率要求也相應增大[1],因此針對此問題設計了一款水平旋轉貼片頭。
1 水平旋轉貼片頭結構設計
從機器人的概念來說,貼片頭實際上是一只智能的機械手[2]。
1.1 水平旋轉貼片頭的設計要求
水平旋轉貼片頭由12個吸嘴組成,每個吸嘴均能夠獨立完成z軸的上下運動和θ的旋轉運動。
根據水平旋轉貼片頭的運動特點擬定其一個貼片頭一個工作循環大致分為以下三步:
吸取:即吸嘴末端在飛達正上方時,經0.3s完成吸取,行程為10mm,再經0.3s回到初始位置,旋轉貼片頭30°,在0.3s內完成角度旋轉,依次完成12個嘴的吸取。
移動:經XY軸移動到達貼裝位置。
貼裝:吸嘴經0.3s向下運動10mm,貼裝好后經再0.3向上移動10mm,然后貼片頭旋轉30°,依次完成其余的貼裝。
據此,水平旋轉貼片頭主要設計要求如表1所示。
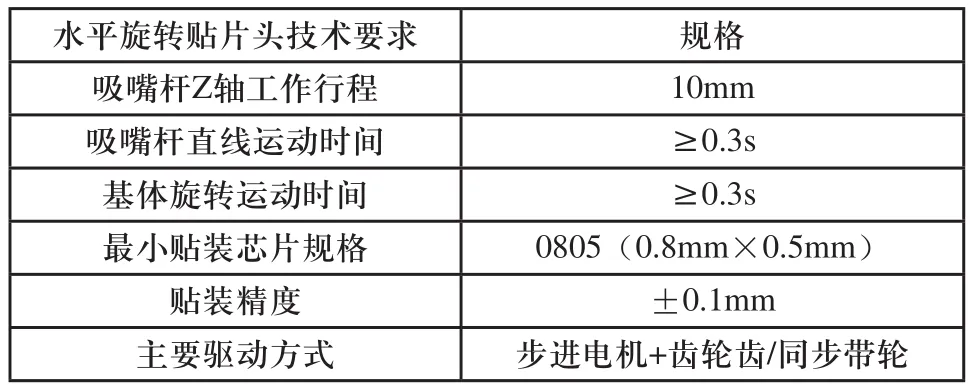
表1 水平旋轉貼片頭設計要求
針對上述設計要求設計出水平旋轉貼片頭整體結構如圖1所示。
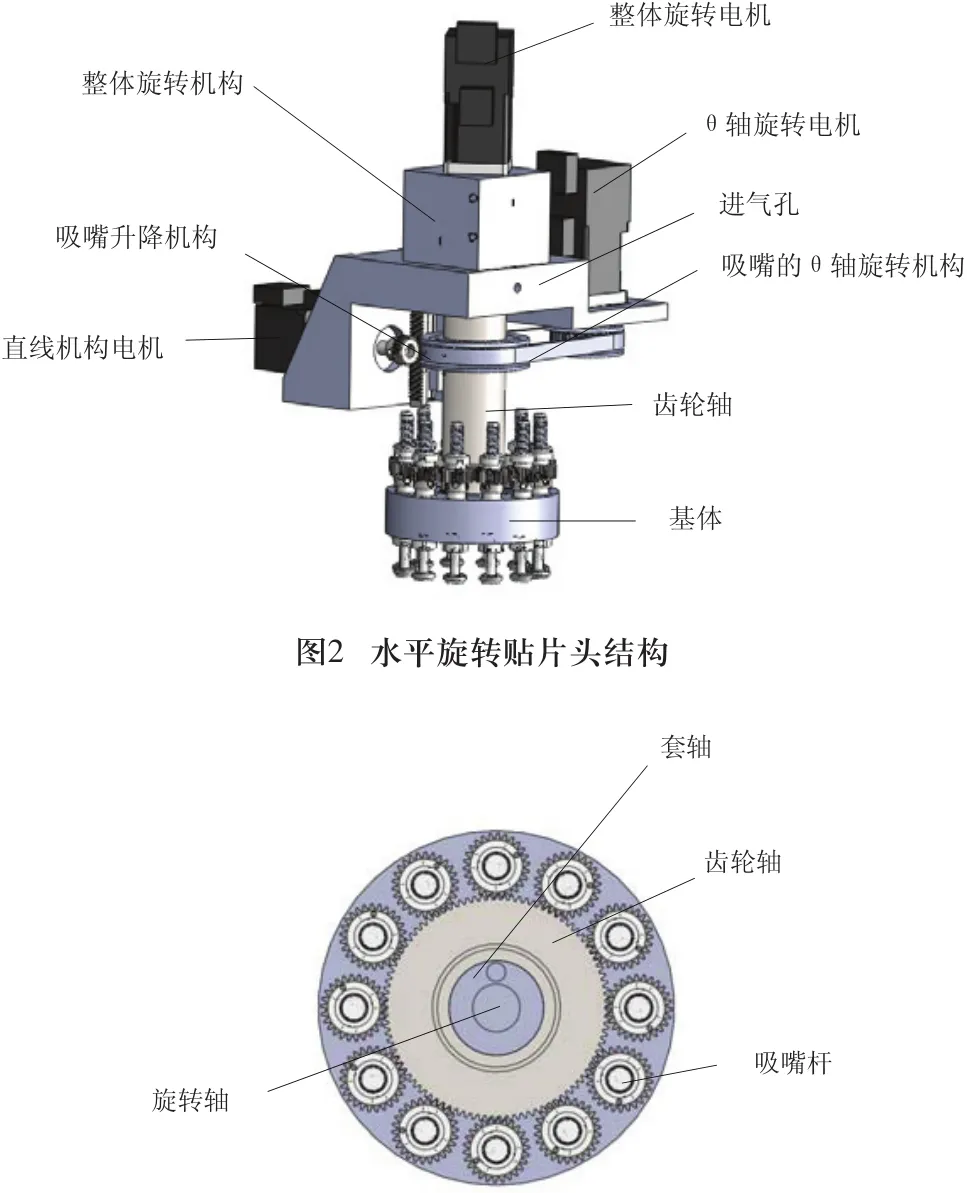
圖3 吸嘴θ軸驅動俯視
1.2 貼片頭設計特點
由于芯片的拾取是利用真空負壓來實現,所以將吸嘴軸設計成中空結構,并且由于吸嘴是要旋轉的所以將通氣孔設計在支撐座上,在齒輪軸內和旋轉軸之間設計一個帶有通氣孔的套軸,且套軸用銷釘卡在支撐座上,吸嘴與套軸上的通氣孔接通實現吸嘴真空和吹氣,這樣就能保證貼裝頭在旋轉時候氣管不隨著貼片頭旋轉而旋轉。
貼片頭的整體旋轉機構采用電機通過聯軸器連接貼裝軸驅動貼裝軸旋轉,吸嘴的θ軸旋轉機構由電機帶動同步帶輪,同步帶輪帶動齒輪軸,齒輪軸通過與安裝在吸嘴上的齒輪進行嚙合來驅動吸嘴θ軸向旋轉,吸嘴升降機構是由電機帶動齒輪齒條,由齒條驅動吸嘴完成吸嘴上下運動的。
本設計使得貼片頭整體結構緊湊,體積小,相對其他將貼片頭簡單組合在一起的結構,旋轉貼片頭整體的慣量減小。
2 水平旋轉貼片頭的運動學分析與仿真
貼片頭的運動學性能嚴重影響其運動精度與速度,對水平旋轉貼片頭做運動學分析是為了得到執行末端的位置與姿態情況,求解執行末端的位移、速度及加速度和時間之間的關系,從而為水平旋轉貼片頭動態仿真及驅動電機控制提供依據。
2.1 旋轉貼片頭的運動學分析
采用D-H(Denavit-Hartenberg)法建立旋轉貼片頭的連桿坐標系[8],由于旋轉貼片頭的工作時一次只有一個吸嘴桿在貼裝,對模型坐標系進行簡化后如圖4所示。對應的各桿參數表和關節變量列如表2所示。

圖4 旋轉貼片頭連桿坐標系

表2 旋轉貼片頭桿件參數和關節變量
依據連桿坐標系以及連桿參數,得出各連桿之間變換矩陣如下:
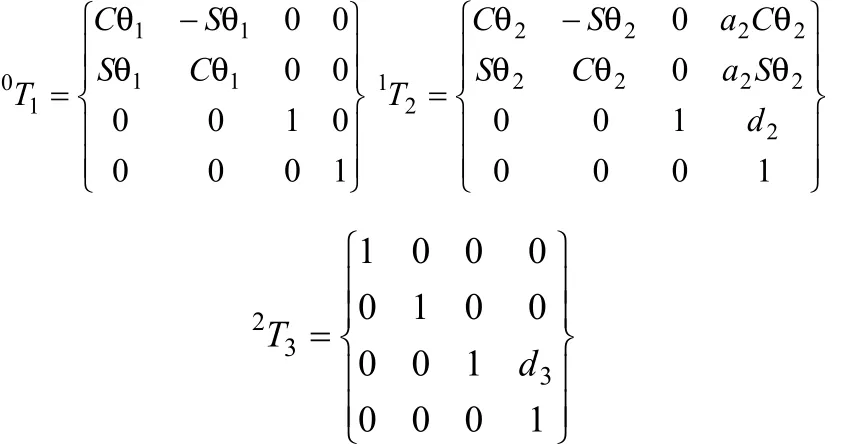
通過其次變換導出旋轉貼片頭執行器末端的運動學方程0T3,即:
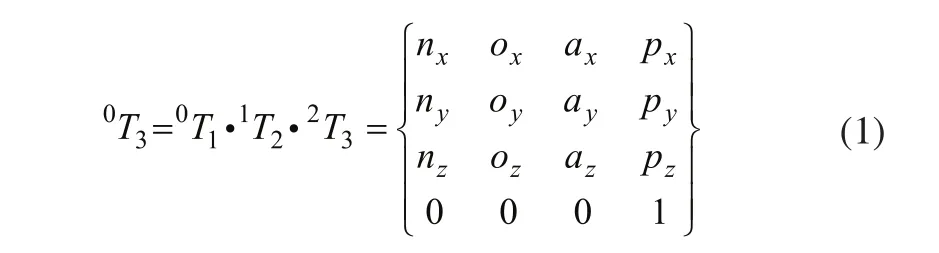
式(1)中:
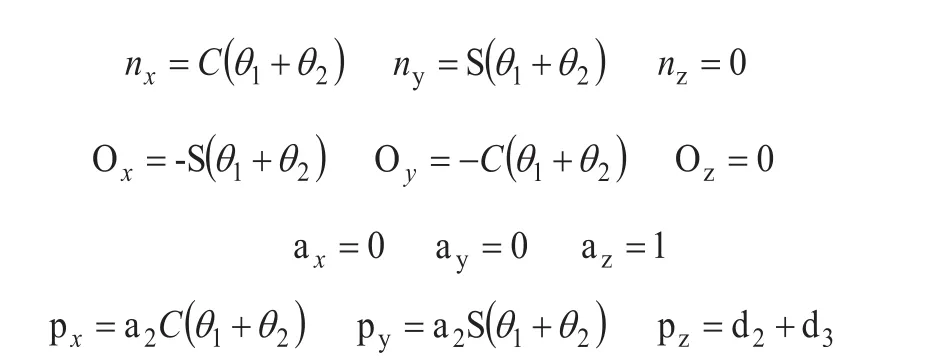
由于末端執行器姿態已知,根據旋轉貼片頭執行器末端在某一時刻的位置,可以很輕易的求出θ1、θ2。
2.2 旋轉貼片頭仿真分析
2.2.1 旋轉貼片頭的三維模型建立
由于ADAMS能與其他的CAD三維軟件(如Pro/E、SolidWorks、UG)無縫連接,我們在SolidWorks中建立其三維模型,再將建好的模型導入到ADAMS中并對其每一個構件的參數進行定義,并對各個零件添加運動副及施加驅動,其中主要約束為支撐座與大地鎖定、基體,齒輪軸和和大地創建轉動副、吸嘴桿組件和基體創建旋轉副連接。
2.2.2 旋轉貼片頭ADAMS仿真
如圖5所示,利用ADAMS軟件提供的一般點驅動定義旋轉貼片頭吸嘴的運動軌跡,由吸嘴運動帶動各個驅動軸運動,并通過ADAMS強大的測量功能得到對應的運動曲線。在后處理模塊中,將得到的運動曲線轉化為驅動軸運動的樣條曲線,完成運動學反解過程。再由這些函數定義旋轉貼片頭的運動軌跡,從而完成運動學的正解[7],求解流程如圖5所示。
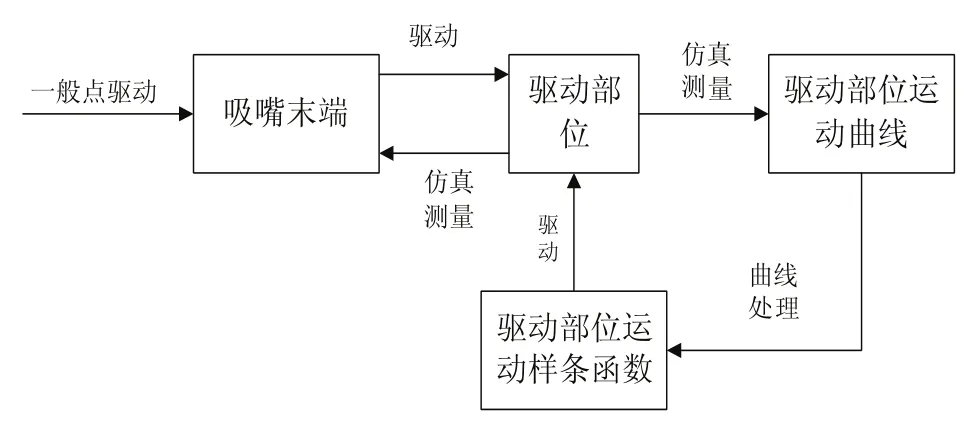
圖5 求解流程
設定吸嘴的運動軌跡,設置吸嘴繞Z軸旋轉及Z軸上下運動,在前0.3s內繞著Z軸旋轉30°,之后用0.3秒向下運動10mm,貼裝取芯片,在用0.3s回到原位。Z軸旋轉運動和Z直線運動速度驅動方程為分別為:
V旋轉=STEP(time,0,0,0.3,90d)
V直線=STEP(time,0.3,0,0.6,10)+STEP(time,0.6,0,0.9,-10)
設置仿真時間為1s,仿真步速100步。得到曲線如圖6、圖7所示。從圖7中看到吸嘴在移動的時候位置是均勻變化的,到達吸貼位置后又勻速返回,符合設計要求。

圖6 吸嘴角度隨時間變化曲線圖
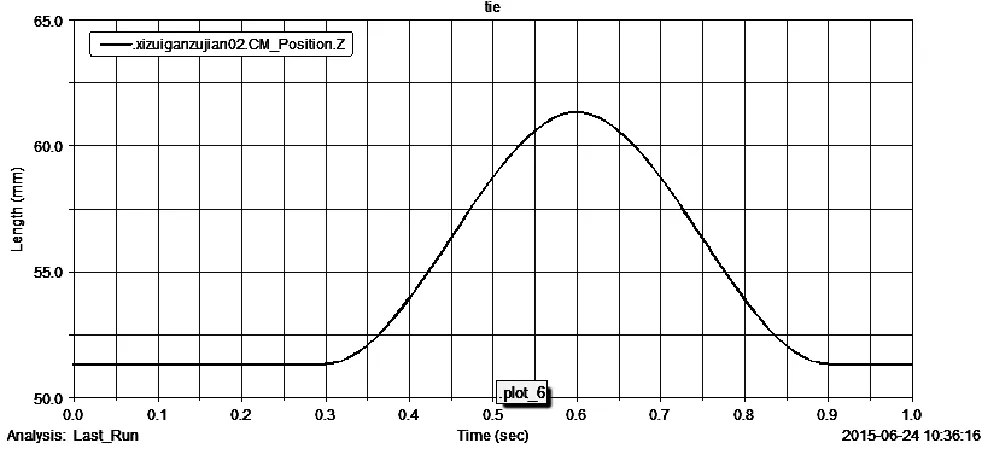
圖7 吸嘴位移隨時間變化曲線圖
在ADAMS的后處理模塊中,分別將吸嘴的角度—時間曲線、位移—時間曲線轉化為樣條曲線,并將樣條曲線分別命名為spline_0和spline_1,用于定義旋轉貼片頭的運動,并且令一般點驅動失效,設定仿真時間為1s,仿真步速為100步,開始仿真。仿真完成后測量吸嘴末端運動軌跡[6.8]。
吸嘴末端相對于基體坐標系分別在X、Y、Z方向的位移、速度、角速度曲線及合成曲線如圖6所示。

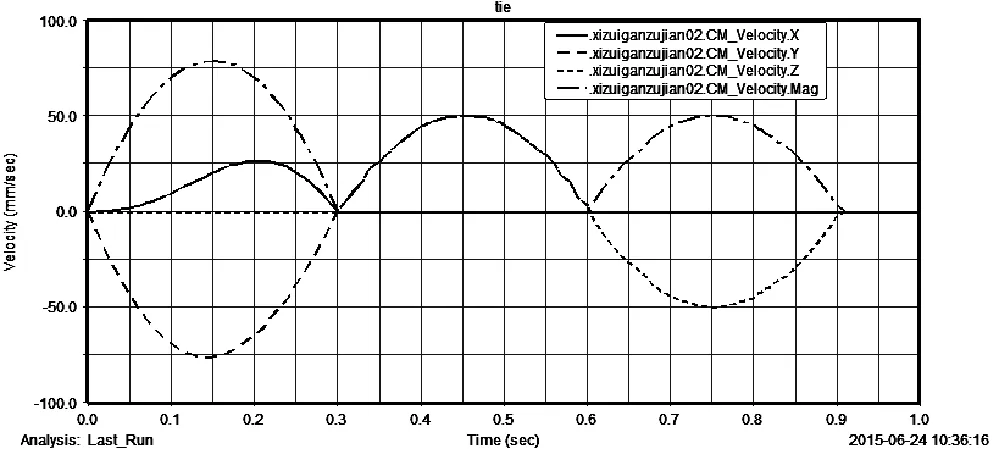

圖8 吸嘴末端位移、速度、角速度及其合成仿真曲線
圖8可以看出貼片頭在一個貼裝過程中位移、速度、角速度隨時間變化圖,0~0.3s對應的是貼片頭旋轉過程,0.3s~0.9s對應著一個吸嘴的貼裝過程,仿真曲線與最初設置的一般點驅動的軌跡具有很好的相似性。說明求解出來的驅動函數是準確有效的。圖8中吸嘴的速度與角速度曲線為正弦曲線,可以有效的用于指導驅動電機的運動控制。
3 結論
水平旋轉貼片頭整體結構緊湊,體積小,相對其他將貼裝頭簡單組合在一起的結構,貼裝頭整體的慣量減小,既提高了貼裝速度且對X-Y軸的加速度與速度影響不大,有效地解決了隨著貼裝頭增加影響X-Y軸的機械性能的問題。
針對旋轉貼片頭進氣管跟隨貼片頭旋轉而影響貼片頭工作的問題,本次設計采用進氣管安裝在支撐座上,利用軸套通氣使得個個吸嘴桿實現真空與吹氣,從而很好的解決這個問題。
運用D-H法建立運動學方程并運用ADAMS的運動學反解理論進行推導,通過其強大的測量和曲線分析功能,準確的獲得了水平旋轉貼片頭吸嘴末端位移、速度、加速度,并為后期電機選型及電機控制提供參數依據,并且能有效的縮短開發周期,減少開發成本。
參考文獻:
[1] 王劍薇,吳文鏡.貼片機核心部件貼裝頭的設計技術進展[J].湖南工業大學學報.2014(01):22-25.
[2] 宋福民,肖永山.貼裝頭設計研究[J].電子工業專用設備. 2009(05):55-57.
[3] 宋福民,等.轉盤式貼裝頭設計與檢驗研究[J].電子工業專用設備.2009(07):33-35.
[4] 劉少軍,肖永山,宋福民.轉盤式貼裝頭動力學仿真及實現[J]. 機械與電子.2006(07):64-67.
[5] 付宇.RFID標簽封裝設備貼裝頭設計與實現[D].華中科技大學,2011.
[6] 李軍,邢俊文,覃文潔,等.ADAMS實例教程[M].北京:北京理工大學出版社,2002.
[7] 丁佳洛,戰強.基于ADAMS 的串聯機器人運動學反解與動力學優化[J].機電產品開發與創新,2008(01):09-11.
[8] 劉宏偉.基于ADAMS 的五自由度機器人運動學仿真[J].機電產品開發與創新,2008(6):42-44.
[9] 付紅栓,趙恒華,楊輝.基于ADAMS 的并聯機床動力學逆解仿真[J].機械設計與制造,2013(5):94-95.
[10] 楊海強,周燦豐,高輝.基于UG和ADAMS的水下爬壁機器人的設計和動力學分析[J].制造業自動化,2015(4):49-51.
【上接第48頁】
體壁面的焊縫,另外運動過程中平穩,基本能夠貼合所提供的軌跡運動,沒有出現電機空轉或者鏈條打滑情況,同時在船體壁面上運動時,自適應機構能有效地控制鏈條的吸附模塊緊貼在壁面上運動,說明自適應機構有一定的曲面自適應能力,整個行走系統的設計是合理可靠的。
[1] 張廣欽.中國船舶工業發展現狀及未來展望[J].上海造船,2007,(4):10-11.
[2] 閆久江,趙西振,左干,李紅軍.爬壁機器人研究現狀與技術應用分析[J].機械研究與應用,2015,3(28):52-54.
[3] 陳偉.船體拋光小型機器人彎翹曲面行走系統[D].寧波:寧波大學,2014.
[4] Hongjun Li,Jiujiang Yan,Yawen Liu,Wei Chen.Research status and analysis of technology application for magnetic adsorption wall-climbing robots in china[A].2015 International Conference on Mechanical and Electrical Engineering[C].2015.
[5] 桂仲成,陳強,孫振國.多體柔性永磁吸附爬壁機器人[J].機械工程學報,2008,44(6):177-182.
[6] Wei Chen,Hang Zhou,Jianming Zhan.Modeling and Simulation of Adaptive Surface Tracked Vehicle Based on RecurDyn Open[J]. Journal of Modelling and Simulation,2013,1,37-41.
[7] 衣正堯,弓永軍,王祖溫,王興如.新型船舶壁面除銹爬壁機器人動力學建模與分析[J].機械工程學報,2010,46(15):23-30.
作者簡介:付志斌(1989 -),男,江西豐城人,碩士,研究方向為高效電子制造裝備。
基金項目:國家自然科學基金項目(面上項目,重點項目,重大項目)
收稿日期:2015-09-05
中圖分類號:TP23
文獻標識碼:A
文章編號:1009-0134(2016)01-0049-04
