櫻桃采摘機器人設計——基于PLC高速并聯自動化控制
2016-03-23 04:25:28郭素娜汪小志
農機化研究 2016年8期
張 麗,郭素娜,汪小志
(1.河南工業職業技術學院,河南 南陽 473000; 2.南昌工學院,南昌 330108;3.南昌大學,南昌 330031 )
?
櫻桃采摘機器人設計——基于PLC高速并聯自動化控制
張麗1,郭素娜1,汪小志2,3
(1.河南工業職業技術學院,河南 南陽473000; 2.南昌工學院,南昌330108;3.南昌大學,南昌330031 )
摘要:為了降低櫻桃采摘機器人采摘過程中的櫻桃破碎率,提高機器人的工作效率,設計了一款新的基于模糊控制和高速并聯自動化控制的機器人。該機器可以利用PC上位機對櫻桃圖像進行采集,并可以對圖像進行二值化、膨脹腐蝕處理,從而成功地識別成熟櫻桃;同時,可以使用模糊PLC控制方法對采摘機器人的響應角度誤差進行控制。為了驗證機器人的性能,使用櫻桃采摘試驗的方法對櫻桃采摘機器人的性能進行了測試。結果表明:高速并聯自動化控制的櫻桃采摘機器人總體采摘時間有了明顯的縮短,工作效率有所提高;通過模糊控制可以使采摘機器人角度的響應平穩地達到指定角度,且沒有出現大的超調量,有利于櫻桃的采摘,降低了破碎率。
關鍵詞:櫻桃采摘;機器人;超調量;PLC控制;高速并聯
0引言
櫻桃果實容易破碎,目前櫻桃收獲主要是靠人工小心完成的。但是,櫻桃的采摘期比較短,采摘工作必須在短時間內完成,否則會造成果實過熟而導致腐爛等。由于勞動力的短缺,加上勞動強度較大,櫻桃的種植規模受到了限制;并且櫻桃樹一般較高,采摘過程需要借助于梯子等,增加了作業的危險性。因此,為了節約勞動力、降低櫻桃采摘的破碎率,需要設計一款具有高識別能力、高控制精度及高作業效率的機器人。本次研究結合圖像處理技術和模糊控制技術對櫻桃采摘機器人進行了設計,以期得到一款新的櫻桃采摘機器人。
1 櫻桃收獲機器人總體設計
櫻桃收獲機器人總體是由4個自由度的機器人、三維視覺傳感器、主控制電腦和移動裝置組成。機器人高2.2m、寬1.2m、長0.8m,視覺攝像頭被安裝在機器人上,可以完成成熟櫻桃圖像的采集。
櫻桃采摘機器人的總體設計如圖1所示,主要使用了圖像識別技術和模糊控制技術。利用圖像識別技術可以成功地識別櫻桃的成熟度,使用模糊控制可以平穩地輸出櫻桃的采摘角度。機器人機械手主要由3部分組成,包括控制系統、驅動系統和手部執行末端,如圖2所示。

圖1 櫻桃采摘機器人總體設計框圖

圖2 機械手結構圖
機械手的設計方式很多,如夾持型、托持型和吸附型等,本文采用托持型。機械手的移動和旋轉動作都是由驅動系統來完成的,驅動系統還可以為手部執行末端提供一個剪斷力,通過剪斷櫻桃的梗,實現櫻桃的采摘作業。
圖3為本文設計的PLC控制的硬件結構圖。其中,各部分通過總線(電源總線、控制總線、地址總線、數據總線)連接而成;硬件結構主要包括各種數據接口和微處理器,微處理器主要負責圖像的處理加工。

圖3 PLC硬件結構圖
2機器人PLC控制和高速并聯設計
圖像識別技術是機器人自動化控制的基礎,櫻桃采摘機器人的關鍵設計部分包括圖像識別模塊,圖像識別主要是基于圖像分割技術的。令集合R代表的整個圖像區域,對R的圖像分割可以看作是將R分成N個滿足以下條件的非空子集R1,R2,…,RN,則

2)對于所有的i和j,i≠j,有Ri∩Rj=?;
3)對于i=1,2,…,N,有P(Ri)=TRUE;
4)對于i≠j,有P(Ri∪Rj)=FALSE;
5)對于i=1,2,…,N,Ri是連通的區域。

通過圖像識別,將角度的輸入的誤差(e)和誤差微分(ec)分別設置為7個模糊集,模糊子集為e,ec={NB,NM,NS,ZO,PS,PM,PB}。將輸出的ΔKP、ΔKD、ΔKI也分別設置為7個模糊集,模糊子集為ΔKP、ΔKD、ΔKI={NB,NM,NS,ZO,PS,PM,PB}。
應用模糊合成推理PID參數的整定算法,第k個采樣時間的整定為
KP(k)=KP0+ΔKP(k)
KI(k)=KI0+ΔKI(k)
KD(k)=KD0+ΔKD(k)
(1)
其中,KP0、KI0、KD0為經典PID控制器的初始參數,設計時可以借助MatLab的SIMULINK工具箱對參數進行仿真模擬和優化設計。仿真模擬框圖如圖4所示。

圖4 五輸入PID控制器
在此確定模糊化因子為ke=kec=0.01,解模糊因子為K1=0.5、K2=K3=0.01。系統的邏輯運算過程如圖5所示。
控制系統通過對模糊邏輯規則的結果處理、查表和運算,完成對PID參數在線自動校正,工作流程如圖6所示。

圖5 模糊控制系統邏輯運算過程

圖6 櫻桃采摘機械手PLC高速并聯設計
以PLC CPU+運動控制單元為核心,搭建機械手定增益PID 單軸誤差反饋運動控制和整機控制系統,可通過反饋調節的方式,實現PID誤差模糊控制過程,從而高質量、高速率地完成櫻桃采摘作業。
3櫻桃采摘機器人性能測試
為了測試設計的櫻桃采摘機器人的性能,通過櫻桃的采摘試驗,對機器人的櫻桃識別過程、自動化PLC采摘系統響應及并聯控制的工作效率進行測試,首先對測試系統對櫻桃的識別。
圖7為通過機器人的機器視覺采集得到的成熟櫻桃圖像示意圖。櫻桃采摘機器人的自動化實現過程需要完成對圖像的處理,由于彩色圖像是無法將完整的圖像信號傳輸給PLC控制的,因此需要將圖像轉換成二值圖,從而將圖像信號有效的轉換為電信號。二值圖的轉換效果如圖8所示。

圖7 成熟櫻桃采集圖像

圖8 櫻桃二值化圖
為了使圖像信號更加明顯,需要對櫻桃的二值化圖像進一步處理。通過膨脹腐蝕功能,得到了如圖9所示的結果。

圖9 櫻桃圖像膨脹腐蝕效果圖
由圖9可以看出:利用膨脹腐蝕效果可使成熟櫻桃圖像輪廓更加明顯,從而得到較好的圖像信號。
圖10為通過對機器人進行測試得的角度相應曲線。由圖10可以看出:在沒有加模糊控制時,系統具有較大的超調量,且系統不穩定,最后沒有平穩地輸出機器人的角度。為了使系統能夠較穩定的輸出角度量,需要使用模糊控制方法。
圖11為通過模糊控制得到的角度響應曲線。由圖11可以看出:通過模糊控制可以使角度的響應平穩地達到指定角度,且沒有出現大的超調量,控制效果非常平穩,有利于櫻桃的采摘,降低了破碎率。
為了對比本文設計機器人的高效率,對傳統機器人和本文設計機器人的櫻桃采摘破碎率進行了統計,最后對機器人的6次采摘結果進行統計,得到了表1所示的破碎率測試表。由表1可以看出:本文設計的機器人,櫻桃采摘破碎率有了明顯的降低,采摘效果較好。

圖10 角度響應曲線
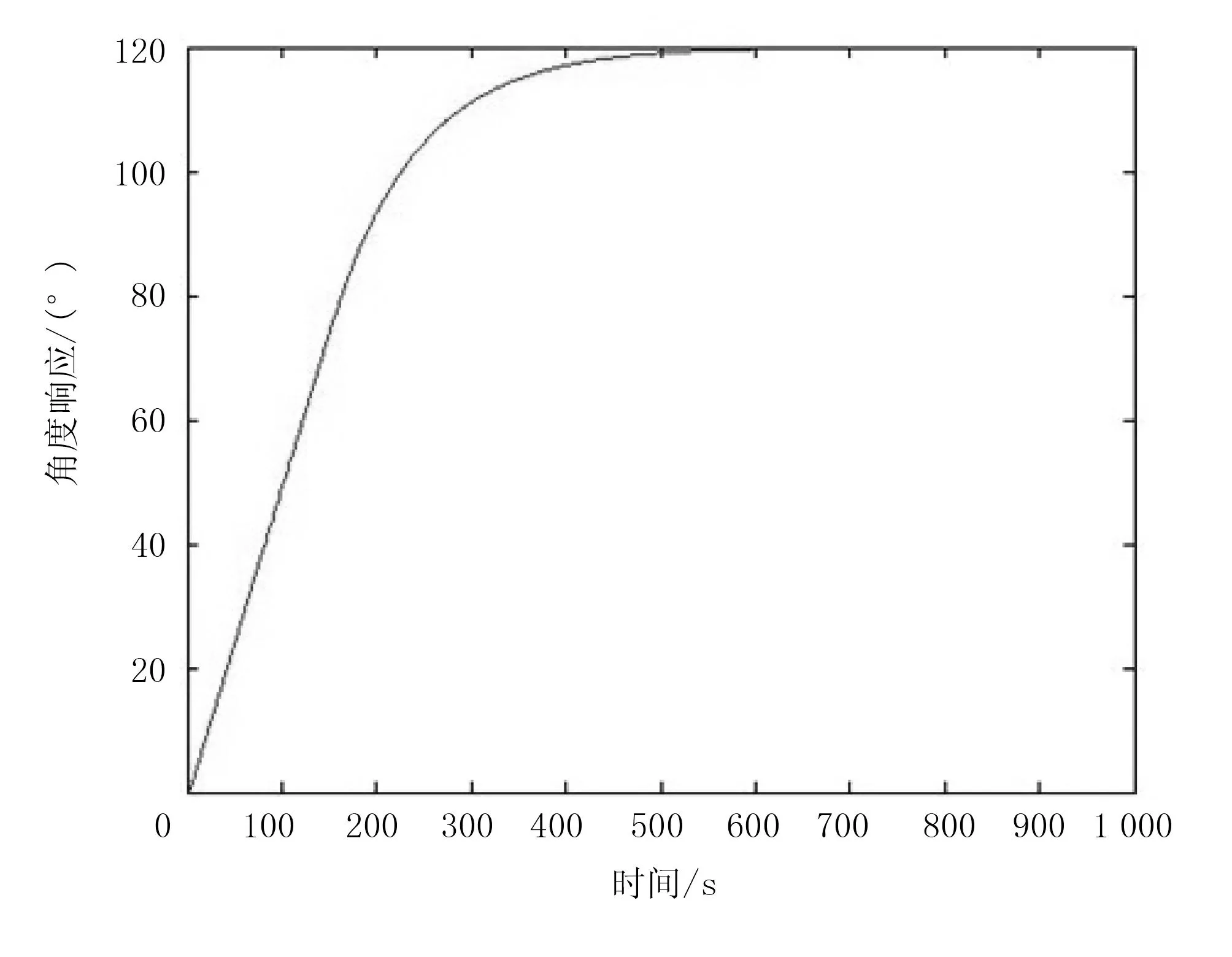
圖11 模糊控制角度響應曲線
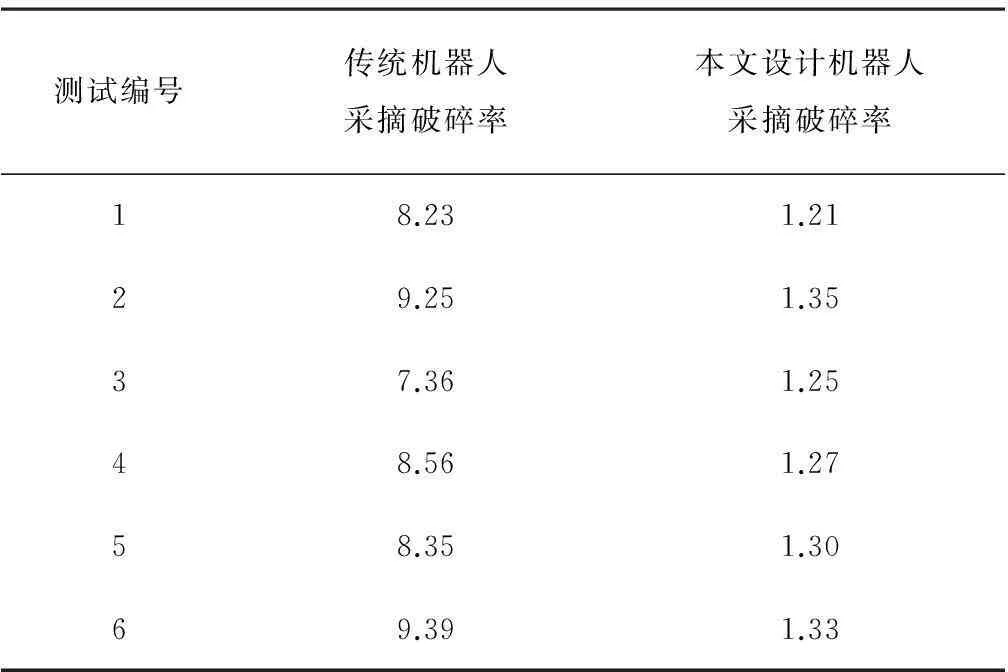
測試編號傳統機器人采摘破碎率本文設計機器人采摘破碎率18.231.2129.251.3537.361.2548.561.2758.351.3069.391.33
圖12為使用傳統機器人和本文設計機器人對采摘時間進行對比測試。由測試結果可以看出:使用本文設計機器人可以有效地降低一次采摘作業的時間,提高了采摘的作業效率。
4結論
設計了一款新的櫻桃采摘機器人,且將圖像二值化、膨脹腐蝕應用到了機器人機器視覺系統中;在控制系統中采用了PLC閉環反饋控制,提高了作業的精度;設計出了高速并聯協同作業的機械手,提高了作業的效率。
對機器人的性能進行了測試,通過測試結果可以看出:與傳統機器人相比,本文設計的機器人可以有效地完成圖像的處理過程,從而完成了成熟櫻桃的識別,降低了誤采率;控制過程比較平穩,控制精度較高,降低了采摘破碎率;采摘時間有了明顯的縮短,提高了工作效率。
參考文獻:
[1]段瑞玲,李慶祥,李玉和.圖像邊緣檢測方法研究綜述[J].光學技術,2005(3):415-419.
[2]魏偉波,芮筱亭.圖像邊緣檢測方法研究[J].計算機工程與應用,2006(30):88-91.
[3]宏福.圖像邊緣分割算法的優化研究與仿真[J].計算機仿真,2011(8):280-283.
[4]袁春蘭,熊宗龍.基于Sobel算子的圖像邊緣檢測研究[J].河海科技大學學報,2009,30(6):31-48.
[5]韋艷,陳華根.GPS定位顯示中的坐標轉換[J].海洋測繪,2010,30(3):16-19.
[6]郝冬,劉斌.基于模糊邏輯行為融合路徑規劃方法[J].計算機工程設計,2009,30(3):660-663.
[7]王建軍,武秋俊.機器人在農業中的應用[J].農機化研究,2007(7):174-176.
[8]王儉,趙鶴鳴,陳衛東.基于子區域的機器人全覆蓋路徑規劃的環境建模[J].蘇州科技學院學報:工程技術版,2004,17(1):72-75.
[9]馮秀軍,楊立東.2BDY-8型2壟密型高速氣吹式精密播種機簡析[J].農業機械,2007(8):85-86.
[10]王建軍,武秋俊.機器人在農業中的應用[J].農機化研究,2007(7):174-176.
[11]郝冬,劉斌.基于模糊邏輯行為融合路徑規劃方法[J].計算機工程設計,2009,30(3):660-663.
[12]孟慶山.水源熱泵機組變流量水系統節能優化探討[J].制冷與空調,2010,10(1):84-89.
[13]謝志勇,張鐵中,趙金英.基于 Hough 變換的成熟草莓識別技術[J].農業機械學報,2007,38(3): 106-109.
[14]王東,趙宇,王秀紅.一種改進的DFT迭代的MIMO-OFDM系統信道估計算法[J].應用科技,2009,3(3):19-22.
[15]徐文穎,張靜,董建萍.導頻信道估計中的插值算法[J].上海師范大學學報,2007,12(6):41-46.
[16]陳暉,陳曉光.基于直接判決導頻跟蹤的OFDM系統快時變信道估計[J].通信學報,2006,9(27):1-5.
[17]李文見,姬江濤.輪履復合式農業機器人越避障控制研究[J].河南科技大學學報:自然科學版,2007(8):57-59.
[18]王仲民,戈新良,唐智強.多傳感器信息融合技術研究現狀和發展趨勢[J].河北工業大學學報,2003,32(2): 30-35.
[19]國剛, 王毅.應用BP神經網絡進行手寫體字母數字識別[J].人工智能及識別技術,2008,4(6):1459-1460.
[20]施少敏,馬彥恒,陳建泗.基于BP神經網絡的數字識別方法[J].兵工自動化,2006,25(10): 40-41.
Design of Cherry Picking Robot——Based on PLC High-speed Parallel Automatic Control
Zhang Li1, Guo Suna1, Wang Xiaozhi2,3
(1.Henan Polytechnic Institute, Nanyang 473000, China; 2.Nanchang Institute of Science & Technology, Nanchang 330108,China; 3.Nanchang University,Nanchang 330031,China)
Abstract:In order to decrease the broken rate of picking robot in the process of picking cherry, and enhances the working efficiency of the robot, a new robot based on fuzzy control and high speed parallel automation control has been designed. The machine can use PC for cherry image acquisition, and can be conducted for image binarization, expansion corrosion process, thus successful identification of ripe cherry, you can use the fuzzy PLC control method, response to control the Angle error of picking robot. In order to verify the performance of the robot, the use of cherry picking experimental method for cherry picking robot performance was tested. Through test, found that high speed parallel automatic control overall pick cherry time was shortened obviously, improve the work efficiency of the robot, through fuzzy control can make the point of view of picking robot response smoothly to achieve the specified Angle, and there are no big overshoot, which is good for cherry picking, reduce the breakage rate.
Key words:cherry pick; robot; overshoot amount; PLC control; high-speed parallel
中圖分類號:S225.93;TP242;TP273
文獻標識碼:A
文章編號:1003-188X(2016)084-0199-05
作者簡介:張麗(1979-),女,河南南陽人,講師,碩士。通訊作者:汪小志(1981-),女,武漢人,講師,博士研究生,(E-mail)wangxiaozhi@ncu.edu.cn。
基金項目:湖北省自然科學基金項目(2014CFB322)
收稿日期:2015-05-27
