基于模糊控制的拖拉機路徑跟蹤仿真研究
2016-03-23 04:25:32張長龍
農機化研究 2016年8期
石 翔,馬 蓉,張長龍,梁 錦
(石河子大學,新疆 石河子 832003)
?
基于模糊控制的拖拉機路徑跟蹤仿真研究
石翔,馬蓉,張長龍,梁錦
(石河子大學,新疆 石河子832003)
摘要:結合拖拉機實際工作性能與環境,建立了一種基于模糊控制的拖拉機路徑跟蹤仿真系統,分別對簡化二輪模型、模糊控制模型、純追蹤模型及轉向操縱控制模型等4個部分進行了闡述。此外,將模糊控制與純追蹤模型結合,分別對相同橫向偏差下、不同航向偏差下前輪轉角響應情況和相同航向偏差下、不同橫向偏差下前輪轉角響應情況進行了Matlab/Simulink仿真。仿真結果表明:該仿真系統可靠,具有一定的參考價值。
關鍵詞:拖拉機;路徑跟蹤;模糊控制;純追蹤模型
0引言
現代農業生產正向現代化、信息化、精準化發展,而拖拉機作為主要動力機械,為了更好地完成作業,自主導航是必不可少的。國內許多學者對自主導航進行大量研究[1],但是缺乏對拖拉機路徑跟蹤必要的仿真研究。張智剛[2]以水田插秧機為實驗平臺,部分提到了其仿真系統,主要包含二輪車模型、純追蹤模型、轉向操縱控制模型和必要的輸出環節4個部分,采用EITAE優化前視距離提供仿真數據。賈全[3]大致描述了仿真模型,通過調節前視距離達到最優跟蹤效果,但缺乏細致描述與仿真結果分析。此外,單一的前視距離并不能滿足多變而復雜的農田作業環境。
本文從路徑跟蹤技術入手,結合國內外發展狀況,詳細論述拖拉機路徑跟蹤仿真系統的各個部分,完善模塊功能。此外,選擇純追蹤模型與模糊控制相結合方法,目的在于提高拖拉機作業環境適應能力與跟蹤精度。
1系統總體設計
本文設計的仿真系統包括二輪車模型、模糊控制模型、純追蹤模型及轉向操縱控制模型等4個部分。路徑跟蹤系統控制框圖如圖1所示。
簡化二輪車模型用于模擬拖拉機運動學規律,主要用于航向偏差和橫向偏差解算;模糊控制模型根據輸入的橫向偏差和航向偏差,為純追蹤模型提供前視距離;純追蹤模型實現直線路徑跟蹤條件下期望轉向輪偏角的決策;轉向操縱控制模型是對拖拉機轉向系統的描述, 模型輸入是期望轉向輪偏角, 輸出是實際轉向輪偏角。

圖1 控制框圖
2仿真系統搭建
2.1 二輪車模型
拖拉機采用應用廣泛的車輛二輪模型,假定車速不變,行駛地面平整,不計車輛的側滑和離心力,可將拖拉機看出一階慣性環節,其運動學模型為[4]
(1)

2.2 模糊控制模型
模糊控制不依賴精確的數學模型,適宜解決非精確數學模型的復雜控制系統的控制問題。通過對橫向偏差與橫向偏差模糊化,根據編寫的模糊規則,計算得出前視距離。
利用MatLab提供基于模糊邏輯的系統設計工具,通過良好的圖形界面,完成模糊推理系統編輯器、隸屬函數編輯器及模糊規則編輯器等工作。其中,通過對模糊規則觀察器調試,查看規則運作情況與各隸屬函數形狀對結果的影響,進行調整規則、參數大小等,使模糊控制器效果更好,模糊曲面光滑[5-6]。
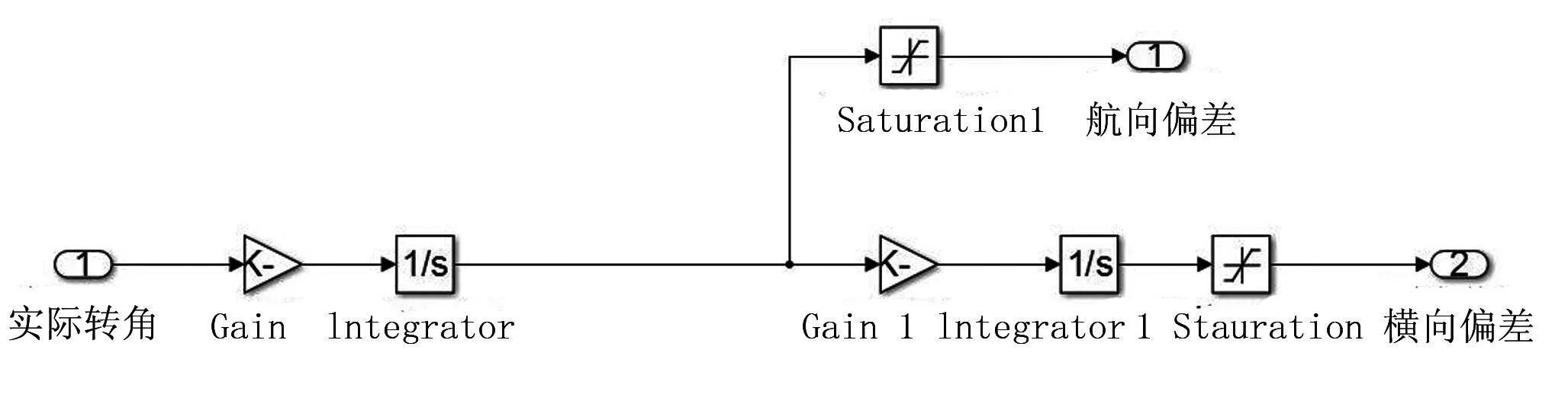
圖2 二輪車運動學仿真模型
2.3 純追蹤模型
純追蹤模型方法易于理解,方便掌握,可操作性強,僅需調節前視距離參數,同時前視距離的選擇也直接影響路徑跟蹤精度。

圖3 純追蹤模型幾何解析圖
圖3中的車體坐標系O′X′Y′中,點P(x′,y′)為路徑上的目標點;E為前視距離;R則是該弧段的半徑。x′、L′與R的幾何關系式為
D+x′=R
(2)
D2+y′2=R2
(3)
x′2+y′2=E2
(4)
由式(2)~式(4)得出
(5)
其中,x′為橫坐標。在直線跟蹤情況下x′的計算公式[7]為

(6)
其中,pe為為橫向偏差,ψe為航向偏差。
根據簡化的二輪模型[8],可得出車體轉向輪偏角和轉彎半徑之間關系為
δ=arctan(L/R)
(7)
其中,δ為轉向輪偏角,L為車體軸距。
由式(5) ~ 式(7)可得到直線跟蹤條件下純追蹤模型計算的轉向輪偏角控制量為
(8)
其中,ψe、pe可由數學解算出,只有前視距離E未確定。根據式(8),純追蹤模型搭建如圖4所示。
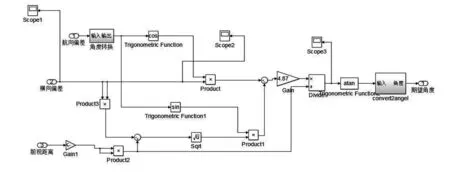
圖4 純追蹤模型結構圖
2.4 轉向操縱控制模型
轉向操縱模型作為拖拉機作業的重要執行端,通過對拖拉機轉向系統的特性進行分析,其傳遞函數可表示為
(9)
其中,Y(s)為期望前輪轉角的拉氏變換;F(s)為實際前輪轉角的拉氏變換。利用實驗記錄實際前輪轉角和期望前輪轉角,通過MatLab整定計算,可求得τ≈0.2。此外,由于轉向系統選擇的是步進電動機驅動,步進電機定位較為精確,且易于操縱。在不考慮步進電機力矩不足條件下,可視為步進電機的控制實際上是開關控制,構成閉環控制時,電機的轉向取決于偏差的極性。該過程類似于繼電器特性,為使仿真貼合實際,人為加入限定偏差允許范圍,此時步進電機的運行方式具有帶死區的繼電器特征。步進電機驅動下的轉向閉環結構框圖可以表達為圖5的形式。
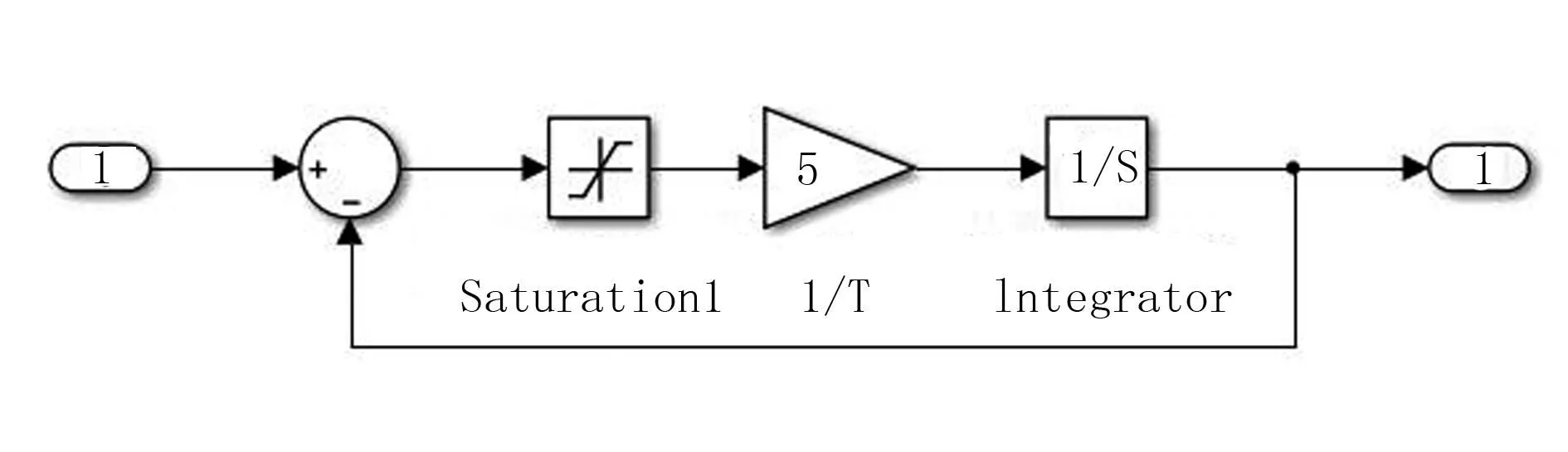
圖5 轉向系統閉環控制結構圖
3系統模糊控制方法
3.1 輸入輸出變量的模糊化
分別對橫向偏差、航向偏差、前視距離模糊化。其中,前視距離的選擇將直接影響路徑跟蹤效果。
1)橫向偏差pe。基本論域:[-60,60](cm);量化等級:{ -6,- 5,-4,-3,-2,-1,0,1,2,3,4,5,6} ;量化因子Ky=6 /60 = 1/15。
2)航向偏差Ψe。基本論域: [-90,90](°); 量化等級: { -6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6} ; 量化因子Ky=6 /90 = 1/15。
3)前視距離E。基本論域:[0,600 ](cm);量化等級: { -6,- 5,-4,-3,-2,-1,0,1,2,3,4,5,6} ; 量化因子Ky=6×2 /600 = 0.02。
橫向偏差y、航向偏差Ψ和前視距離E這3個變量的模糊等級均為: 負大( NB) 、負中( NM) 、負小( NS) 、零( ZO) 、正小( PS) 、正中( PM) 、正大( PB) 。
3.2 模糊控制規則表設計
模糊控制規則表設計原則為:橫向偏差作為首要關注對象,應盡快地減少橫向偏差,使拖拉機追蹤目標路徑;當橫向偏差持續減少時,應增加系統的穩定性,體現在拖拉機轉向波動較小,直到完全追蹤直線路徑。
在設計控制規則之前,規定橫向位置偏差、航向偏差和前輪轉角的正負號如下:導航車位于導航線右側時橫向位置偏差為正,左側為負;航向偏差順時針為正,逆時針為負;轉向輪右轉為正,左轉為負。如圖6所示,C為跟蹤路徑,車體在導航線左側,則橫向偏差為負,航向偏差為負,前輪應順時針轉動,為正。

圖6 車體與路徑位置關系
根據駕駛員的操作經驗,將拖拉機路徑跟蹤過程及作業環境中遇到的各種可能出現情況及相應的控制策略可用49條模糊語句來描述。限于篇幅,不一一列舉。這些條件語句構成路徑跟蹤控制模糊控制模型,路徑模糊控制規則如表1所示,模糊控制曲面如圖7所示。
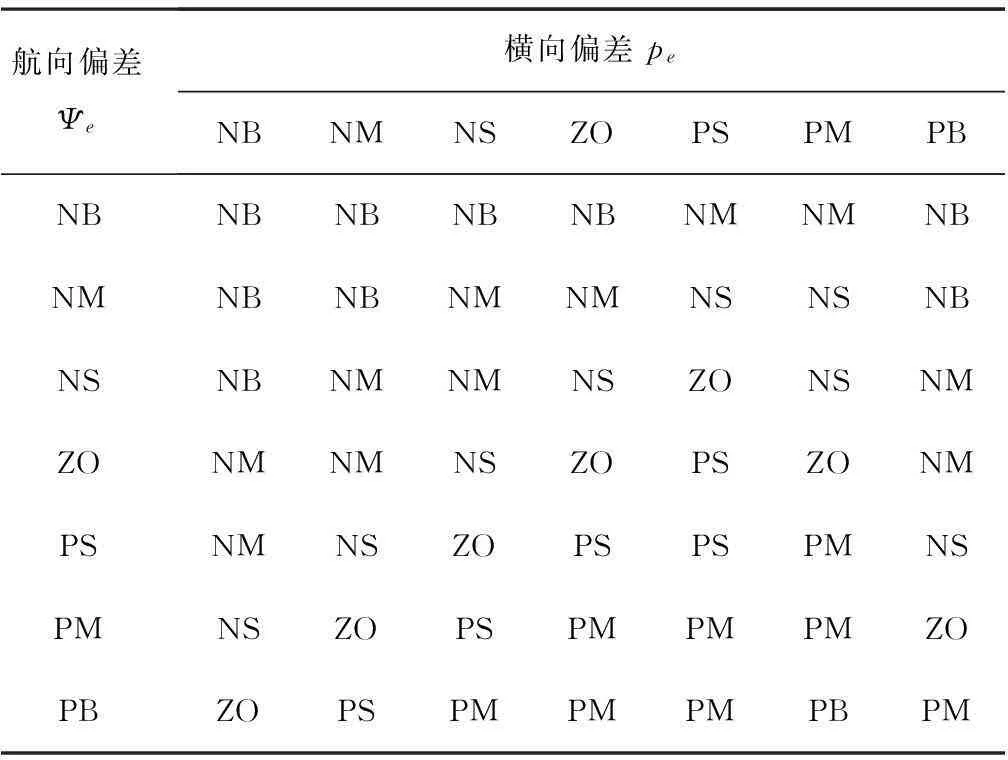
表1 模糊控制規則表

圖7 模糊控制曲面
4系統模擬仿真結果分析
綜上所述,將二輪車簡化二輪車模型、模糊控制模型、純追蹤模型、轉向操縱控制模型和必要的輸出環節在MatLab/Simulink中搭建,如圖8所示。
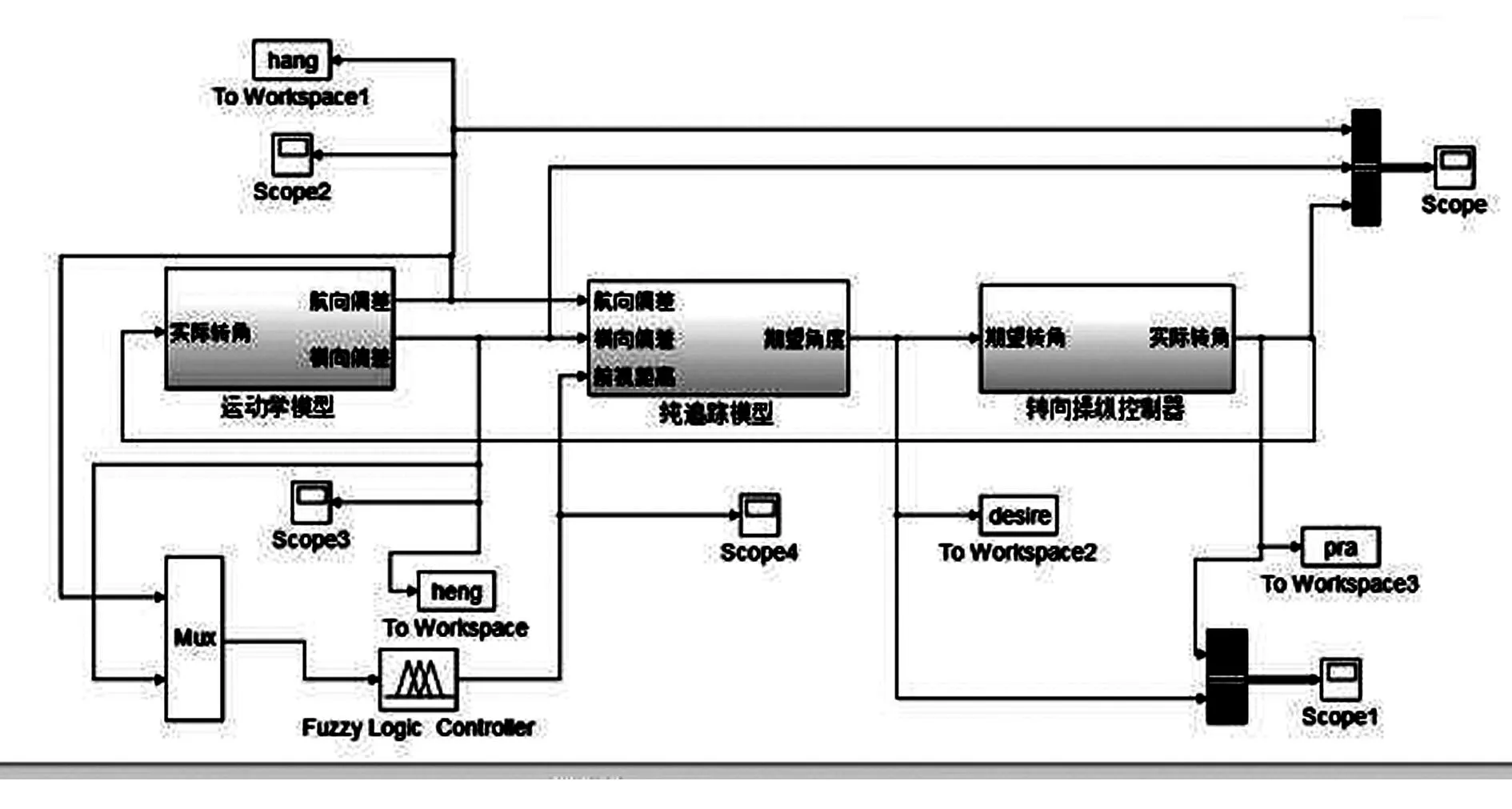
圖8 導航系統simulink模型圖
在仿真過程中,速度V的取值范圍為[0,1]m/s,軸距為2.435m,該參數來自實驗室TN654拖拉機。在車速V=1m/s,橫向偏差為0.4m,航向偏差分別取20°、40°、60°,前輪初始轉角為0°的前提條件下,對路徑跟蹤模型進行仿真,結果如圖9所示。此外,在航向偏差為40°,橫向偏差分別為0.2、0.4、0.6m條件下(初始轉角為0°的),對路徑跟蹤模型仿真,結果為圖10所示。

圖9 前輪轉角變化曲線(pe=0.4m)

圖10 前輪轉角變化曲線(Ψe =40°)
通過仿真數據對比可知:在橫向偏差一定、不同航向偏角條件下,前輪轉角響應明顯,且隨著航向偏差增加,系統響應速度加快,有效抑制偏差增加;而在航向偏差一定、不同橫向偏差條件下,各個前輪轉角相差并不大。這是由于拖拉機作業時車速視為恒速,前輪轉角不宜大幅度波動,前輪轉角在穩定的條件下,不斷小幅度調整向期望路徑靠近,直到完全跟蹤路徑。
前視距離統計表如表2所示。由表2數據對比可知:在橫向偏差一定及不同航向偏差條件下,前視距離變化不大,呈現遞減趨勢。由于航向偏差為次要衡量指標,故前視距離變化不大。而在特定航向偏差及不同橫向偏差條件下,前視距離變化較為明顯,符合駕駛員的操作經驗,即橫向偏差大小將決定前視距離的遠近。綜上所述可知:仿真結果符合拖拉機路徑跟蹤控制思想,前視距離的變化趨勢符合模糊控制規則的設定。

表2 前視距離統計表

項目Ψe=40°橫向偏差0.2m橫向偏差0.4m橫向偏差0.6m前視距離/m3.803.242.65
5結論
1)本文完成了對拖拉機路徑跟蹤仿真系統的搭建。將各個部分詳細闡述并在MatLab/Simulink中完整搭建,部分環節加入繼電特性,從而更加貼近實際生產。此外,通過加入必要的輸出環節,有利于后期數據分析。
2)模糊控制的加入既考慮了前輪轉角的響應速度,抑制航向偏差加大,又考慮了在路徑跟蹤時的穩定性,避免奇異值出現,非單一的前視距離將大大提高路徑跟蹤能力。該路徑跟蹤仿真系統在一定程度上反應了拖拉機在實際生產作業中的性能與需求,將為后期實驗提供參考意義。
參考文獻:
[1]姬長英,周俊.農業機械導航技術發展分析[J].農業機械學報,2014,45(9):44-54.
[2]張智剛,羅錫文,趙祚喜,等.基于 Kalman 濾波和純追蹤模型的農業機械導航控[J].農業機械學報,2009,40(S):6-12.
[3]賈全.拖拉機自動導航系統關鍵技術研究[D].北京:中國農業機械化科學研究院,2013.
[4]周建軍,張漫,汪懋華,等.基于模糊控制的農用車輛路線跟蹤[J].農業機械學報,2009,40(4):151-156.
[5]張國良,曾靜,柯熙政,等.模糊控制及其MATLAB應用[M].西安:西安交通大學出版社,2002.
[6]王江,付文利.基于MATLAB/Simulink系統仿真權威指南[M].北京:機械工業出版社,2013.
[7]Anibal Ollero ,Guillermo Heredia. Stability analysis of mobile robot path tracking[C] //Proceedings of the IEEE/ RSJ International Conference on Intelligent Robots and Systems.Pittsburgh:PA, 1995,3:461-466.
[8]黃沛琛. 基于純追蹤模型的插秧機地頭轉向控制方法[D].廣州: 華南農業大學, 2009.
Simulation Study on Tractors Path Tracking Baesd on Fuzzy Control
Shi Xiang, Ma Rong, Zhang Changlong, Liang Jin
(College of Mechanical and Electrical Engineering,Shihezi University,Shihezi 832000,china)
Abstract:Combined with environmental effects and performance,simulation model of tractors path tracking based on fuzzy control is established. The model includes kinematics simulation model of two-wheel vehicle,fuzzy control model,pure pursuit model and a model of steering system. In addition, by combining the fuzzy controller with the pure pursuit model,this paper simulates the response curves of the same lateral error with different heading errors and the same heading error with different lateral errors respectively,which used Matlab//Simulink. By the model built in Matlab / Simulink,results of simulation indicate the model is reliable and valuable.
Key words:tractor; pathtracking; fuzzy control; pure tracing model;
中圖分類號:S219;S391.9
文獻標識碼:A
文章編號:1003-188X(2016)08-0237-05
作者簡介:石翔(1991-),男,新疆石河子人,碩士研究生,(E-mail)xangzi@foxmail.com。通訊作者:馬蓉(1974-),女,新疆石河子人,教授,碩士生導師,(E-mail)lzymrhs@163.com。
基金項目:國家高技術研究發展計劃項目(2013AA102307)
收稿日期:2015-07-13
