農用無人機縱向姿態控制系統設計及仿真
2016-03-23 07:27:04張長利王樹文王潤濤張伶鳦欒吉玲周雅楠
農機化研究 2016年10期
關鍵詞:仿真
劉 超,張長利,王樹文,王潤濤,張伶鳦,呂 濤,欒吉玲,周雅楠
(東北農業大學 電氣與信息學院,哈爾濱 150030)
?
農用無人機縱向姿態控制系統設計及仿真
劉超,張長利,王樹文,王潤濤,張伶鳦,呂濤,欒吉玲,周雅楠
(東北農業大學 電氣與信息學院,哈爾濱150030)
摘要:針對農用無人機的作業特點和應用領域,設計了一種基于經典PID控制方法的縱向姿態控制系統。首先,利用MatLab軟件建立了無人機在配平點處的縱向運動數學模型,分析了無人機的縱向運動規律。在此基礎上,采用經典PID理論對無人機縱向運動的俯仰角控制回路和高度控制回路進行設計。通過Simulink軟件進行仿真實驗,結果表明:該飛行姿態控制系統控制效果良好,可以滿足農用無人機的技術要求。
關鍵詞:農用無人機;縱向姿態;PID控制,仿真
0引言
農用無人機是現代農業系統中的重要組成部分,具有中低空飛行、巡航速度低、載重量大的特點[1]。無人機在空中的正常作業依賴于無人機本身是否具有一套合適的飛行姿態控制系統。梅勁松[2]等利用特征模型和模糊控制對無人機的飛行姿態進行控制。唐勝景、宋祥[3]等設計了模糊-積分混合控制器,并利用遺傳算法對無人機飛行姿態進行較精確的控制。以上技術的運用雖然較穩定地控制了無人機的飛行姿態,但主要采用工業和軍事等領域的控制方法,開發難度較大,操作復雜度高,不適于大范圍面向農業應用。農用無人機面向民用領域,要求系統具有高效、穩定和實際應用性強的特點,所以設計一種適用于農用無人機的姿態控制系統是十分必要的。
本設計考慮到無人機的應用領域及操作對象,選擇利用經典PID控制方法設計農用無人機縱向控制系統,為解決上述問題提供了新的思路和方法。此方法具有操作簡便、實用性強、造價低且性能穩定的特點,可以滿足無人機在空中作業的技術要求。在設計過程中,采用了MatLab軟件對樣機進行數學建模,得到無人機的縱向運動數學模型;再利用Simulink仿真環境進行仿真,逐步調節各項參數,提高了無人機飛行姿態的穩定性。
1農用無人機縱向運動數學模型的建立
無人機的運動方程以微分方程的形式體現無人機的狀態參數隨時間變化的規律[4]。在無人機的建模仿真中,以無人機的運動方程為基礎,推導傳遞函數來進行仿真,從而判斷所設計的控制系統是否穩定可控。所以,建立無人機數學模型是至關重要的。
1.1 農用無人機運動的假設
由于農用無人機本身是一個復雜的動力學系統,在飛行過程中各參數受到機身質量、結構、所處環境、地球曲率、重力加速度及高度等時變因素的影響。如果將這些因素全部考慮在建立運動方程中,將是極其復雜而且不利于分析的。但是,在農用無人機特定的運動規律中,受到以上因素的影響極小,所以本文忽略以上因素對分析飛行的影響[5]。
1.2 農用無人機縱向非線性模型常用坐標及參數
分析農用無人機運動規律一般需要的坐標系分別是地面坐標系和機體坐標系[6]。
無人機參數包括姿態角、氣流角、機體坐標系的速度分量和機體坐標系角速度分量。姿態角由機體坐標系和地面坐標系的關系確定,包括俯仰角θ、偏航角φ和滾轉角φ。空速V與機體坐標系之間的關系確定了氣流角(迎角α和側滑角β)。機體坐標系角速度分量(p,q,r)是無人機飛行過程中相對于地面坐標系轉動角速度ω在機體坐標系各軸上的分量。機體坐標系的速度分量(u,v,w)是無人機上空速計所測得的空速在機體坐標系各軸上的分量[7]。
1.3 農用無人機縱向數學模型的建立
根據運動學方程和動力學方程確定了無人機的運動方程,運動方程確定了輸出向量與輸入量之間的非線性函數關系。在建立農用無人機的非線性數學模型時,只需要確定無人機的相關飛行參數,就可以得到飛機任意時刻的飛行狀態[8]。
運動學方程主要根據牛頓第二定律建立起來,表示作用在飛機上的力和力矩,其表達式為
(1)
其中,Fx、Fy、Fz是作用在無人機上的力矩,m為實驗無人機質量。
(2)
其中,Mx、My、Mz為無人機所受力矩;I為各軸轉動慣量。
動力學方程主要表示角速度分量在各坐標系之間的轉換關系,分為角運動和線運動。角運動中3個角速率表達式為


(3)
(4)
研究無人機的縱向運動時,需要去除橫向運動的影響。這時,飛行器進行的是無滾轉和無側滑運動,即φ=β=0。將以上建立的無人機運動方程化簡解耦為縱向運動表達式,如式(4)所示。其中,D為機體受到的阻力;T為發動機推力;L為機體所受升力。其他變量在上述推導中已經注明。
分析無人機縱向運動時,需要在無人機飛行過程中選取一個基準點作為基礎狀態配平點[9],為非線性運動方程的線性化做準備。基準點的選擇必須以無人機的對稱運動作為基準運動。配平前需要掌握飛機的詳細機體參數,再確定配平點的飛行速度和高度,然后通過調整舵機的舵偏轉使力和力矩平衡,使之消除橫向運動對實驗結果產生的影響,最后利用軟件完成配平處理。本文采用基于Simulink對非線性模型進行配平[10]。
無人機狀態方程在配平點處配平后得到的是非線性方程,將非線性方程基于小擾動原理進行線性化處理,得到無人機線性化小擾動運動方程組的線性時不變系統的形式為[11]
(5)
其中,x 是狀態向量,u 是輸入向量。
已知樣機的部分試驗參數如表1所示。
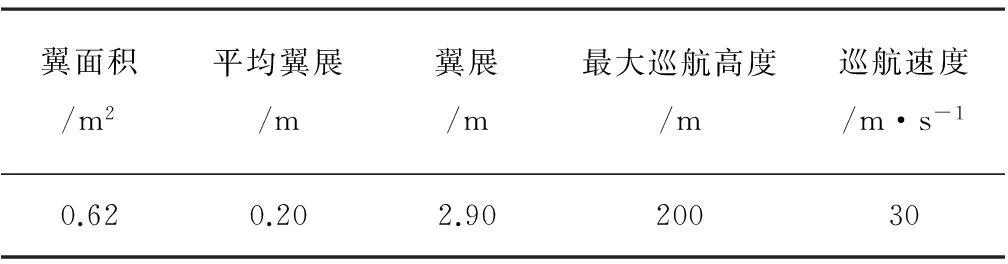
表1 無人機主要參數
選取平衡點進行配平和線性化處理之后,得到無人機的縱向運動的線性狀態空間表達式為
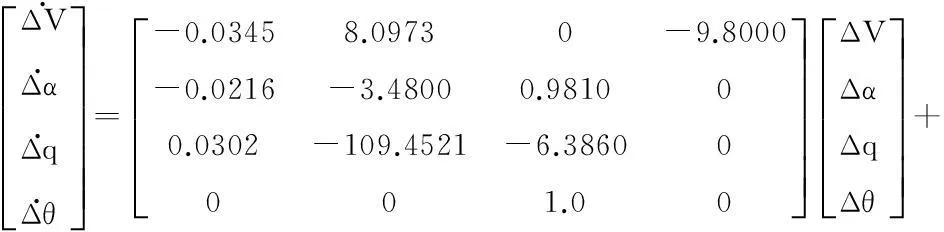
(6)
其中,x=[ΔV,Δα,Δθ,Δq]T,u=Δδe。表達式矩陣系數分別為
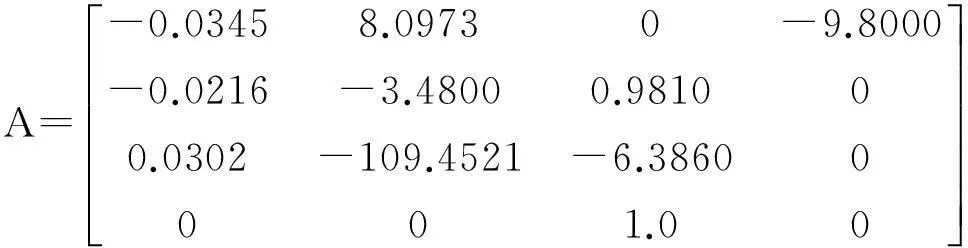
本章建立了無人機運動方程,并結合無人機參數在配平點處進行配平及線性化處理,得到了無人機空間狀態方程和矩陣系數,為下面農用無人機的縱向控制規律的設計和仿真實驗打下了基礎。
2農用無人機縱向姿態控制系統設計
2.1 農用無人機縱向姿態控制方法
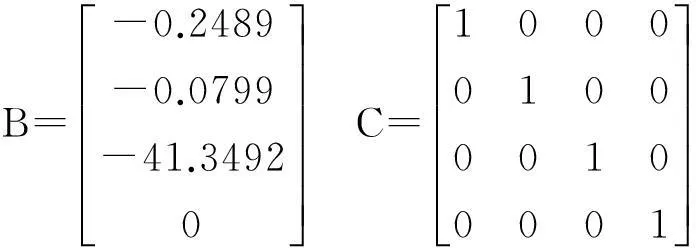
PID控制是控制系統中經常采用的控制算法,具有單獨的控制規律的特點[12]。PID控制器的框圖如圖1所示。
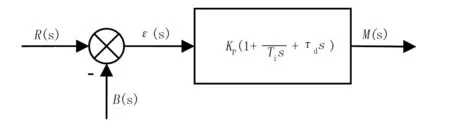
圖1 PID控制器框圖
由圖1可知PID控制系統的傳遞函數為
(7)
由式(7)可知:比例積分微分控制器的積分環節提高了系統的穩態性能[13];其相位裕度的增加減少了系統的調節時間,快速性得到了增強[14]。
2.2 縱向控制系統設計
農用無人機的縱向控制系統包括兩個閉環回路:俯仰角控制回路和高度保持回路。一般飛行環境下,在改變俯仰角使飛機飛行姿態發生變化時,飛機重心才可能發生變化。所以,本文設計的縱向控制系統中,
以無人機的俯仰角的變化為主要被控對象。在飛行過程中,高度的變化也是縱向運動的變化量。本文所設計的高度控制回路通過俯仰角控制高度的方法進行設計。
2.2.1俯仰角控制回路
本文所設計的無人機俯仰角控制回路如圖2所示。當無人機接受姿態變化信號開始改變飛行姿態時,是無人機縱向運動的初始階段,此階段具有時間短暫、短周期運動模態占主導地位、空速和俯仰角增量變化不大的特點,在分析時認為空速和俯仰角的變化為0。則式(7)可以由四自由度方程簡化為二自由度方程,其系數矩陣為


由上述短周期二自由度空間狀態方程轉化為傳遞函數定義為[15]G2(s)=(SI-A)-1B。通過計算,得到以升降舵偏轉到俯仰角速率的傳遞函數為
(8)
(9)
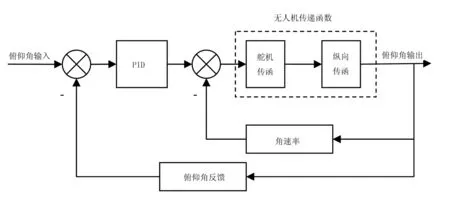
圖2 俯仰角控制回路
根據式(9),應用MatLab軟件作出無人機傳遞函數根軌跡曲線,如圖3所示。俯仰角內回路閉環系統根軌跡增益值Kq隨著曲線的變化而改變:當Kq=0.431時,阻尼比為0.382,此時系統阻尼比較大;在此增益點前后,阻尼比逐漸減小,所以確定內回路閉環增益值為0.431。
在得到內回路的閉環傳遞函數后,作出向前通道的傳遞函數根軌跡圖,如圖4所示。確定外回路增益值Kθ=0.845時,得到俯仰角閉環系統的整體傳遞函數為
G(θ)=(413.485s+1351.913)/(s4+19.866s3+
317.6367s2+2228.0268s+1142.3665)
(10)
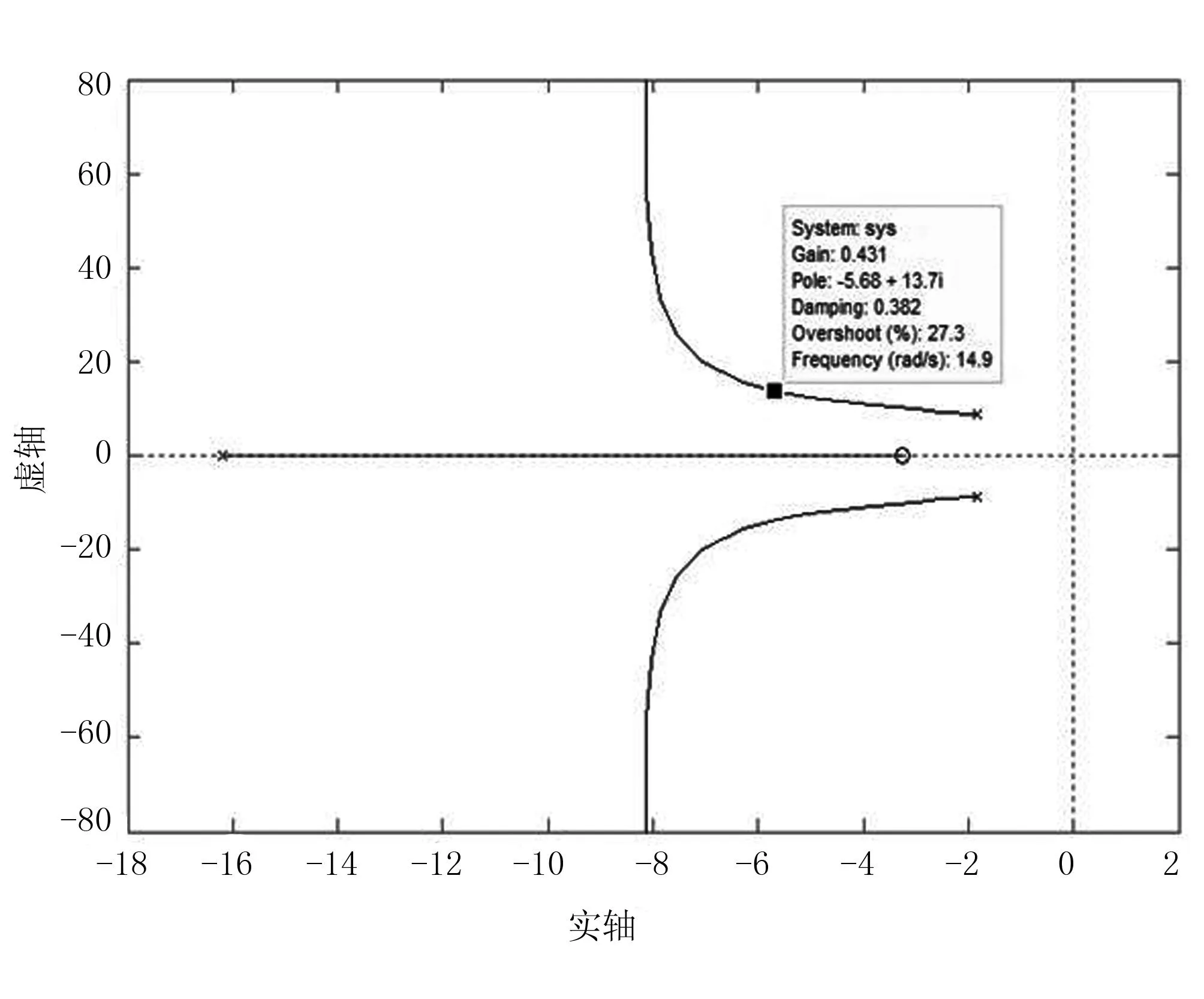
圖3 俯仰角內回路根軌跡
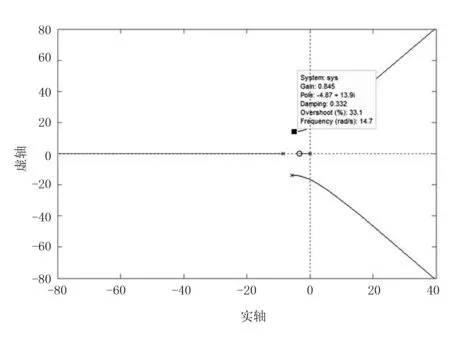
圖4 俯仰角外回路根軌跡
2.2.2高度控制回路
改變飛行高度是通過改變發動機推力和改變升降舵偏轉兩種方法來實現,但改變推力使高度改變的方法響應時間慢[16],所以本文采用以俯仰角控制回路作為內回路,以高度變化速率和高度變化為反饋進行設計,如圖5所示。通過式(9)得到高度控制系統內回路的根軌跡圖,如圖6所示。通過分析可知,確定高度控制系統內回路的增益值為1.23。
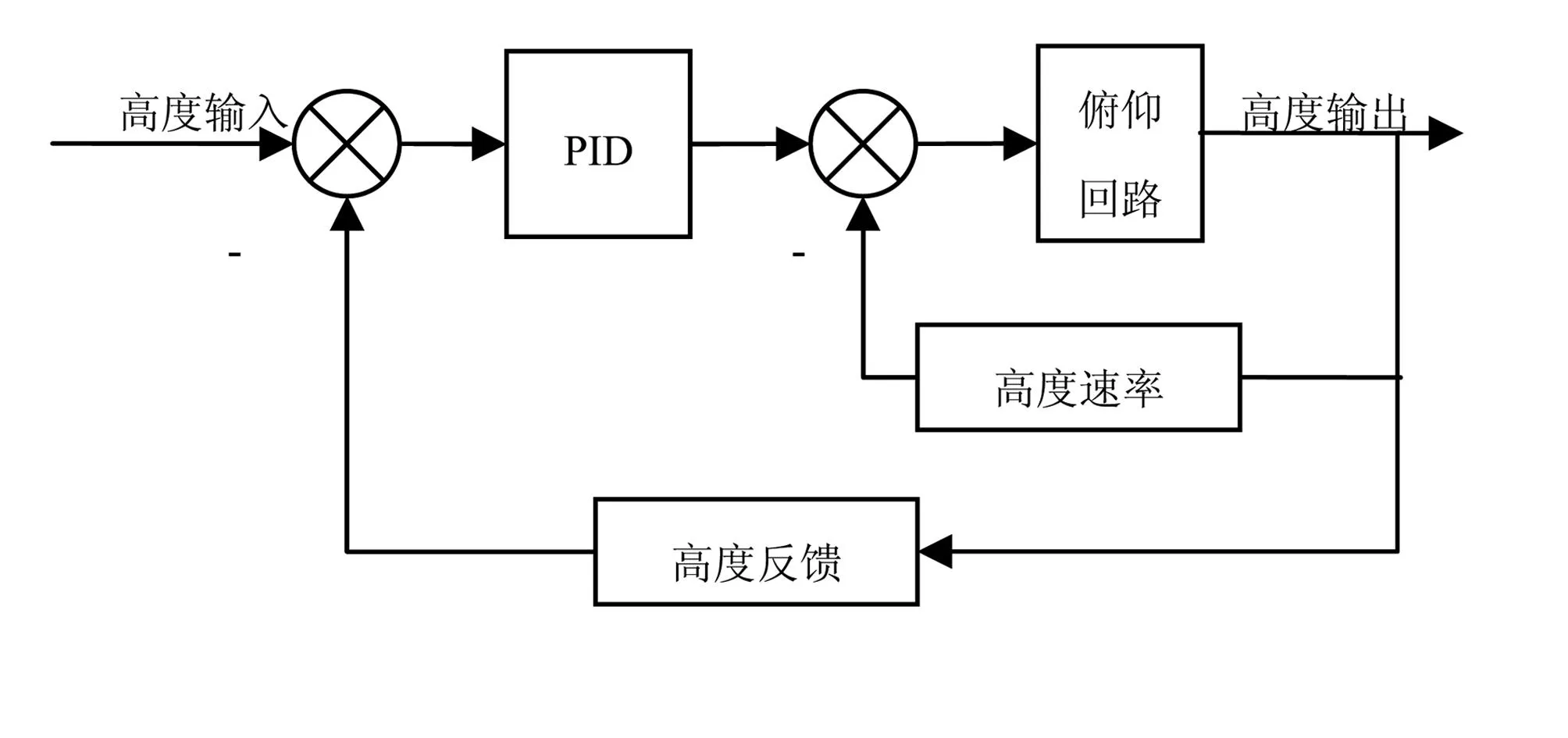
圖5 高度控制回路
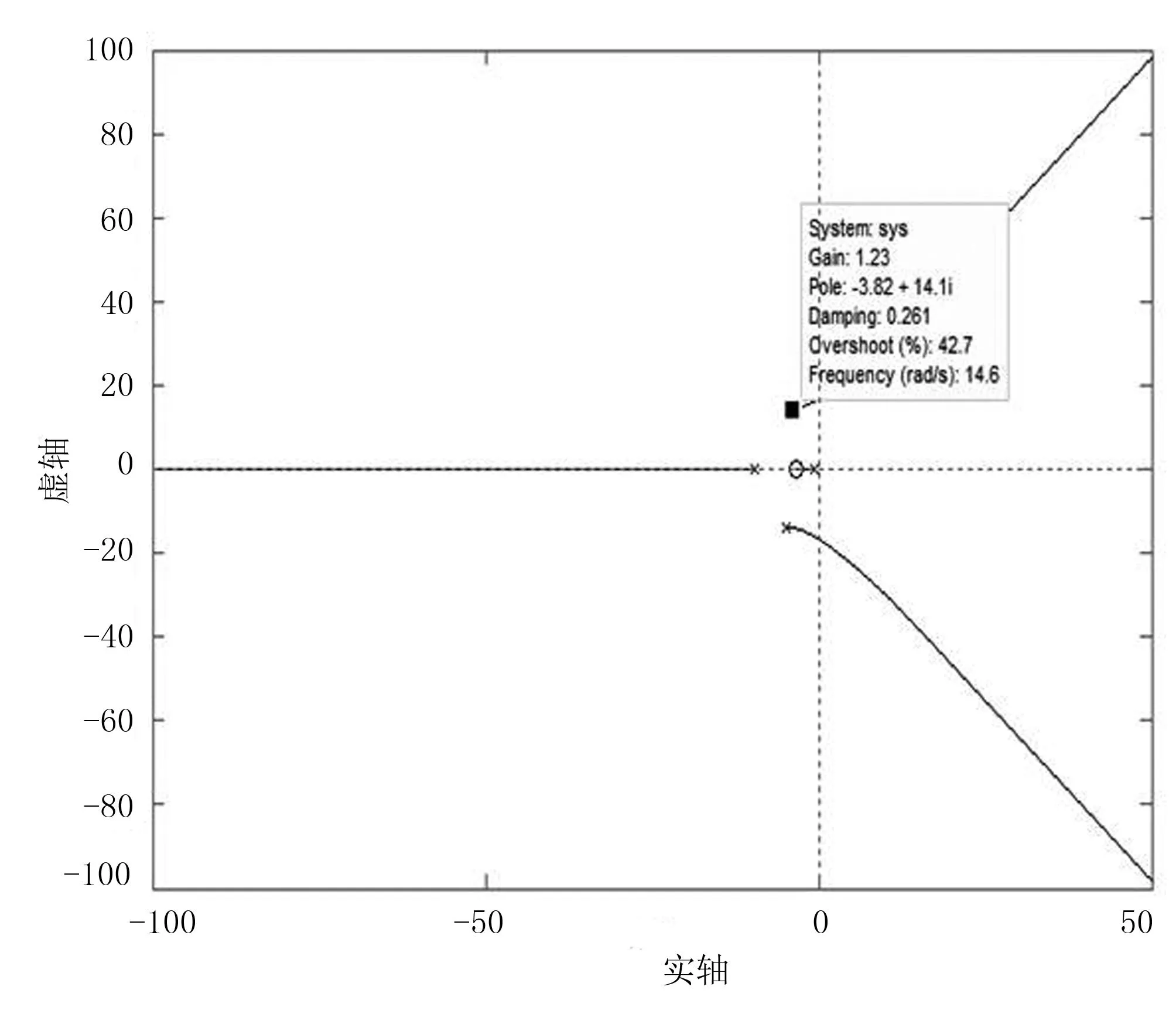
圖6 高度控制內回路根軌跡
3仿真實驗
在PID控制中,PI控制律和PID控制律在工程中常被采用,且兩種控制律都有提高系統穩定性的特點。利用兩種控制律進行仿真時,根據仿真波形比較性能差別,應用MatLab軟件建立俯仰角控制回路和高度控制回路仿真模型,如圖7、圖8所示。由上一章節確定的各回路增益值和通過整定參數得到的兩回路在兩種控制率下的階躍響應波形如圖9和圖10所示。其中,實線波形為PID控制,虛線為PI控制。
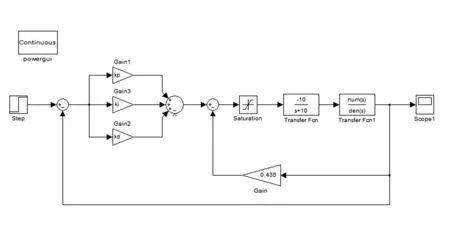
圖7 俯仰角控制回路仿真模型
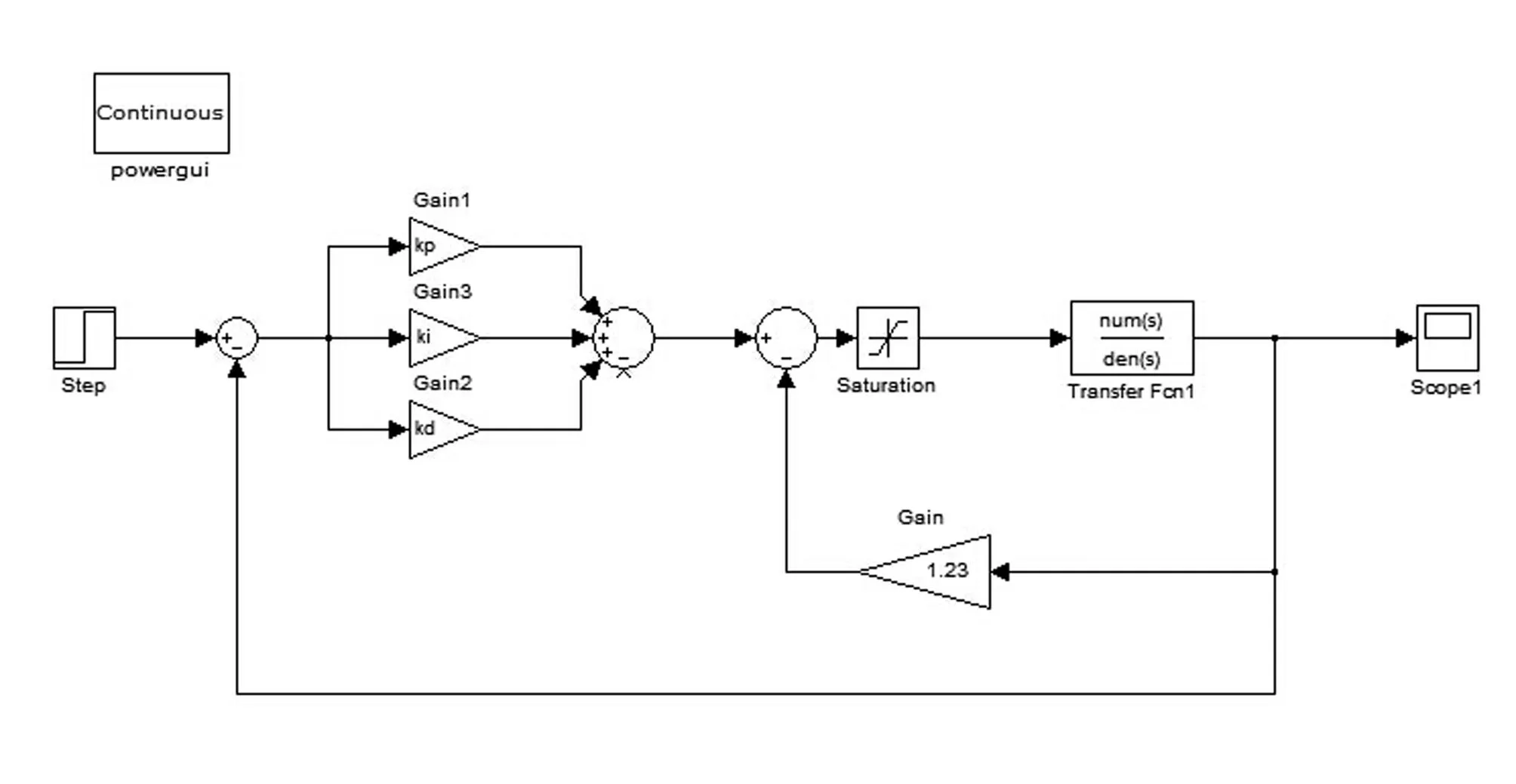
圖8 高度控制回路仿真模型
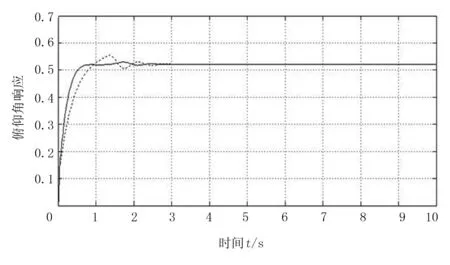
圖9 俯仰角控制階躍響應
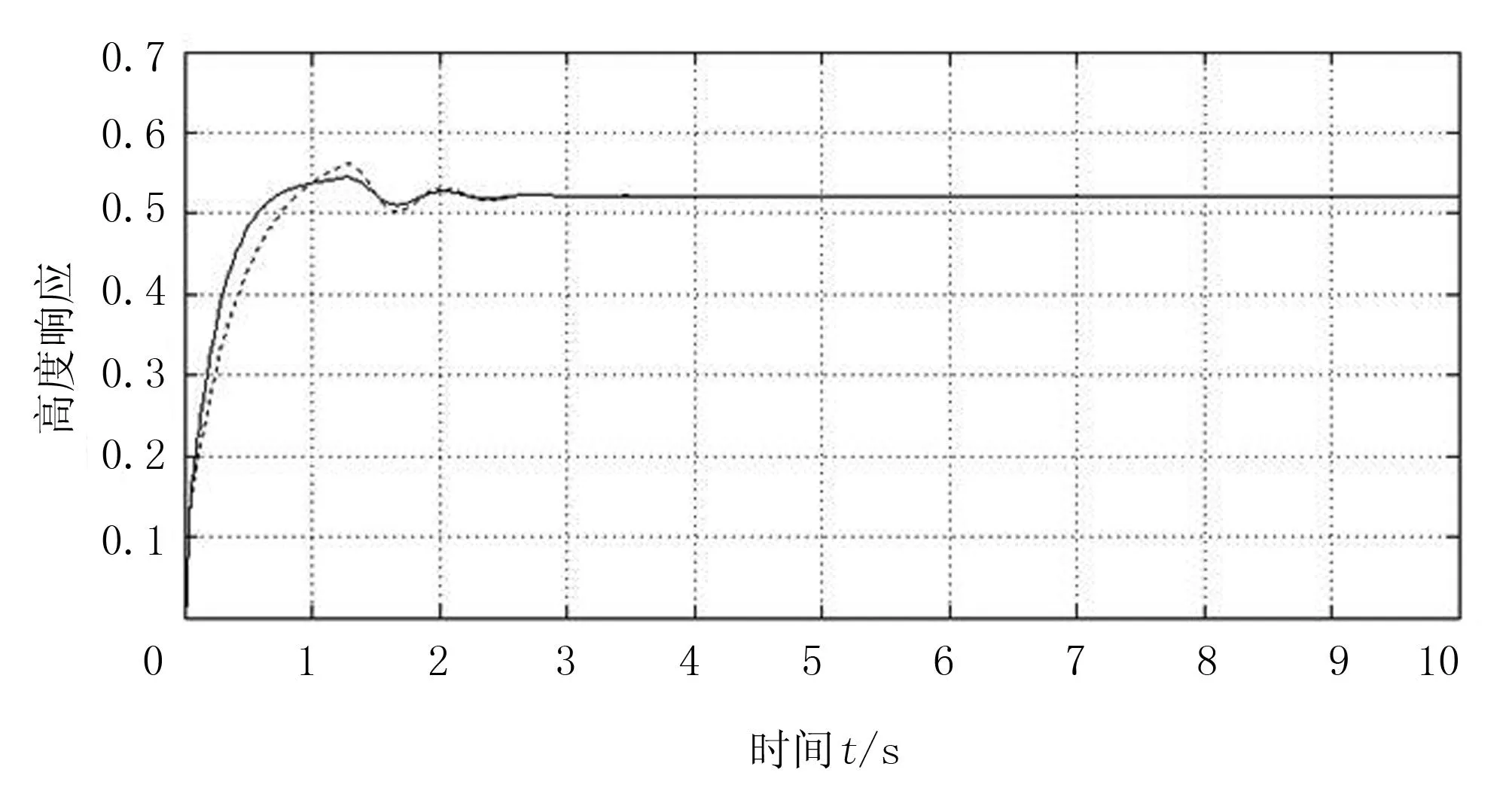
圖10 高度控制階躍響應
通過分析俯仰角控制回路和高度控制回路在兩種控制律控制下的階躍響應曲線,得到系統的性參數,如表2所示。比較系統性能參數可知:采用PI和PID控制律控制兩回路時,系統的穩態誤差均低于允許誤差5%,但穩態誤差相同;采用PI控制律控制時,系統超調量、調節時間和峰值時間均大于PID控制。綜合以上分析,采用PID控制律控制系統具有相應時間快、性能穩定、阻尼性好的優點,雖然具有一定的穩態誤差,但低于系統允許誤差,可以穩定地控制無人機的飛行姿態。
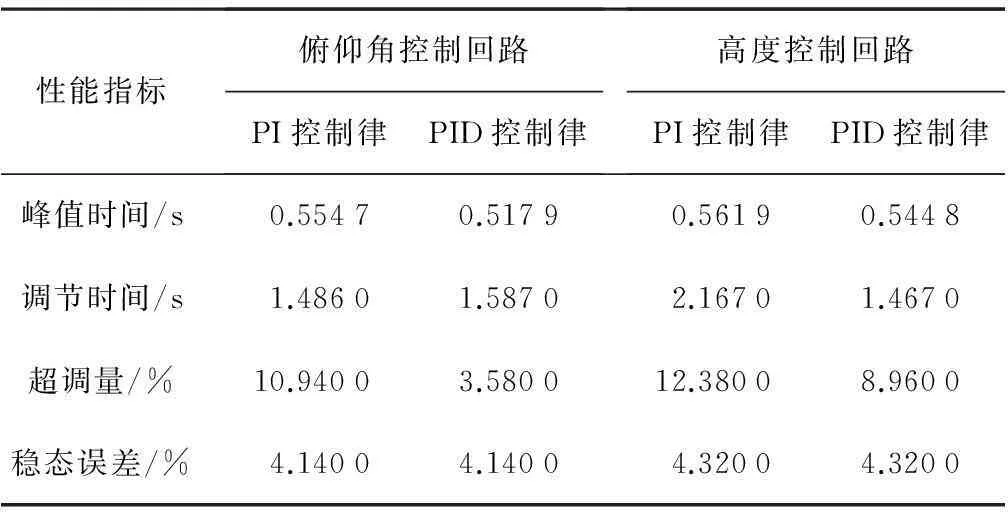
表2 系統性能參數
4結論
首先分析了農用無人機的非線性縱向運動方程,并以實際樣機參數建立了在平衡點上的縱向線性化模型,然后應用經典PID控制理論設計了縱向運動的姿態控制系統。在仿真實驗中所得到的數據均表明:利用經典PID控制理論中的PID控制器控制農用無人機的飛行姿態,具有操作簡便、性能穩定、滿足無人機作用于農業領域的技術要求的特點。相信在未來農用無人機的發展中,會有更加高效的控制思想運用于無人機的各部分控制中,使農用無人機擁有更加廣泛的實用領域和市場前景。
參考文獻:
[1]陳天華,盧思翰.基于DSP的小型農用無人機導航控制系統設計[J].農業工程學報,2012,28(21):164.
[2]梅勁松,屈薔,袁佳斌.基于特征模型的某型無人機智能PID控制器[J].南京航空航天大學學報,2006,38(4):483-486.
[3]唐勝景,宋祥,郭杰,等.基于遺傳算法的無人機模糊積分控制器設計[J].北京理工大學學報,2013,33(12):1274-1278.
[4]秦世引,陳峰,張永飛.小型無人機縱向姿態模糊自適應PID控制與仿真[J].智能系統學報,2008,3(2):121-122.
[5]胡占雙.無人機飛行姿態監測及控制[D].沈陽:沈陽航空航天大學,2012:1-25.
[6]吳森堂,費玉華.飛行控制系統[M].北京:北京航空航天大學版社,2013:8-10.
[7]李瑋.無人機PID控制及智能PID控制技術的研究[D].南京:南京理工大學,2004:1-10.
[8]劉銀春.小型無人機控制規律設計及仿真[D].長沙:中南大學,2008:1-21.
[9]Chenggong Huang,Qiongling Shao,Pengfei Jin,et al.Pitch Attitude Controller Design and Simulation for a Small Unmanned Aerial Vehicle [J].2009 International Conference on Intelligent Human-Machine Systems and Cybernetics,2009,2:58-60.
[10]李海泉.小型無人機飛行力學建模及虛擬訓練平臺的建立[D].南京:南京航空航天大學,2011:7-17.
[11]榮輝,李東,殷堂春.基于Matlab無人機數學模型仿真分析與研究[J].科學技術與工程,2008,8(6):1510-1512.
[12]張冬妍,周修理.自動控制原理[M].北京:機械工業出版社,2011:225-227.
[13]趙笑笑. 基于模糊理論和常規PID控制的模糊PID控制方法的研究[J].山東電力技術,2009(6):54-63.
[14]黃友銳,曲立國.PID控制器參數整定與實現[M].北京:北京科學出版社,2010:8-14.
[15]劉豹,唐萬生.現代控制理論[M].北京:機械工業出版社,2007:15-31.
[16]胡慶.基于STM32單片機的無人機飛行系統設計[D].南京:南京航空航天大學,2012:33-36.
Abstract ID:1003-188X(2016)10-0006-EA
Longitudinal Attitude control System Design and Simulation of Agricultural Unmanned Aerial Vehicle
Liu Chao, Zhang Changli, Wang Shuwen, Wang Runtao, Zhang Lingyi,Lv Tao, Luan Jiling, Zhou Yanan
(College of Electric and Information, Northeast Agricultural University, Harbin 150030, China)
Abstract:This Longitudinal attitude control system is designed on the basis of Classic PID control method. It’s also specific to the character of how Agricultural unmanned aerial vehicle operates and its application field.The system firstly uses Matlab to build a Longitudinal motion mathematical model at the trim point of the vehicle,which can analyze the Longitudinal motion of itself. Secondly, the system applies the Classic PID theory to the design of the Pitch and Height attitude control loop of the vehicle. The result shows that the attitude control system effects well during flight and can meet the technical requirement of Agricultural unmanned aerial vehicle.
Key words:agricultural unmanned aerial vehicle; longitudinal attitude; PID control; simulation
中圖分類號:S251
文獻標識碼:A
文章編號:1003-188X(2016)10-0006-05
作者簡介:劉超(1990-),男,哈爾濱人,碩士研究生,(E-mail)1743780584@qq.com。通訊作者:張長利(1957-),男,哈爾濱人,教授,碩士生導師,(E-mail)zhangcl@neau.edu.cn。
基金項目:國家“863計劃”項目(AA2013102303);黑龍江省博士后科研啟動基金項目(LBH-Q13022);東北農業大學科技創新基金項目(yjscx-14003);黑龍江省自然科學基金面上項目(C2015006)
收稿日期:2015-09-10
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
