微耕機耕深輔助控制系統的設計和試驗研究
2016-03-23 03:20:04何家慧聶友紅何培祥李云伍趙華慧
農機化研究 2016年3期
何家慧,康 杰,聶友紅,何培祥,李云伍,趙華慧
(西南大學 工程技術學院,重慶 400715)
?
微耕機耕深輔助控制系統的設計和試驗研究
何家慧,康杰,聶友紅,何培祥,李云伍,趙華慧
(西南大學 工程技術學院,重慶400715)
摘要:在農業生產中,耕深的穩定性是評價耕作質量的重要指標。為此,結合目前微耕機耕深不穩定的現狀,設計了一種耕深輔助控制系統,主要用于輔助控制微耕機的耕作深度,提高微耕機的耕作質量。該系統主要由耕深檢測裝置、控制裝置、執行裝置和顯示界面組成。檢測裝置用來間接檢測耕深,控制單元對檢測到的信號進行分析后控制電機轉動,從而間接控制耕深調節阻力桿的上下移動,以實現耕深輔助調節。顯示模塊用于顯示實時耕深,為操作人員提供參考。田間試驗結果表明:耕深穩定在120~130mm時的耕深穩定性變異系數為5.82%,滿足農藝要求。所提出的耕深測量方法、輔助控制執行裝置和顯示界面對微耕機設計具有一定的參考意義。
關鍵詞:微耕機;耕深;穩定性;輔助控制
0引言
微耕機在歐美地區主要用于園藝、溫室等小面積耕地機械作業。我國西南農村地區,丘陵和山區占了很大面積,由于地塊小、地勢起伏不平、農村道路狹窄,微耕機被廣泛用于其土地耕整作業。雖然微耕機提高了西南地區的農業機械化水平,但現有的微耕機在工作過程中,主要由操作者下壓機身后端的阻力棒來控制微耕機的前進速度以間接調節旋耕刀片的入土深度,這種方式完全依靠操作者的經驗,作業耕深很不穩定,作業質量往往達不到農藝要求。為此,本文提出了一種微耕機耕深輔助控制系統,在微耕機上安裝該系統,可以實現微耕機的耕深輔助調節,提高微耕機的耕作質量。
1控制系統整體設計方案
該系統主要分為耕深檢測裝置、控制裝置、執行裝置和顯示界面4個部分(如圖1所示),蓄電池為整個系統提供電能,支架用于該系統的安裝并將該系統與微耕機相連接。耕深檢測裝置用于檢測微耕機的實時耕深信號并將該信號發送給控制裝置;控制單元在對應的幾何關系基礎上,通過內部算法計算得到此時的耕作深度,然后通過控制執行裝置來控制阻力棒插入土壤的深度以間接控制微耕機的前進速度,使微耕機的耕深達到設定的耕深范圍;同時,顯示界面顯示實時耕深值,為操作者下一步的操作提供參考。
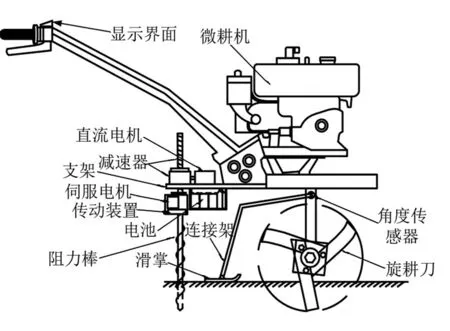
圖1 整體安裝示意圖
1.1耕深檢測裝置及其原理
目前,國內對拖拉機作業耕深進行實時測量的方式主要有凸輪軸式和電位計式兩種,國內有關于采用傾角傳感器或者電感式位移傳感器對拖拉機作業耕深進行連續測量[1-2]的文獻;國外還有利用超聲波傳感器實時檢測拖拉機的作業耕深[3]的文獻。借鑒拖拉機的耕深檢測方式,本文采用和電位計原理類似的角度傳感器來間接檢測微耕機的實時耕深。這種方式與其他耕深測量方式相比,結構簡單、安裝和維護方便、電路集成度較高、價格低廉。首先由安裝在微耕機上的耕深檢測裝置與微耕機的幾何關系推導出來耕深與角度傳感器轉動角度的關系式,然后由角度傳感器特性得到轉角與輸出電壓的關系式。根據這兩個關系式,就能從傳感器檢測電壓算出微耕機的耕深值。
1.1.1幾何關系
如圖1所示,耕深檢測裝置由1個滑掌、1個連接架和角度傳感器組成,連接架的一端與角度傳感器的轉動軸固定連接,可實現±45°的轉動,另外一端鉸接于與地面接觸的滑掌上。
當旋耕刀片切入土壤后,由于耕深的變化,連接架ABC將隨著與角度傳感器轉動軸的固定連接點C一起轉動,滑掌也被連接架驅動在土地表面前后滑動, 如圖2所示。假設土壤表面是水平面,并且滑掌在作業過程中與地面接觸良好,則微耕機耕作深度d為
(1)
其中,lPC是連接架與微耕機的固定連接點C到旋耕刀尖P之間的垂直距離,lAC是固定連接點C到滑掌與連接架的鉸接點A之間的長度,α是連接架的BC和AC之間的夾角,β是連接架BC與垂線PC之間的夾角。
先測出初始即耕深為0時的α角度值,然后通過角度傳感器轉動軸在作業過程中轉過的角度可以算出此時的α角度值。角度傳感器轉動軸的轉角可以用與其有線性關系的輸出電壓計算得到。由此可知,只要采集到角度傳感器的輸出電壓就可以通過上述關系計算得到微耕機的耕作深度。
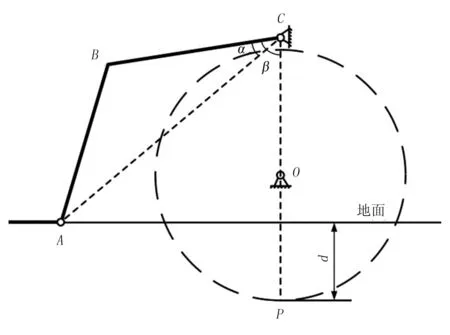
圖2 微耕機耕深檢測原理圖
1.1.2系統標定
為了提高程序的效率和測量精確度,在實現電控自動化中,并不針對參數變化的關系式進行編程,而是采用系統標定的方法得到角度傳感器檢測電壓值與實際耕深的關系。若有不同的安裝形式以及部件尺寸的變化就應當對系統進行重新標定,獲得新的運算關系式。
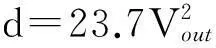
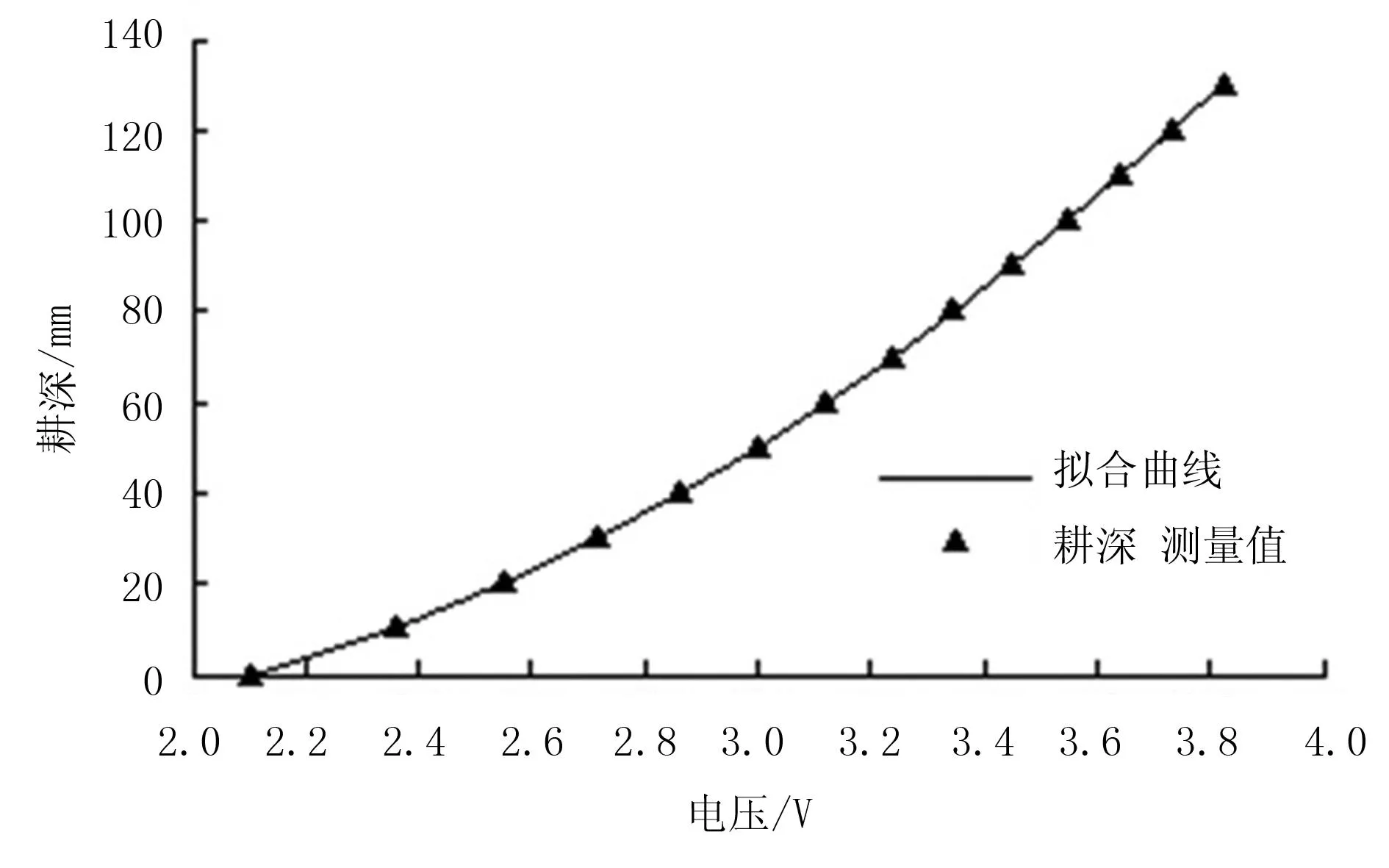
圖3 角度傳感器標定曲線
1.2控制裝置的設計
控制裝置主要由PIC16F877微控制器、TA8483電機驅動芯片及其外圍電路組成,主要用于設定耕作深度、采集角度傳感器輸出電壓信號并通過內部算法得到實時耕深值、將計算得到的耕深值信號發送給顯示界面顯示和控制電機的轉動。
圖4是電機驅動電路圖。引腳M1和M2決定電機的轉動方式:當M1 = 0,M2 = 0時,電機按整步方式運轉。引腳CW/CWW用于控制電機轉動方向,通過控制CK1時鐘輸入的頻率,可以控制電機的轉動速率。引腳NFA和NFB用來控制電機的輸入電流,電機按二相雙極性使用[5]。
1.3執行裝置的設計
如圖1所示,該系統的機械執行裝置主要由電機、減速器和耕深調節阻力棒組成。該裝置結構簡單,傳動效率高,響應速度較快。減速器的輸入軸與直流電機相連接,其輸出軸與阻力棒相連接并可以沿著其軸線方向做往復運動。當直流電機和伺服電機轉動時,經過減速后的耕深調節阻力棒轉入或轉出土壤,從而對微耕機產生不同的前進阻力以調節微耕機的前進速度,最終使微耕機的作業耕深發生改變。
1.4顯示界面的設計
顯示界面主要由4個LED數碼顯示管及其外圍電路組成,如圖5所示。其用于實時顯示微耕機的耕作深度,結合實際的工作狀況,為操作者判斷耕深輔助控制系統工作是否正常,以及為下一步的操作提供參考。本文中顯示界面采用動態顯示的方式。相對于靜態顯示,動態顯示所使用的元件少、引線少、電路簡單,只要通過PIC16F877控制一定的刷新頻率[6],就能實時穩定地顯示微耕機的耕作深度。
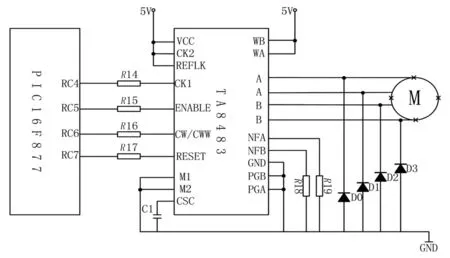
圖4 電機驅動電路圖
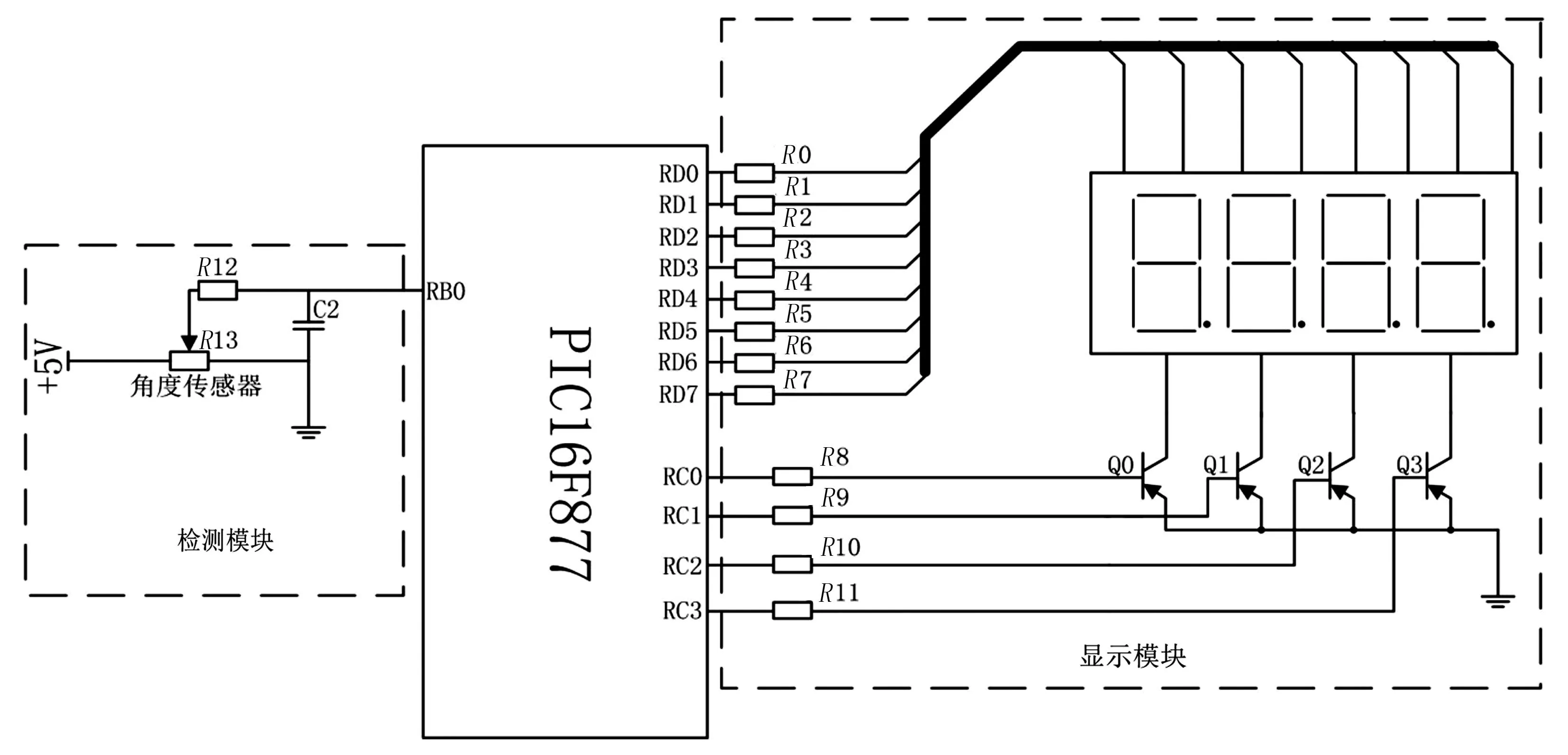
圖5 顯示界面電路圖
2耕深輔助控制
微耕機耕深輔助控制系統的被控制量為旋耕刀片的入土深度;角度傳感器檢測出與滑掌鏈接的連接架的角度變化,換算后得到耕深,并提供反饋信號。系統控制的目的是使微耕機的耕深保持在系統設定的耕深范圍內,控制原理如圖6所示。控制器在比較耕深設定值和反饋值后,若反饋值超出了設定耕深值范圍,則輸出控制驅動直流電機正轉或反轉,由耕深調節阻力棒不同的入土深度即不同的阻力大小調節微耕機的作業速度,以維持耕深均勻。為平衡滑掌與土壤表面不完全接觸時的測量偏差,角度傳感器測量值要經過加權平均處理。
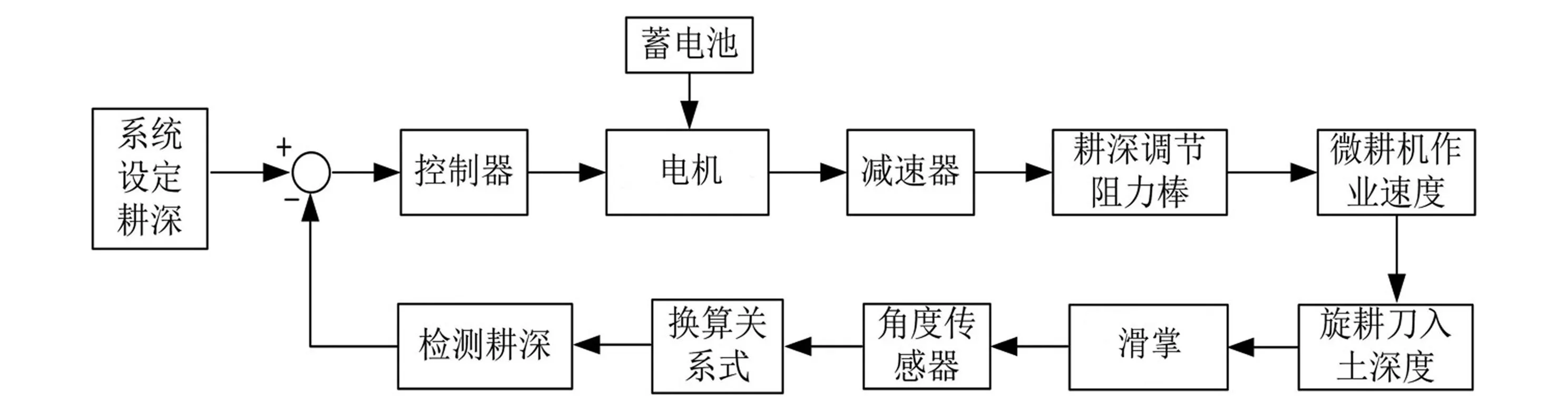
圖6 控制系統流程圖
3田間試驗及結果分析
微耕機耕深輔助控制效果通過耕深穩定性變異系數表示。該系數指的是耕地過程中,沿耕作方向,作業機具對規定耕深變化的程度[7],其算法如式(2)所示。在該試驗中,試驗對象為鑫源SR1Z-100型微耕機及其配套的旋耕刀片。微耕機采用慢擋位進行試驗作業,試驗地塊為重慶西南大學后山試驗田,其最大起伏度在50~70mm左右。采用耕深輔助控制系統控制方法與傳統的手動操作耕深控制方法的實測耕深數據的對比曲線如圖7所示。其中,實際耕深是通過對微耕機的作業線路每隔0.5m進行多點人工測量得到的。兩種耕深控制方法的結果對比如表1所示。
(2)
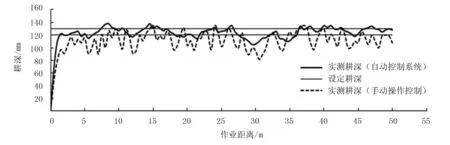
圖7 田間試驗耕深測量實測對比曲線
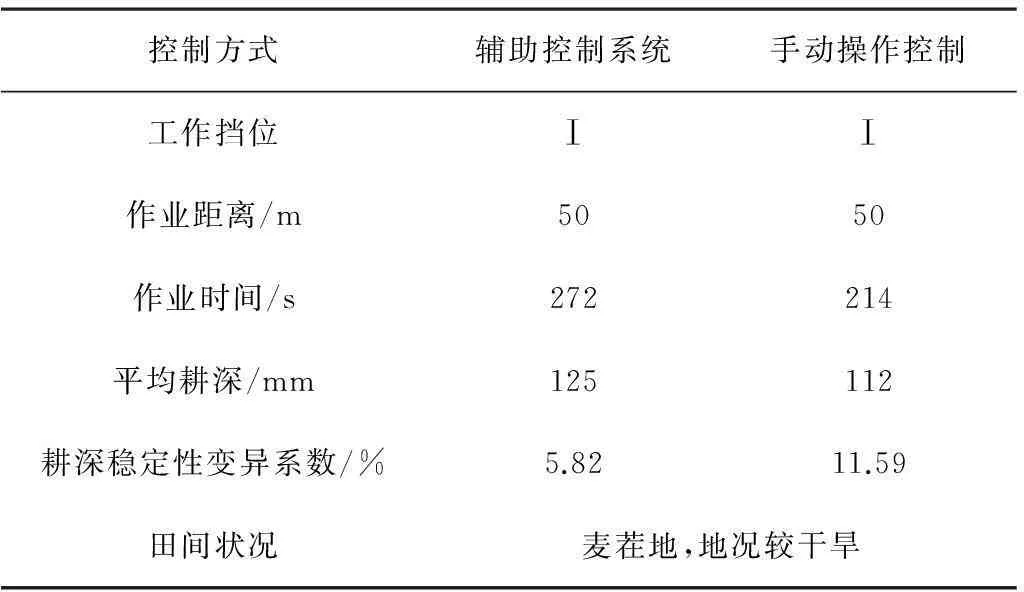
控制方式輔助控制系統手動操作控制工作擋位ⅠⅠ作業距離/m5050作業時間/s272214平均耕深/mm125112耕深穩定性變異系數/%5.8211.59田間狀況麥茬地,地況較干旱
圖7所示曲線表明:盡管由于地形變化,在28~37m的作業距離區間耕深較淺且波動起伏較大,但是總體上耕深輔助控制系統比傳統的手動操作對微耕機耕深控制更穩定,耕深波動起伏也更小。由表1可知:通過安裝耕深輔助控制系統,雖然作業時間長于傳統的手動操作,但是其平均作業耕深增加了13mm,作業質量也得到了提高。在穩定耕作階段,設定耕深為120~130mm,采用輔助控制系統的微耕機實測耕深最大值為138mm,最小值為105mm,其耕深穩定性變異系數為5.82%,不僅小于手動操作的11.59%,同時也滿足了該系數低于10%的農藝要求[7]。
4結論
提出了一種基于角度傳感器間接測量耕深并實現耕深輔助控制的系統,利用電子控制的方式來完成微耕機的耕深輔助控制,實時性較高;作為一套獨立的系統安裝在微耕機上,基本不改變微耕機原有的機械結構,通用性較好。田間試驗結果表明:安裝了該系統的微耕機的耕深波動范圍得到了限制,作業質量得到了提高。
由于耕深檢測裝置的滑掌與地面直接接觸,起伏的地面會對耕深檢測造成偏差。在地塊起伏變化較大的區域,檢測角度相比平坦的地塊會偏大或偏小,造成實際耕深比需要控制的耕深偏小或偏大,影響耕深的穩定性。因此,更合適的耕深檢測方法需要后續進一步探究和驗證。
參考文獻:
[1]謝斌,李皓,朱忠祥,等.基于傾角傳感器的拖拉機懸掛機組耕深自動測量方法[J].農業工程學報,2013(4):15-21.
[2]李玲,李江全,李新榮,等. 耕深電子測試系統的設計與試驗研究[J].石河子大學學報:自然科學版,2001(3):246-248.
[3]Mouazen A M, Anthonis J, Saeys W, et al.An automatic depth control system for online measurement of spatial variation in soil compaction, Part 1: Sensor design for measurement of frame height variation from soil surface[J].Biosystems engineering, 2004, 89(2): 139-150.
[4]李國文,陳鵬.旋耕機耕深自動測量記錄裝置[J].江蘇工學院學報,1985(1):54-62.
[5]Toshiba Semiconductor.[EB/OL].[2004-12-30].The TA8483 datasheet http://pdf1.alldatasheet.com/datasheet-pdf/view/31523/TOSHIBA/TA8483.html.
[6]李學海.PIC單片機實用教程[M].北京:北京航空航天大學出版社,2007:34-236.
[7]DB37-T 283-2000,農業機械作業質量:機械耕整地[S].
Design and Research on a System of Auxiliary Depth-control System for Micro-tiller
He Jiahui, Kang Jie, Nie Youhong, He Peixiang,Li Yunwu, Zhao Huahui
(School of Engineering and Technology, Southwest University, Chongqing 400715, China)
Abstract:Stability of tillage depth is important to agricultural tillage. Combining the current situation that tillage depth of the micro-farming machine is enormously unstable, presents an automatic depth control system applied in the micro-farming machine. The main objective of the system is to stabilize tillage depth of the micro-farming machine. The system has four parts: the detector, the controller, the executor and the display interface. The detector is used to detect tillage depth indirectly. Then the controller controls rotation of the step motor, regulating the depth of resistance rod into the soil for controlling running speed of the micro-farming machine, until tillage depth achieves the desired depth. Moreover, the display interface shows real-time tillage depth to provide the running condition of the system for the operator. The field tests showed that the system improved the stability of tillage depth because when cultivated tillage depth range is 120~130mm, variability coefficient of depth stability is 5.82%, meeting the agronomic requirement. That could prove the significance of the system in future micro-farming machine design.
Key words:micro-tiller; tillage depth; stability; complement control
文章編號:1003-188X(2016)03-0119-05
中圖分類號:S222.3
文獻標識碼:A
作者簡介:何家慧(1987-),女,湖北潛江人,碩士研究生,(E-mail) 602748337@qq.com。通訊作者:何培祥(1965-),男,四川廣安人,教授,碩士生導師,(E-mail) hpx65@yahoo.com。
基金項目:國家自然科學基金項目(51475385);重慶市科委應用開發計劃項目(cstc2014yykfA80001);中央高校基本業務費專項(XDJK2014031);重慶市研究生科研創新項目(CYS14061)
收稿日期:2015-03-11