輪距可調的電驅式小型半喂入水稻聯合收割機設計
2016-03-23 03:20:04黃年月肖龍祥潘遠香
農機化研究 2016年3期
尹 健,陳 蘭,黃年月,肖龍祥,潘遠香
(1.貴州大學 機械學院, 貴陽 550025;2.貴航飛機有限責任公司,貴州 安順 561000)
?
輪距可調的電驅式小型半喂入水稻聯合收割機設計
尹健1,陳蘭2,黃年月2,肖龍祥1,潘遠香1
(1.貴州大學 機械學院, 貴陽550025;2.貴航飛機有限責任公司,貴州 安順561000)
摘要:山地丘陵地區要實現水稻收獲的機械化,必須解決現有機型機器重、體積大、轉運難的問題。本文從兩個方面來解決這些矛盾,輪距可調解決了田埂上行走問題,電驅左右輪的方式解決了轉向靈活問題,并省去了復雜的差速及傳動系統。同時,給出了主要部件的結構設計和計算,設計了一種控制電路。
關鍵詞:水稻聯合收割機;半喂入;電驅式;可調輪距
0引言
我國南方是主要糧食作物水稻的主產區,主要為山地丘陵地貌。其運輸條件差,大中型收割機械無法到田間作業。因此,水稻聯合收割機的小型化、輕量化是我國南方山區、丘陵地區實現水稻收獲機械化的關鍵技術。
對水稻聯合收割機的小型化、輕量化有較多研究。高玉根[1]等提出了一款割前脫粒的機型,割幅600mm收兩行水稻但機型很長。時勝德等[2]提出了一種臥式割臺的半喂入機型,明顯降低了莖稈輸送距離,割幅700mm,由于脫粒滾筒與割臺并排放置故寬度很大。王峰等[3]采用了“U型”行走路線的半喂入機型,即莖稈切割后橫向輸送,轉180°彎后進入脫粒夾持鏈繼續橫向輸送脫粒,該機型割幅600mm,其長度和寬度介于上述兩款機型之間。
在驅動方式上,上述機型均采用汽油發動機,通過機械傳動將動力引到各處。這樣處理的弊端是:傳動系統比較復雜,當遇到需要變換位置及角度時更甚;特別地,各部分的轉速受到既定傳動系統的約束而成固定的速比關系,對收獲不同成熟度及倒伏度的水稻而言,無法通過控制油門達到調整其中某個環節速度變化之目標。近年來,電動汽車的發展為水稻聯合收割機的驅動提供了新思路。嚴萍華[4]研究了一款純電動垃圾清掃車,通過充電為電動機提供動力。宋珂[5]等研究了增程式電動汽車,在傳統的純電動汽車上增加了一套能發電且給車載動力蓄電池充電的輔助裝置。
上述幾款機械式半喂入機型由于長寬方面尺寸較大,在道路崎嶇、田塊狹窄的山地稻田使用,還會遇到許多困難;純電動或帶有增程器的驅動模式,因必須攜帶質量較大的動力蓄電池也不適合本項目提出的山地半喂入機型。
質量輕、體積小、轉向靈活、轉運方便同時具有一定生產率的機型,是真正適合山地丘陵地區使用的機型。在此總體目標下,本文提出了一種可調輪距的、直接電驅式的小型半喂入水稻聯合收割機。
1總體結構及輪距調節機構
水稻聯合收割機的長、寬、高及生產率之間是互相牽制的。仔細分析不難發現:長、寬、高之間的關系就是一個此消彼長的關系;不過,采取適當的措施并仔細布置,是可以在長、寬、高之間很好協調的。作為一款山地半喂入水稻聯合收割機,本項目設計的4LB-0.6半喂入水稻聯合收割機在這方面進行了有益的嘗試。
1.1整機結構
總體結構如圖1所示。
工作時,扶禾機構將倒伏的禾稈扶起,交給夾禾機構;禾稈在夾持狀態下完成切割,然后進入脫粒夾持機構;禾稈在脫粒夾持鏈的帶動下進入脫粒滾筒完成脫粒并將禾稈拋于機器后方。
為適應不同高度禾稈的抓取,設計夾禾咬入點的高度可調,通過夾禾機構的安裝底板繞其尾部轉動來調整,本機夾持高度設定為420~750mm;采用夾持后切割方式,扶起鏈的前伸量設計成可調。若該距離太大,則收獲短莖稈時,扶起后的莖稈有可能會再次傾倒而導致夾持不好;該距離太小,則收獲長莖稈時會出現尚未扶起就開始夾持也會導致夾持不好。為調節不同的喂入深度,脫粒夾持機構的壓緊點為三段可調,即通過調節螺母抬起或放下壓板實現壓緊位置的變換。
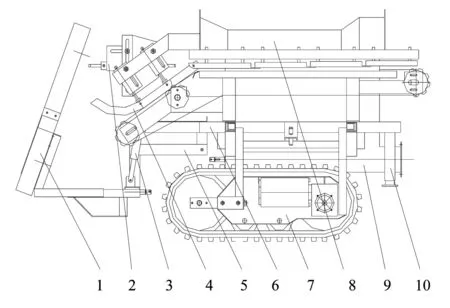
1.扶禾機構 2.夾禾機構 3.電動推桿 4.脫粒夾持機構 5.轉臂
機器在轉運過程中,利用電動推桿先將轉臂抬起,則扶禾機構和割刀均被抬高,便于通過障礙。當需要調整履帶輪距時,先將機器尾部的伸縮支架放下,然后伸長電動推桿,使轉臂向下轉動,從而將整機抬起,履帶離開地面以便于調整。輪距設計成可調,便于機器在田埂等狹窄地帶上通行。
扶禾鏈及履帶均采用減速電機驅動,其電能來源于汽油發電機增程器。扶禾鏈用電機驅動,傳動系統十分簡單,且便于調速,以適應不同倒伏狀態及不同成熟度的水稻收獲[6]。行走部分設計成電機驅動,避免了使用差速器;理論上只要控制電機的正反轉, 便可實現原地轉動,轉彎半徑小,便于在狹小田塊上通行。
1.2履帶輪距調節機構
調節機構如圖2所示。左右履帶分別安裝在兩個獨立的滑動導軌上。當需要調整輪距時,先將履帶抬離地面,然后將緊定螺栓松開,通過手輪轉動絲桿使立柱聯接梁在斜線方向移動,從而實現輪距的調整。固定導軌斜置,避免了在縮小輪距時,滑動導軌與輸谷攪龍外殼發生干涉,同時又不至于使機器重心高度太大。
2履帶調整機構設計
2.1輪距調整量
履帶輪距調節的各部分尺寸如圖3所示。
1)最大最小輪距為
Lmax=2[(l1+l2)cos30°+l3]-2(l4+l5)
Lmin=Lmax-2+l2cos30°
式中Lmax、Lmin—最大、最小輪距(mm);
l1—滑動導軌長度(mm),l1=165;
l2—滑動導軌行程(mm),l2=135;
l3—滑動導軌在最下位時與中心距離(mm),l3=52;
l4—履帶寬(mm),l4=120;
l5—滑動導軌在最上位時履帶與邊緣距離(mm),l5=42。
故Lmax=305mm,Lmin=72mm。
2)高度變化。由于采用斜置導軌的方式,因而在調整前后高度變化不應過大,以免引起操作上的困難及重心不穩。縮小輪距后重心抬高量為
H=l2sin30°=67mm
本機總體高度850mm,重心高度590mm。調寬時導致高度的變化很小,不會帶來問題。
3)適應田埂寬。將履帶輪距縮小到最窄,則履帶邊緣尺寸即為適應田埂寬度,有
B=Lmin+2l4=312mm
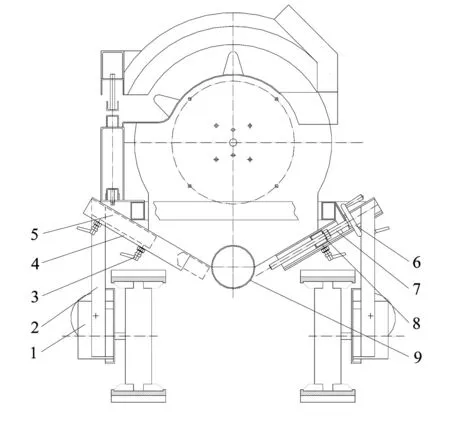
1.驅動組件 2.立柱 3.緊定螺栓 4.固定導軌 5滑動導軌
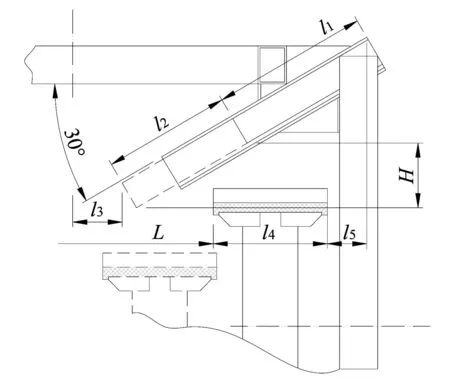
圖3 輪距調節
2.2電動推桿設計
電動推桿作為一種傳力機構,在使用上較液壓缸更為簡單。目前,電動推桿的標準行程從100~400mm,級差為50mm,最大推力可達6 000N,空載速度為5~35mm/s。
1)行程確定。
安裝推桿的凸耳螺栓孔中心距:轉臂處于最上位時為140mm、處于最下位時270mm,行程130mm,選標準行程為150mm規格。
2)推力確定。
圖4為電動推桿將轉臂提起時,要克服裝在轉臂上所有部分的質量;將轉臂放下時,要克服整機質量。
已知G1=280N,G2=970N,其余尺寸如圖4所示。
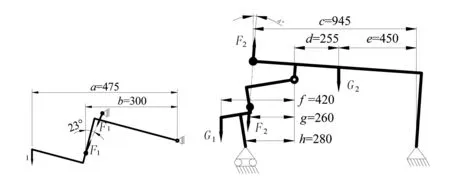
(a) 抬起轉臂 (b) 抬起機器
經計算,抬起轉臂時,電動推桿拉力F1=481N;放下轉臂并抬起整機時,電動推桿推力F2=371N。
據此,電動推桿選擇行程150mm、推力500N的標準推桿。
3履帶驅動底盤的設計
3.1牽引功率
本機主要技術參數如表1所示。
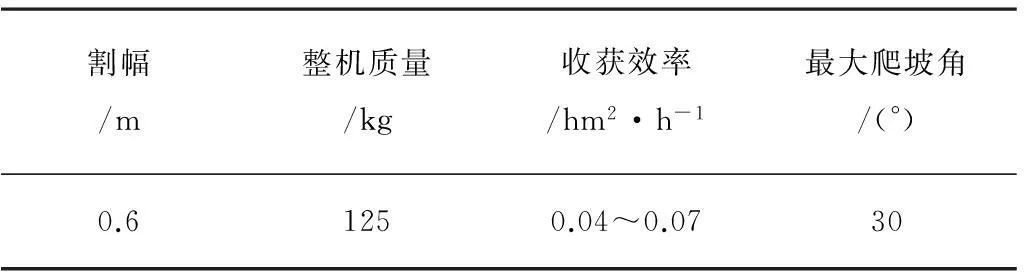
表1 收割機主要技術參數
3.1.1收割機速度
1)作業速度為
vm1=S/3600b=0.185~0.32m/s
式中vm1—收割機作業速度(m/s);
S—作業效率(m2/h),本機S=400~700;
b—收割機割幅(m)。
2)收割機轉運行駛速度為
本機設定為vm2=0.6m/s。
3.1.2牽引力
本機的移動速度較低,空氣阻力可以忽略不計,因而只需考慮兩種工況下的牽引力。
1)上坡行駛工況,有
F1=fcosα+Gsinα=787.4N
式中F1—上坡行駛牽引力(N);
G—收割機質量(N);
f—履帶行走機構的滾動阻力系數。
不同路面下的滾動阻力如表2所示[7]。按最大值0.15計算。

表2 不同土質路面的滾動阻力系數
2)水平行駛工況,有
F2=GF=187N
式中F2—水平行駛牽引力(N)。
3.1.3牽引功率
P=Fvm/1000
式中P—履帶機構的牽引功率(kW)。
1) 以作業速度上坡行駛,有
P1=F1vm1/1000=0.251kW
2)以最高車速水平行駛,有
P2=F2vm2/1000=0.112kW
故牽引功率P=max{P1,P2}=0.251kW。
3.2履帶選型
本機要求整機質量輕,因此選用橡膠履帶,履帶花紋選用一字型。
1)履帶節距。可按下式估算[9],有

2)驅動輪齒數[10]為
Z′=60×1000vm/nt=12.8
式中Z′—估算的驅動輪齒數;
n—與vm對應的驅動輪軸轉速(r/min),作業速度對應的轉速取為n=30。
實際采用的齒數Z>Z′,取偶數且便于加工時分度,故取Z=16。
3)驅動輪節圓直徑[10]為
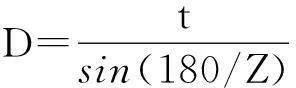
式中D—驅動輪節圓直徑(mm);
δ—履帶鋼絲層中心至履帶內滾動面距離(mm),取δ=10mm。
4)履帶長度。根據整機的設計要求,履帶主從動輪中心距為L0=485mm,水稻聯合收割機的履帶長寬比λ=L0/b,一般λ=3~4[11],選取b=120mm。
履帶周長:L=2L0+D=1205mm。
4電路設計
相對傳統的純機械式驅動,電驅式水稻聯合收割機的提出,主要是從轉向靈活、傳統系統簡單的角度出發,這與電動汽車主要追求環保無污染不盡相同。
所謂電動汽車,是指由車載儲能元件提供能源,用電動機驅動車輛行駛的汽車,可分為純電動汽車、混合動力汽車和燃料電池汽車。為彌補純電動汽車續航里程不足的問題,歐美發達國家首先提出了增程式純電動汽車模式[5],其基礎是純電動汽車,但增加了一套能夠發電且能給蓄電池充電的裝置即增程器。當蓄電池電能不足時,增程器工作,給蓄電池充電或直接驅動電機。
本項目設計的半喂入機型,主要追求質量小,因而采用了將增程器發出的電能直接驅動電機的工作方式。增程器發出的電經處理后為24V直流電。
4.1電機選擇
1)驅動電機功率為
Pm=λP/η1η2=0.48kW
式中λ—過載系數[5],取λ=1.2;
P—牽引功率;
η1—履帶的傳動效率[8],取η1=0.90;
η2—減速器的傳動效率, 取單頭蝸桿傳動η2=0.7[12]。
故每個電機功率為0.24kW,該功率值能滿足低速上坡及高速行駛的要求。
2)驅動電機轉矩為
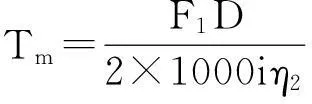
式中i—蝸桿減速器傳動比,本機i=10。
故每個電機轉矩6.6N·m,該值能滿足最大上坡要求。因此,電機選用額定電壓為24V,額定功率為0.25kW,轉矩為6.6N·m的直流電機。
4.2電機調速
實際收割作業時,對扶禾鏈及履帶驅動電機都需要調速。扶禾鏈的速度在0.7~0.9m/s,以適應不同倒伏狀態、不同成熟度的水稻收獲;履帶的行駛速度在0.3~0.6m/s之間,以適應作業及轉運的需求。
當前直流電機最好的調速方式即脈寬調制,即PWM。采用該種方式控制電機轉速有兩優點:
1)主要是通過改變輸出方波的占空比,使得負載上的平均接通時間從0~100%變化,以達到調整負載速度的目的。其好處是電源的能量能得到充分利用,電路的效率高;而采用常見的電阻降壓調速時,部分消耗在電阻的壓降及熱耗上。
2)采用PWM方式可以使負載在工作時得到滿電源電壓,有利于克服電機內在的線圈電阻而使電機產生更大的力矩。
選用的調速器參數如下:
輸入電壓:12~40VDC
額定電流/A:8~20
負載功率/W:0~400
頻率/kHZ:13
脈沖調速范圍/%:10~100
4.3控制電路
本機的控制電路示意圖如圖5所示。其采用繼電器控制履帶電機的行走和轉向,避免過大電流直接進入開關造成觸點燒壞。
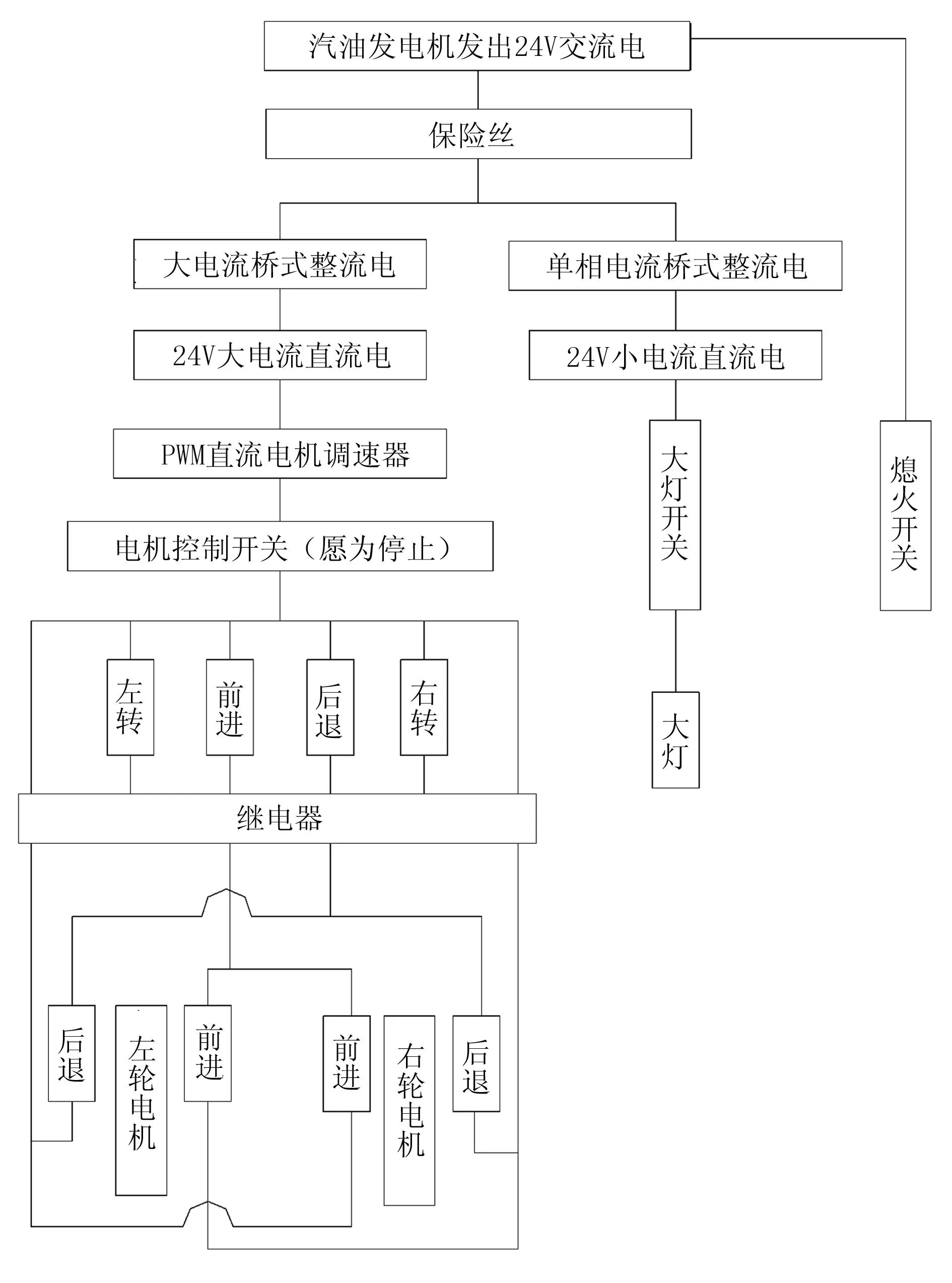
圖5 控制電路示意圖
5結論
本文設計的半喂入水稻聯合收割機,采用輪距可調技術,解決了田埂上行走問題,可在310mm寬度的田埂上行駛;采用發電機直接驅動電機的方式驅動,左右電機均為24V直流電機,額定功率0.25kW;電機驅動左右輪的方式解決了轉向靈活問題,并省去了復雜的差速及傳動系統;機器質量控制在125kg以下。本機適用于山區、丘陵地區使用,田間試驗即將開展。
參考文獻:
[1]高玉根,汪遵元,郭超,等.割前脫粒聯合收割機中縱置式脫粒部件的研究[J].農業機械學報,1997,28(3):35-38.
[2]時勝德,唐賓,蔡敢為.4LB-0.7小型半喂入水稻聯合收割機的設計[J].農業機械學報,2006,37(6):165-167.
[3]王峰,尹健.小型半喂入水稻聯合收割機設計研究[J].貴州科學,2013,31(5):39-42.
[4]嚴萍華.電動清掃車的總體設計以及動力系統的研究[D].南京:南京理工大學,2012.
[5]宋珂,章桐.增程式純電驅動汽車動力系統研究[J].汽車技術,2011(6):14-18.
[6]耿端陽,張道林,王相友,等.新編農業機械學[M].北京:國防工業出版社,2011.
[7]馬旭.高等農業機械學[M].長春:吉林大學出版社,2006.
[8]周曼川,彭福人.路面冷銑刨機履帶行走機構設計參數分析[J].養護機械與施工技術,2005(11):31-33.
[9]劉海燕.履帶行走機構的計算與選型計算[J].采礦技術,2013,13(4):90-93.
[10]華南農學院農機教研室.水稻聯合收割機原理與設計[M].北京:中國農業機械出版社,1981.
[11]馬旭.高等農業機械學[M].長春:吉林大學出版社,2006.
[12]蒲良貴,紀名剛.機械設計[M].北京:高等教育出版社,2006.
Design of an Electrical Driven Semi-feed Rice Combine Harvester with Adjustable Wheel Distance Device
Yin Jian1, Chen Lan2, Huang Nianyue2, Xiao Longxiang1,Pan Yuanxiang1
(1.College of Mechanical Engineering, Guizhou University, Guiyang 550025,China; 2.Guizhou Aviation Co Limited,Anshun 561000,China)
Abstract:In order to realize mechanization of rice harvest, some key issues at the present rice combine harvesters must be solved such as heavy in weight, big in size and difficult in transportation.In the paper, the issues are solved from two aspects by means of adjustable wheel distance device and electrical driving system.The adjustable wheel distance makes it possible to drive on a lynch while electrical driven wheel to turn easily. In the paper, the major structures and relative calculations are presented and the control circuit is suggested.
Key words:rice combine harvester; semi-feed; electric driving; adjustable wheel distance
文章編號:1003-188X(2016)03-0129-05
中圖分類號:S225.4
文獻標識碼:A
作者簡介:尹健(1962-),男,貴陽人,教授,工學碩士,(E-mail)yinjian100@qq.com。
基金項目:貴州省科技廳農業攻關項目(黔科合NZ字[2013]3020)
收稿日期:2015-02-24