搖桿式桑葉采摘機撥枝與采摘時間的協調匹配分析
2016-03-23 03:20:05胡迎春莊錦芳牟向偉
農機化研究 2016年3期
胡迎春 ,莊錦芳,閆 鑫,牟向偉,廖 偉
(1.廣西師范大學 職業技術師范學院,廣西 桂林 541004;2.廣西科技大學 機械工程學院,廣西 柳州 545006)
?
搖桿式桑葉采摘機撥枝與采摘時間的協調匹配分析
胡迎春1,莊錦芳2,閆鑫2,牟向偉1,廖偉2
(1.廣西師范大學 職業技術師范學院,廣西 桂林541004;2.廣西科技大學 機械工程學院,廣西 柳州545006)
摘要:以實現機械采摘桑葉為目的,設計一款能自動采摘桑葉的搖桿式桑葉采摘機,并通過對桑葉采摘裝置和間歇撥動定位裝置工作原理分析,建立曲柄滑塊機構運動的幾何模型。通過對稱兩端半圓環刀具的張閉動作時間與間歇撥動裝置運動時間的匹配分析計算,確定了圓柱分度凸輪分度期轉角和停歇期轉角,使間歇撥動定位裝置能及時將桑枝送到桑枝定位框,即對稱兩端半圓環刀具所在位置,使圓環刀具能對桑葉準確實現采摘動作。該研究可為實現桑葉采摘的機械化提供理論和應用依據。
關鍵詞:曲柄滑塊機構;間歇撥動;協調匹配;圓環刀具;桑葉采摘機
0引言
我國自古以來就是一個種桑養蠶的農業大國,尤其是隨著東桑西移工程的實施,在南方很多地方桑蠶養殖達到鼎盛時期,對桑葉的需求量非常大。目前,我國的桑葉采摘方式仍然以手工采摘為主,不僅費時費力,而且效率低下[1-4],因此急需一種桑葉采摘機,可以代替桑農的手工采摘,以降低桑農的勞動強度,提高桑葉采摘效率。為此,設計了搖桿式桑葉采摘機,主要由行走裝置、底座裝置、減速裝置、間歇撥動定位裝置和桑葉采摘裝置等組成[5-7]。間歇撥動定位裝置、桑葉采摘裝置是整個搖桿式桑葉采摘機的重要組成部分。間歇撥動桑枝的時間與桑葉采摘裝置中圓環刀具運動時間能否協調匹配是搖桿式桑葉采摘機能否順利實現桑葉采摘的關鍵,本文將重點研究二者的時間協調匹配問題。
1工作原理與過程
1.1桑葉采摘裝置工作原理
本研究的搖桿式桑葉采摘機的工作原理是基于曲柄滑塊機構類型,通過曲柄滑塊機構的循環往復運動帶動桑葉采摘裝置的上下往復運動。桑葉采摘裝置采用的是對稱結構,左右兩邊均由曲柄、連桿、勾型導軌、彈簧、導輪、導軌滑塊、采桑桿、半圓環刀具及U型塊等幾個部分組成,如圖1所示。
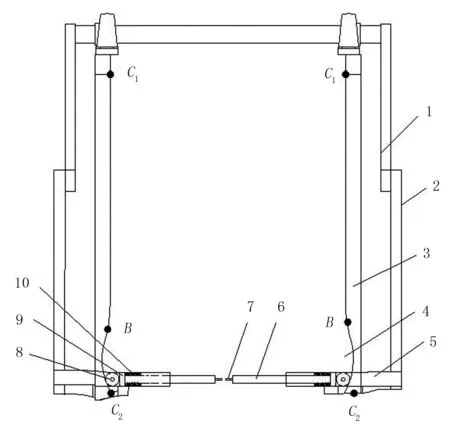
1.曲柄 2.連桿 3.勾型導軌 4.勾型導軌凹槽 5.導軌滑塊
桑葉采摘裝置需要通過圓環刀具閉合、向上運動、向下運動、張開等4個階段動作來完成一次桑葉采摘。設采桑桿初始位置在勾型導軌下極限位置C2點處,采桑桿套在導軌滑塊上且末端與U型塊接觸,在采桑桿末端處套有彈簧,U型塊和導輪放置于勾型導軌凹槽中。發動機提供動力給曲柄滑塊機構,連桿帶動套在導軌滑塊上的采桑桿向上運動;當采桑桿運動到勾型導軌的勾型頸部B點時,由于采桑桿橫向距離的變窄使得位于兩端勾型導軌的彈簧處于壓縮狀態,頂住采桑桿,使位于中軸線位置左右兩邊半圓環刀具實現閉合,開始向上采摘桑葉;采桑桿向上運動過程中,彈簧始終頂住U型塊,從而壓住采桑桿,保證兩個半圓環刀具始終處于閉合狀態,從而持續采摘桑葉。當導軌滑塊運動到上極限位置C1點時,曲柄的圓周運動將使得連桿機構帶動導軌滑塊往回運動,從而帶動采桑桿開始向下運動;當采桑桿回到勾型導軌頸部B點時,彈簧向凹槽位置彈開,處于自然狀態,從而使采桑桿帶動閉合的圓環刀具分開,桑葉采摘結束。分開的半圓環刀具隨著采桑桿在導軌滑塊的帶動下繼續向勾型導軌凹槽移動,直至運動到下極限位置C2點,又由曲柄的圓周運動使連桿機構帶動導軌滑塊再次向上運動,從而帶動采桑桿向上運動和刀具閉合,又開始新一輪的桑葉采摘。
1.2間歇撥動定位裝置工作原理
根據桑葉采摘規律,桑枝被撥動到定位框所在位置并實現采摘,采摘動作完成后再撥動另外一枝桑枝,因此為間歇式撥動。此間歇撥動定位裝置由3個分度盤、3個圓柱分度凸輪和3個桑枝定位盤組成,如圖2所示。
其中,桑枝定位盤上裝有桑枝定位桿。當第1圓柱分度凸輪分度段輪廓推動第1分度盤轉位時,其轉位將推動第1桑枝定位盤轉動,桑枝定位盤的轉動將使得其上的桑枝定位桿將桑枝往定位框方向輸送,此時桑枝尚未到達定位框位置;緊接著第2、第3圓柱分度凸輪轉動到分度凸輪的分度段輪廓,分別推動第2、第3分度盤轉位從而帶動第2、第3桑枝定位盤轉動,被推轉動的桑枝定位盤上的桑枝定位桿將由前面送來的桑枝撥動到定位框所在位置。當圓柱分度凸輪轉動到停歇區轉角時,分度盤上的兩個相鄰滾子跨夾在圓柱分度凸輪的圓環面凸脊上使分度盤停止轉動,這時桑枝定位盤也停止轉位,此時的定位桿將起到桑枝定位的作用。
2時間協調匹配分析計算
將采桑機推至桑園,啟動采桑機,采桑桿在導軌滑塊的帶動下從C2點開始向上運動;采桑桿第1次經過勾型導軌頸部B點和導軌上極限C1點再回到B點時,這個階段定位框內沒有桑枝,閉合的圓環刀具沒有采摘桑葉,這個過程圓柱分度凸輪恰好轉過停歇期圓弧段。當采桑桿自B點開始帶動圓環刀具張開,在導軌凹槽正好走一個來回再次回到B點時,刀具再次閉合,此階段定義為圓環刀具的非工作時間,也是圓柱分度凸輪分度圓弧撥動桑枝進入定位框的時間,這二者時間必須匹配。刀具閉合,恰好框住送入定位框的桑枝,圓環刀具自B點開始向上運動至上極限位置C1點再次返回到B點,此時間定義為圓環刀具的工作時間,也是圓柱分度凸輪停歇區時間,這二者時間也必須匹配。
將桑枝撥動和定位時間與圓環刀具的非工作時間和工作時間相互協調匹配,才能保證物流暢通,順利實現桑葉采摘。
2.1搖桿機構的幾何模型分析
根據桑園桑枝生長狀況,取圓環刀具上下運動完成切割動作的行程H=1 200mm,考慮桑葉采摘機的結構特性取勾型導軌的安裝位置距離曲柄軸心e=300mm處,取滑塊運動時快速行程與慢速行程的平均速度之比值,即行程速比系數K=1.3,從而可以確定曲柄長度[8-11]LAG=LAF=LAE=R=568mm,連桿長度為LBF=LBE=L=1 107mm。將搖桿式桑葉采摘機的搖桿式機構簡化為曲柄滑塊機構的幾何模型如圖3所示。圖3中的B、C1、C2點與圖1中的3個點對應。由幾何關系可得滑塊位移x為
(1)
其中,R為曲柄長度,θ為曲柄轉角。
將位移x對時間求導得
(2)
其中,w為曲柄轉動的角速度。
(3)
聯立式(2)、式(3)得
(4)
其中,v為滑塊運動的速度
曲柄滑塊機構的滑塊從C2點開始滑動,此時滑塊初始速度為0,采桑桿作加速運動,從C2點運動到B點的距離H′達到切割桑葉的速度v1。有資料表明[12-16],割刀切斷禾桿的最小刀速為0.6m/s,由于桑葉葉柄比禾桿更容易切斷,此處選取圓環刀具的最小切割速度v1為0.55m/s。此時,滑塊的運動速度為
v=v1=0.55m/s
(5)
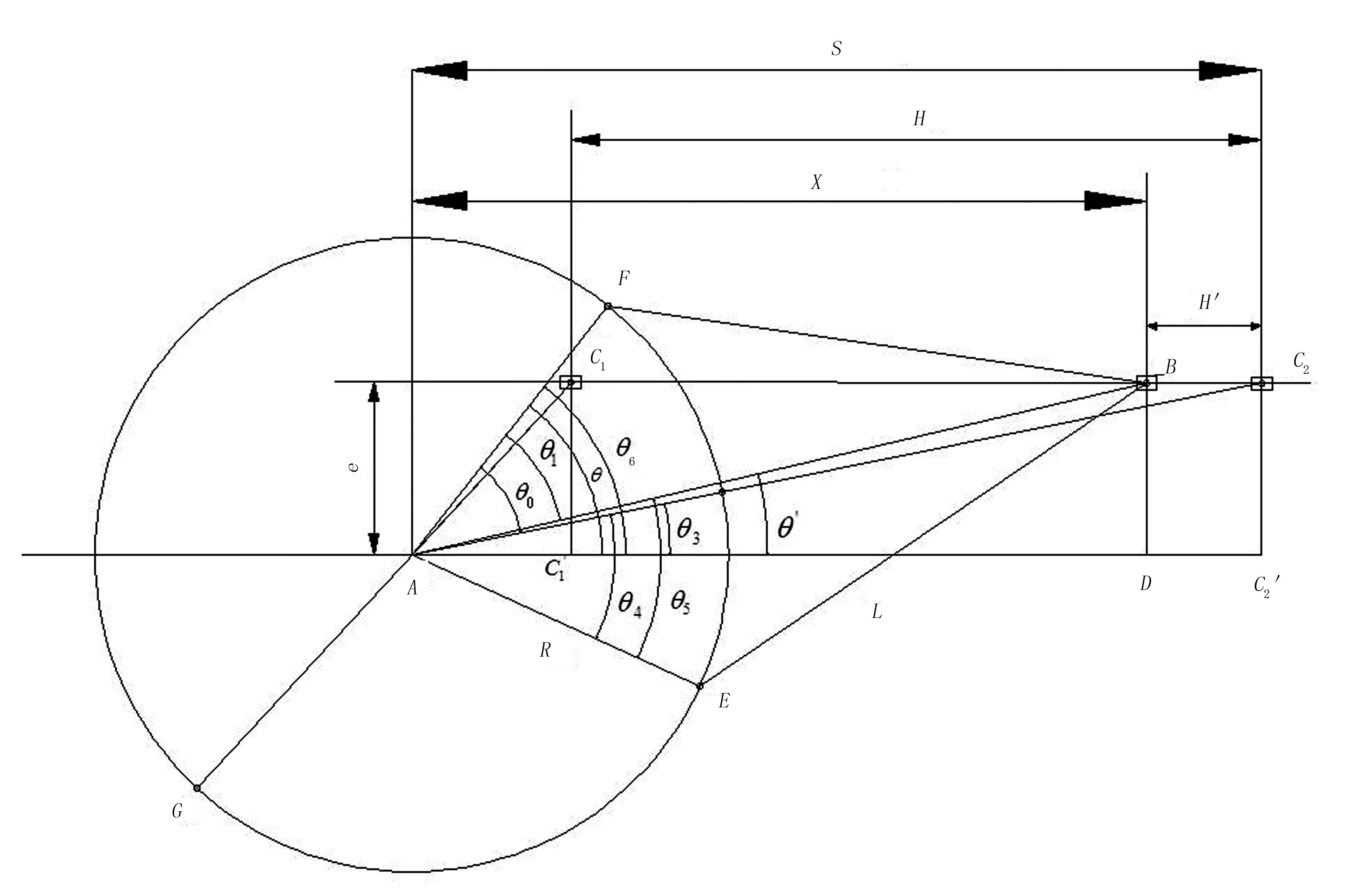
圖3 曲柄滑塊機構幾何模型示意圖
2.2圓環刀具運動時間分析
2.2.1圓環刀具非工作時間分析
圓環刀具從C2點運動到B點時,設圓環刀具所走的行程H′=200mm距離,而此時曲柄轉過的角度為θ0。由圖3可知
(6)
其中,s為曲柄轉動中心到C2點豎直長度,R為曲柄長度,L為連桿長度,e為偏距長度。
由式(6)得s=1 648mm。
在△ABD中由勾股定理得
(7)
由式(7)得LAB=1 480mm。
在△AFB中由余弦定理得
L2BF=L2AB+L2AF-2LABLAFcosθ1
(8)
由式(8)得θ1=40°。
在△ABD中三角函數關系得
(9)
由式(9)得θ'=11.7°。
在△AC2C2'中,由三角函數關系得
(10)
由式(10)得θ3=10.3°。
所以∠BAC2=θ2=θ'-θ3=1.4°。
采桑桿從C2點運動到B點,曲柄轉過角度θ0為
θ0=θ1+θ2=41.4°
(11)
取θ0=41°。圖3中,有
θ6=θ0+θ3=51.3°
(12)
當滑塊運動到B點時,有
θ=θ6=51.3°
(13)
由式(4)得
(14)
由式(5)、式(13)和已知數據代入式(14)得
w=1.1rad/s
(15)
所以轉過角度θ0所用時間為
(16)
其中,t1是圓環刀具的第1部分非工作時間。
在△AEB中,由余弦定理得
L2BE=L2AB+L2AE-2LABLAEcosθ5
(17)
由式(17)得 θ5=40°。
圓環刀具從B點運動到C2點,曲柄轉過的角度θ4為
θ4=θ5-θ2=38.6°
(18)
取θ4=39°。轉過角度θ4所用時間為
(19)
其中,t4是圓環刀具的第2部分非工作時間。因此,圓環刀具的非工作時間為
t'=t1+t4=0.65+0.62=1.27s
(20)
2.2.2圓環刀具工作時間分析
在△AC1C2中,由余弦定理得
H2=L2AC1+L2AC2-2LAC1LAC2cos∠C1AC2
(21)
由式(21)得∠C1AC2=230。
圓環刀具從C2點經過B點運動到C1點曲柄轉過的角度為180°+23°=203°。
記所用時間為t6,則有
(22)
其中,t6為兩段時間之和,即圓環刀具由C2點運動到B點的時間t1和由B點運動到C1點的時t2之和,因此有
t2=t6-t1=3.22-0.65=2.57s
(23)
其中,t2是圓環刀具的第1部分工作時間。
圓環刀具從C1點經過B點運動到C2點曲柄轉過的角度為360°-203°=157°。
記所用時間為t3,則
(24)
其中,t3亦為兩段時間之和,即圓環刀具從C1點運動到B點的時間t5和從B點運動到C2點的時間t4之和,因此有
t5=t3-t4=2.49-0.62=1.87s
(25)
其中,t5是圓環刀具的第2部分工作時間。
綜上可知,圓環刀具工作時間為
t=t2+t5=2.57+1.87=4.44s
(26)
2.3圓環分度凸輪角度計算
由于圓柱分度凸輪停歇期所用時間應等于圓環刀具工作時間,即
td=t
(27)
其中,td為圓柱分度凸輪停歇期的時間,而
(28)
聯立式(15)、式(27)、式(28)得圓柱分度凸輪停歇期轉角為
(29)
圓柱分度凸輪分度期所用時間應等于采桑桿圓環刀具非工作時間,即
tf=t'
(30)
其中,tf為圓柱分度凸輪分度期的時間,而
(31)
聯立式(15)、式(30)、式(31)得圓柱分度凸輪分度期轉角為
(32)
即圓柱分度凸輪停歇期轉角應為280°,分度期轉角應為80°。
3結論
在對搖桿式桑葉采摘機的關鍵裝置進行工作原理分析基礎上,再通過采桑桿圓環刀具的運動分析,建立了曲柄滑塊機構運動的幾何模型;結合桑葉采摘機的采摘特性,確定了曲柄滑塊機構的曲柄合理角速度及其在特定位置處曲柄轉過的角度所用的時間,從而確定了圓柱分度凸輪的分度期和停歇期所用時間。采桑桿在勾型導軌的勾型凹槽內上下行走的時間是圓環刀具的非工作時間,此時間與圓柱分度凸輪分度期的時間匹配,圓環刀具采摘工作時間與圓柱分度凸輪停歇期時間相匹配。最終,確定圓柱分度凸輪的結構設計,即分度期轉角為80°和停歇期轉角為280°。
參考文獻:
[1]李健,韋靈南,鄧敏和.桑葉采摘機的設計[J].農業機械學報,2004(1):101-102.
[2]李健,靳龍.桑葉采摘機手動操作機構的優化設計[J].農業機械學報,2005,36(11):72-74.
[3]牟順海,李少華.茶葉采摘機器手采摘剪刀設計及仿真[J].西南師范大學學報:自然科學版,2014,39(6),55-58.
[4]周兵,何晶.模擬手枸杞采摘機設計[J].農業工程學報,2010,26(1),13-16.
[5]廣西科技大學.一種搖桿式驅動桑葉自動采摘機中國,ZL201310673337.4[P].2014-07-09.
[6]廣西科技大學.一種搖桿式驅動桑葉自動采摘機的桑葉采摘裝置.中國,ZL201310673240.3[P].2014-07-09.
[7]廣西科技大學.一種搖桿式驅動桑葉自動采摘機的桑枝撥動定位裝置.中國ZL201310673244.1[P].2014-07-09.
[8]魯春發,夏德洲.偏心曲柄滑塊機構中偏心距對機構傳動性能的影響[J].湖北汽車工業學院學報,2003,17(2):21-23.
[9]李建功,王家金.按急回要求設計曲柄滑塊機構的一種新解析法[J].機械傳動,2005,29(1):25-26.
[10]周啟興,劉瑩.基于Labview的曲柄滑塊機構運動特性分析[J].南昌大學學報:工科版,2011,33(4):387-390.
[11]楊培剛,劉麗萍,熊少華,等.新型蓮藕切片機設計與優化[J].包裝與食品機械,2014,30(2):99-101.
[12]夏萍,陳黎卿,朱德泉,等.往復式切割器參數的數值模擬及優化[J].機械工程師,2006(5):82-83.
[13]陳翠英,王新忠,何增富.谷物聯合收獲機油菜收獲割臺的設計[J].農業機械學報,2003,34(5):54-56.
[14]恩鑄,胡建平.蓮藕切片機推料裝置的設計[J].農機化研究,2008(11):104-105.
[15]李杰,閻楚良,楊方飛. 基于虛擬樣機技術的聯合收獲機切割機構的仿真[J].農業機械學報,2006,37(10):74-76.
[16]劉源,李浙坤,吳海濤.往復式切割器速度參數優化設計與分析[J].農機化研究,2011,33(8),42-45.
Research on a Rocker Type Machine about Matching Time Analysis of Stirring and Plucking Mulberry Leaves
Hu Yingchun1,Zhuang Jinfang2,Yan Xin2,Mou Xiangwei1,Liao Wei2
(1.Teachers College for Vocational and Technical Education, Guangxi Normal University, Guilin 541004,China;2.College of Mechanical Engineering, Guangxi University of Science and Technology,Liuzhou 545006,China)
Abstract:On the purpose of picking mulberry leaves mechanically, a rocker-type mulberry leaves picking machine was designed. According to the analysis of the operational principle of device of mulberry leaves picking and intermittent slide switch positioning, the geometrical models of motional slider-crank mechanism were built.By means of calculating and matching the open and close time of symmetrical semicircular blades and the motional time of the intermittent slide switch, the angle of indexing phase and the dwell of the cylindrical indexing cam have been confirmed, which enabled the mulberry branches be in the baskets where lies the symmetrical semicircular blades by the intermittent slide switch positioning device.Thus the circular blades can pick mulberry leaves accurately.It has been provided of theoretical and practical proofs of picking mulberry leaves mechanization.
Key words:slider-crank mechanism; intermittent toggle; coordinate matching; circular blades; mulberry leaves pickingmachine
文章編號:1003-188X(2016)03-0144-05
中圖分類號:S225.93
文獻標識碼:A
作者簡介:胡迎春(1971-),女,南京人,教授,博士,碩士生導師,(E-mail)hyc_leeds@163.com。
基金項目:國家自然科學基金項目(51205071)
收稿日期:2015-02-16