自動移栽機雙臂式取苗機構運動學試驗分析研究
2016-03-23 03:20:09毛罕平胡建平韓綠化
農機化研究 2016年3期
孫 慧,毛罕平,胡建平,韓綠化,嚴 蕾
(江蘇大學 現代農業裝備與技術教育部重點實驗室,江蘇 鎮江 212013)
?
自動移栽機雙臂式取苗機構運動學試驗分析研究
孫慧,毛罕平,胡建平,韓綠化,嚴蕾
(江蘇大學 現代農業裝備與技術教育部重點實驗室,江蘇 鎮江212013)
摘要:提出了一種雙臂式取苗機構,簡述了該機構的組成及工作原理,并介紹了其結構特點。為驗證機構的工作穩定性,對其進行了運動學試驗分析。試驗結果表明:該機構在較低取苗速率情況下,機構工作穩定,能夠滿足自動取苗要求;但在較高取苗速度情況下,機構晃動較為明顯,需對其進行進一步優化設計。
關鍵詞:自動移栽機;雙臂式取苗機構;運動學試驗;高速攝像
0引言
移栽是農作物生產過程中的重要環節,但人工移栽作業量大、勞動強度高。隨著我國城鎮化進程和人口的老齡化,農村勞動力不足現象日益明顯,研究并推廣自動取苗技術,已成為我國農業現階段急需解決的問題[1-2]。
從20世紀80年代起,歐美發達國家開始出現自動取苗機構,但多采用電氣聯合控制,輔助裝置多,機構龐大,動力匹配大,同時價格昂貴,使用成本較高,不適合我國國情。日本研制的自動取苗機構多為純機械控制,利用不同的機構組合來實現自動取苗功能;但結構復雜、生產制造成本高,同時對育苗質量要求較高,限制了其在我國的應用[3-8]。
我國移栽機研制較晚,多數為半自動移栽機,用工量仍較大。為此,本文介紹了一種用于自動移栽機的雙臂式取苗機構,并對其進行了運動學試驗分析研究。
1機構組成及工作原理
一種雙臂式取苗機構示意圖如圖1所示。其包括主軸、凸輪Ⅰ、擺桿Ⅱ、連桿Ⅰ、擺桿Ⅲ、連桿Ⅱ、導向槽、滾子及取苗滑動塊等,由凸輪擺桿機構(凸輪Ⅰ、擺桿Ⅱ)、雙搖桿機構(擺桿Ⅱ、連桿Ⅰ、擺桿Ⅲ),以及曲柄滑塊機構(擺桿Ⅲ、連桿Ⅱ、取苗滑動塊、導向槽)經Ⅰ型串聯組合而成。
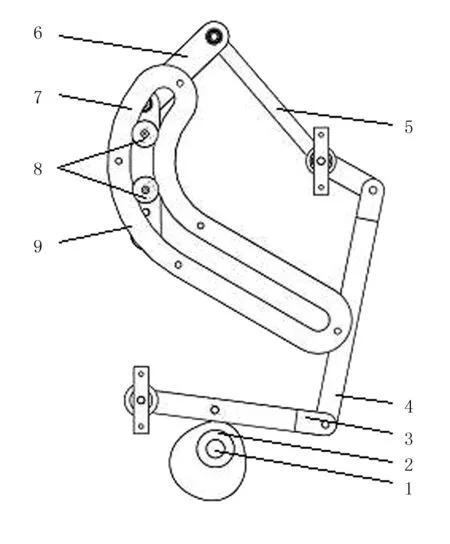
1.主軸 2.凸輪Ⅰ 3.擺桿Ⅱ 4.連桿Ⅰ 5.擺桿Ⅲ
2雙臂式取苗機構特點
雙臂式取苗機構是一種凸輪—連桿組合機構,其三維模型如圖2所示。該機構與全自動旱地移栽機的移箱、栽植機構相配套,可滿足全自動旱地移栽機的移栽要求,與一些已發明的取苗機構相比,具有以下一些特點:
1)采用雙臂式設計,主軸轉動帶動雙搖桿機構,雙搖桿機構同時驅動兩組曲柄滑塊機構工作,完成取苗過程。相比于一般的單臂式取苗機構,取苗效率翻倍。
2)采用導向槽設計,在工作時的取苗、運苗及投苗的運動過程均由導向槽控制。該導向槽取苗段為直線段,可實現垂直穴盤取苗;投苗段可調整投苗姿態,實現直立投苗;中間過渡段為連接圓弧,實現取苗與投苗光滑連通,滿足規劃的取苗路徑要求。
3)結構簡單的連桿機構廣泛應用于實現往復移動和擺動,但其運動規律卻隨構件長度決定,無法精確實現任意給定的運動規律。凸輪機構雖能實現給定的運動規律,而為保證具有較好的效率,用機構傳動質量指標進行設計時,直動從動件會產生過大的縱向尺寸,對擺動從動件會使擺角受到限制。因此,在此機構中采用了凸輪-連桿組合機構的設計方案。通過對凸輪輪廓曲線進行設計,以實現取苗過程中所要求的運動規律,適應取苗和投苗零速度要求,即在取苗時保持靜止穩定夾取,在投苗時保持穩定釋放缽苗。
4)控制開合機構工作的凸輪與取苗機構的凸輪在同一根主軸上,即主軸轉動1圈,取苗機構完成取苗動作的同時,開合機構完成取苗所需的開合動作,兩運動協調工作,完成整個取苗過程。
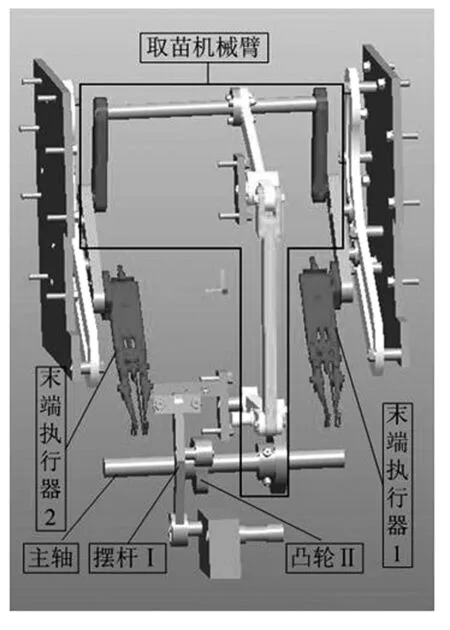
圖2 雙臂式取苗機構三維模型.
3雙臂式取苗機構運動學試驗
為了探究雙臂式取苗機構在實際工作時工作情況和可能存在的問題,為接下來的優化設計做準備,在雙臂式取苗機構試驗臺上,利用高速攝像對該機構的運動學參數進行了測試。利用相配套的高速攝像輔助分析軟件,可以對具體位置點的位移、速度和加速度等進行分析。旱地移栽機機械綜合性能試驗臺如圖3所示。
3.1試驗方法與步驟
利用試驗臺和高速攝像分析系統對雙臂式取苗機構進行運動學特性分析,試驗步驟如下:
1)安裝高速攝像儀并將兩臺攝像儀以一定的角度放置,從而使拍攝的圖像可以在后續的分析過程中進行三維建模。高速攝像儀器如圖4所示。
2)調整試驗臺,并將標定板放在合適位置,在攝像過程中可以完成標定工作。
3)將雙臂式取苗機構上的取苗末端執行器定為標記點,以便后續的分析工作。
4)打開攝像儀,調節鏡頭焦距,使之能清晰成像;打開光源,調節攝像儀幀數,使成像亮度合適;微調鏡頭角度,從而使得試驗臺及標定板都能被完整的拍攝。
5)啟動試驗臺,使雙臂式取苗機構的轉速達到設定值,然后開始圖像采集。
6)使用ProAnalyst軟件對拍攝的圖像進行后處理,得到在不同取苗速率情況下,雙臂式取苗機構中取苗末端執行器的三維運行軌跡、位移及速度圖像。ProAnalyst軟件三維工作界面如圖5所示。
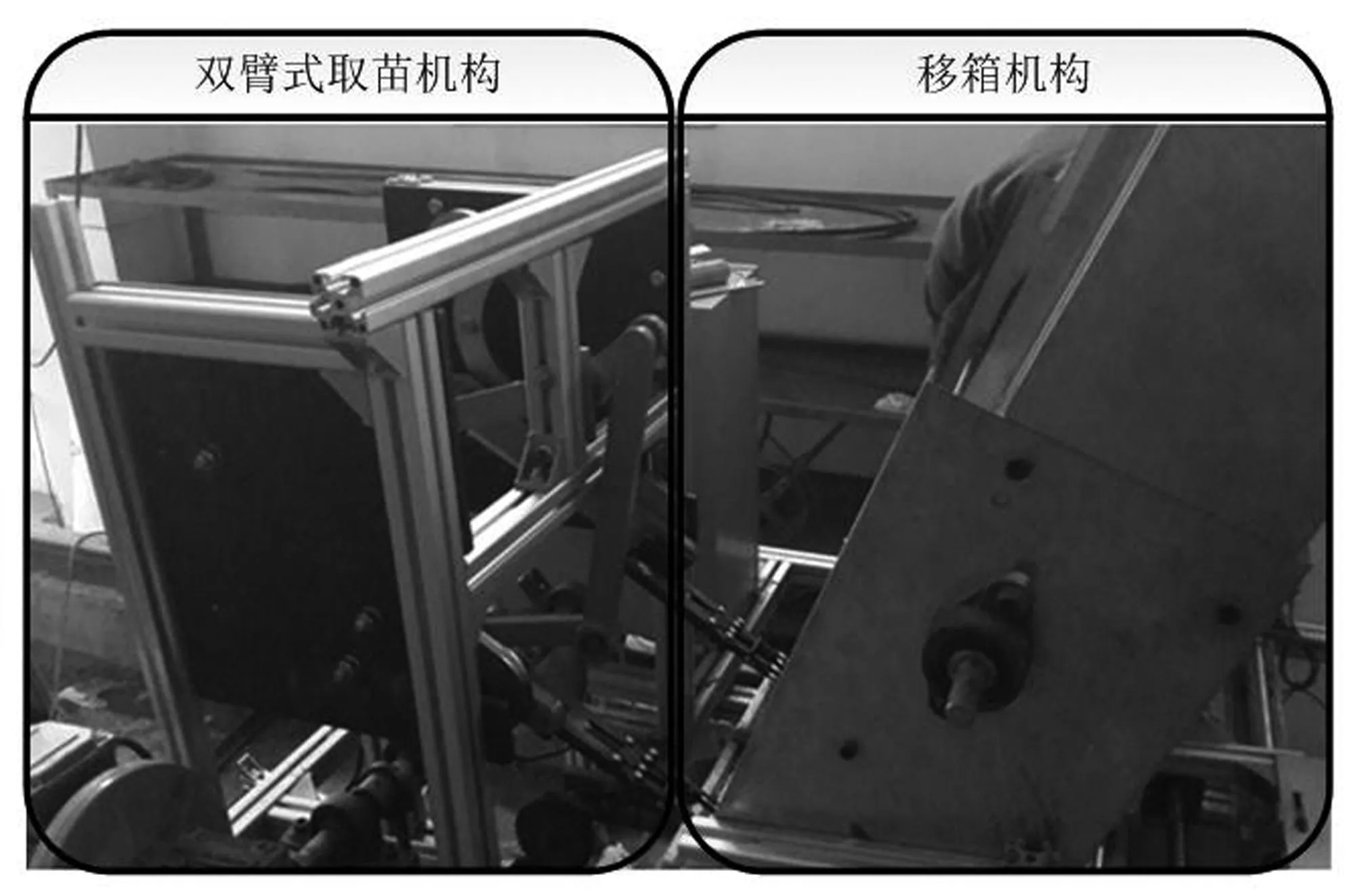
圖3 雙臂式取苗機構試驗臺

圖4 奧林巴斯高速攝像儀
3.2試驗條件
雙臂式取苗機構試驗臺,奧林巴斯高速攝像儀(兩臺),光源(兩臺)。取苗速率設定在60、20株/min(主軸轉速分別為30、10r/min),高速攝影拍攝速率為100幀/s,為了拍攝到取苗全過程,拆除了雙臂式取苗機構的一側。
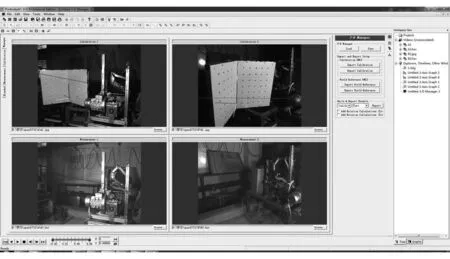
圖5 ProAnalyst軟件操作界面
3.3試驗結果
使用ProAnalyst 圖像分析軟件對所拍攝圖像進行處理,分別得到了取苗速率60、20株/min時,雙臂式取苗機構取苗末端執行器的三維運動的軌跡、位移和速度圖像,如圖6~圖8所示。
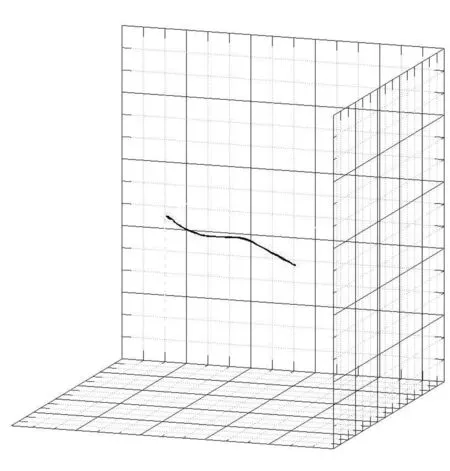
圖6 取苗末端執行器運動軌跡
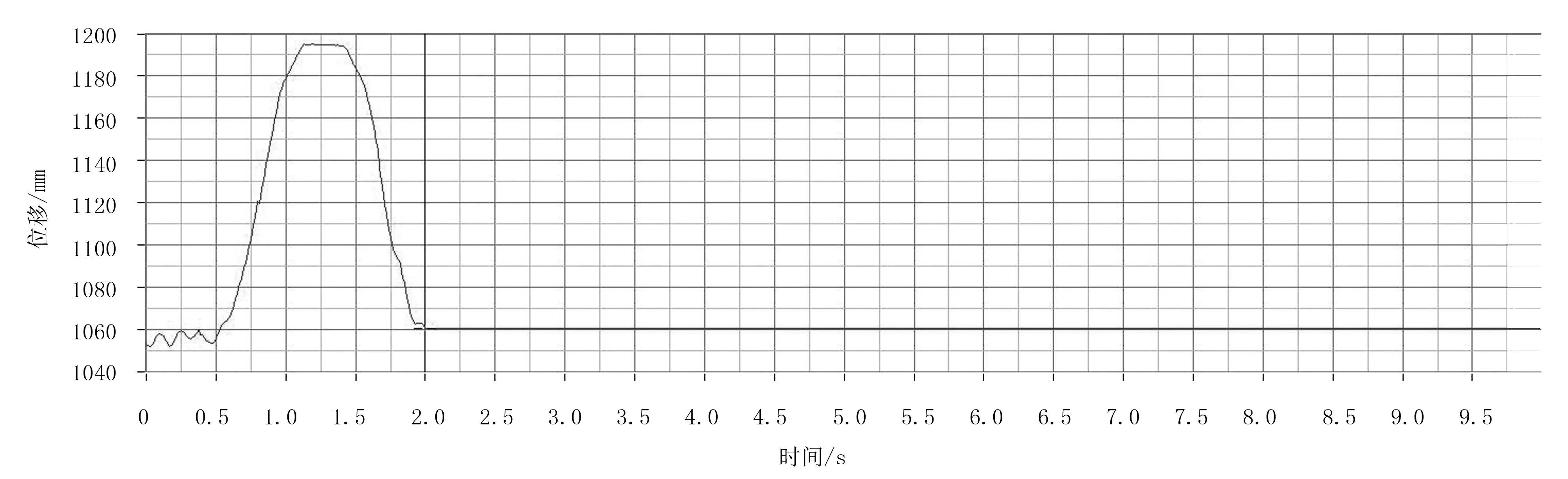
Fig.6 3D motion trail of the pick up
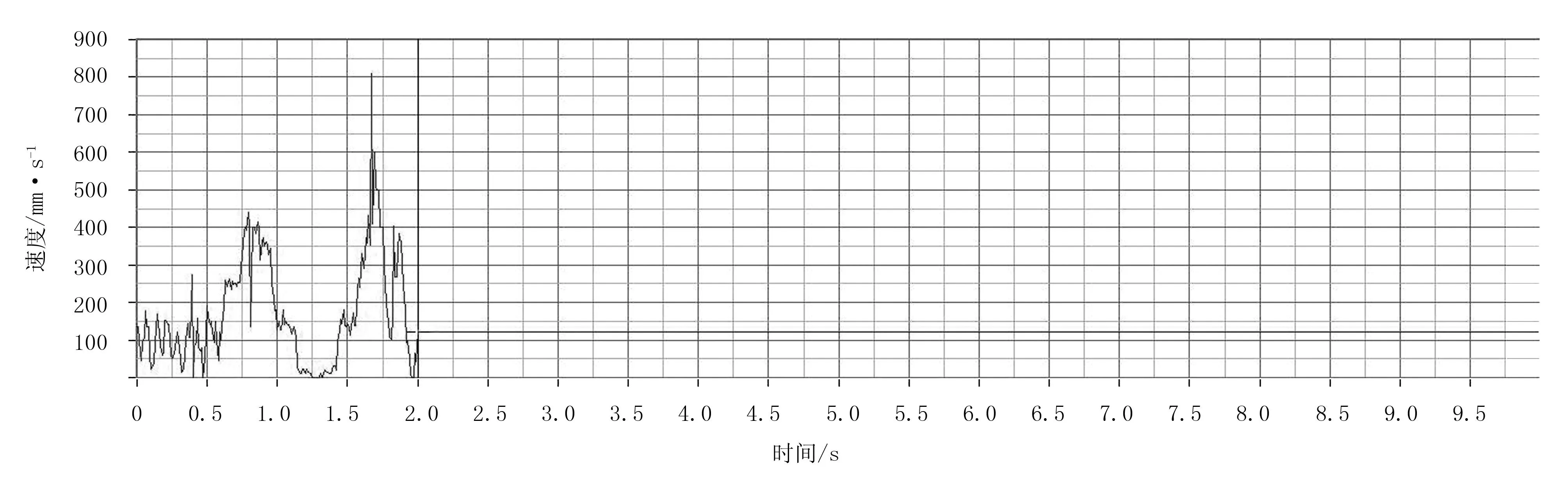
圖7 取苗速率在60株/min時取苗末端執行器的位移及速度
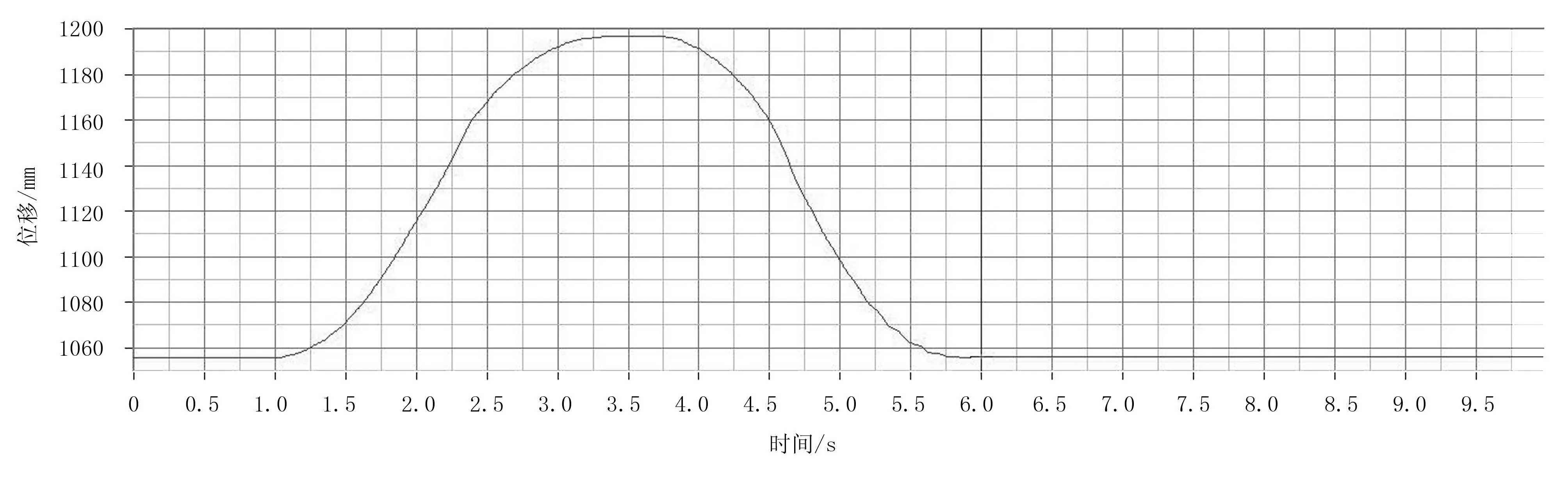
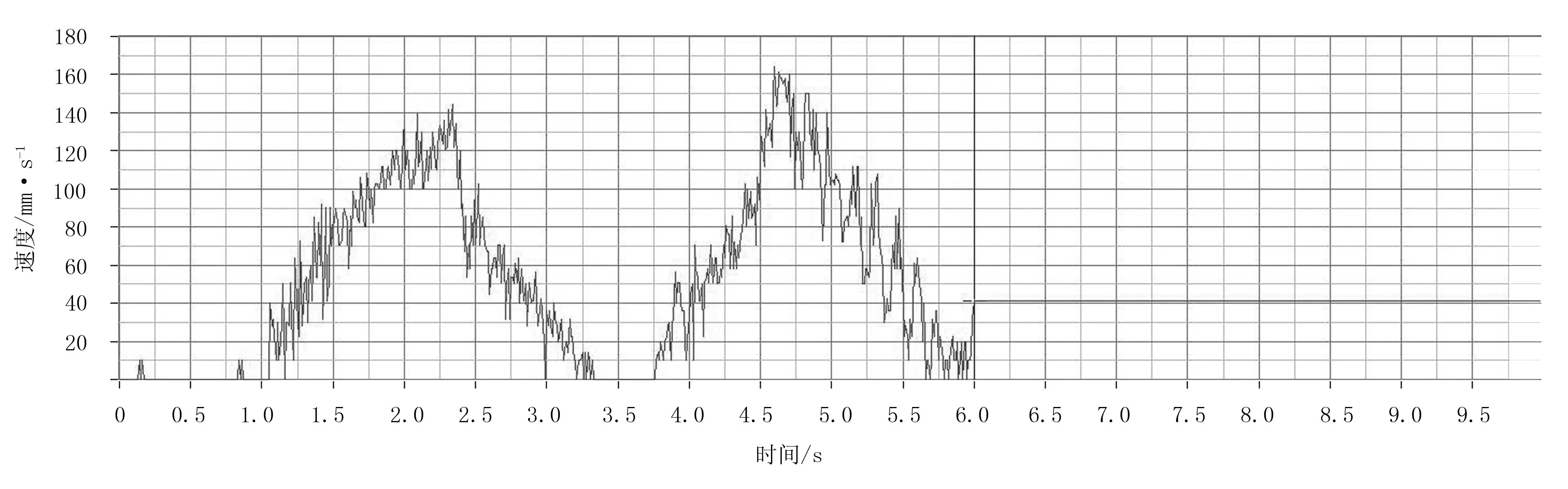
圖8 取苗速率在20株/min時取苗末端執行器的位移及速度
從高速攝像實驗時試驗臺的工作狀況及后續的實驗結果與分析可知:機構在低取苗速率情況下(20株/min),從位移圖像和速度變化圖可以看出,雙臂式取苗機構在取苗及投苗過程時機構位移變化基本為0(0~1s、3~4s),能夠滿足零速投苗的要求;在取苗及帶苗工作過程中,位移曲線變化平穩,取苗機構能夠很好地完成取苗工作。但隨著轉速的提升,當機構取苗速率達到60株/min時,通過位移及速度變化圖像可知,雙臂式取苗機構在投苗段(0~0.5s)處,取苗末端執行器存在10mm左右的往復晃動,影響了投苗效果。針對以上機構振動的情況,找出以下幾點原因:
1)在取苗速率為60株/min時,出現取苗成功率降低現象。其主要原因:當取苗速率高時,由于取苗爪內的彈簧具有延時作用,缽苗被投出時,并非取苗爪運動速度為零的時刻;缽苗被投出后具有較大的向后初速度,使缽苗不能正好投入接苗杯中,導致取苗成功率下降。
2)機構臺架不夠牢固。此試驗臺架均由鋁型材搭建而成,隨著轉速的提高,由于臺架不夠牢固,導致了機構在運動時振動的產生。
3)滑槽直線段與圓弧段銜接處弧度過大。在較高轉速下,滑塊滑動到圓弧段與直線段銜接處時有明顯振動,原因是滑槽直線段與圓弧段銜接處弧度過大。
4)為了能夠保證取苗的運動規律,該取苗機構通過凸輪—連桿機構傳遞動力;為了保證凸輪與連桿上的滾子充分接觸,在連桿與試驗臺架上添加一個彈簧,通過彈力保證滾子與凸輪之間的接觸。然而,彈簧的彈力在機構運動過程中給機構帶來了不可控制振動;滑塊在滑槽銜接處產生的晃動亦與此彈簧的彈力有一定關系。
5)桿與桿之間通過銷和內嵌軸承的方式完成轉動副連接,自制軸承套,焊接在各個連接桿的末端,連接銷亦通過焊接的方法固定在桿件上。焊接帶來的桿件形變(桿件的長度,連接銷與桿件的垂直度)導致了現有取苗機構與理論設計的機構尺寸存在差異。由于此機構在運動過程中,如取苗與投苗位置均有明確要求,通過此連接方式加工安裝的取苗機構并不能很好地達到理想中的取苗效果。另外,各個連桿均由45鋼制成,質量較大,機構在高速運動下由于慣性力亦會產生振動,對于一個輕載的取苗機構而言并不是一個合理的選擇。
4結論
1)介紹了一種適用于自動移栽機的雙臂式取苗機構的組成和工作原理。
2)雙臂式取苗機構具有運動軌跡穩定、取苗效率高、機構運動協調性好等特點。
3)對雙臂式去苗機構進行了運動學試驗分析研究,結果表明:雙臂式取苗機構在較低工作速率的情況下,機構工作穩定,能夠滿足自動取苗要求;但在較高工作速率的情況下,機構振動,影響了投苗效果,需對其進行進一步優化設計。
參考文獻:
[1]王君玲, 高玉芝, 李成華.蔬菜移栽生產機械化現狀與發展方向[J].農機化研究, 2004 (2): 42-43.
[2]胡敏娟, 尹文慶.穴盤苗變形滑針式取苗器的研究[J].浙江農業學報, 2011 (8):154-158.
[3]于紅松, 張鐵中, 楊麗.穴盤苗自動移栽機研究現狀與發展前景[J].農業機械, 2008(20):44-45.
[4]張麗華, 邱立春, 田素博.穴盤苗自動移栽機的研究進展[J].農業科技與裝備, 2009(5):29-31.
[5]YANG Y,K C TING.Factors affecting performance of sliding-needles gripper during robotic transplanting of seedlings[J].Applied Engineering in Agriculture,1991,7(4):493-498.
[6]K C TING,G A GIACOMELLI.A robot for transplanting plugs[J].Greenhouse Grower,1988,6(12):58-60.
[7]K.C.TING.Automate flexibly with robots[J].Greenhouse Grower,1987,5(11):24-28.
[8]K.C.TING.Robot workcell for transplanting of seedlings.PartII:end-effector development[J].Transactions of the ASAE,1990,33(3): 1013-1017.
[9]俞高紅, 謝仁華, 趙勻.橢圓齒輪傳動后插旋轉式分插機構運動分析與試驗[J].農業機械學報, 2008(5):46-48.
[10]劉征, 陳誼超, 丁華鋒.一種新型礦用正鏟液壓挖掘機的運動學分析[J].機械工程學報, 2014(15):28-33.
The Kinematic Test and Analytical Study on the Double Arm Picking Seedling Mechanism of Auto-transplanter
Sun Hui, Mao Hanping, Hu Jianping, Han Lvhua, Yan Lei
(Key Laboratory of Modern Agricultural Equipment and Technology,Ministry of Education,Jiangsu University,Zhenjiang 212013,China)
Abstract:Presented a double arm picking seedling mechanism, sketched the constitution and working principle of this picking seedling mechanism, also introduced the structural features of this picking seedling mechanism. Did the kinematic test to verify the working performance of this picking seedling mechanism. The test result shows: under the low picking seedling rate, the machine worked stabilized, the success rate of picking seedling was high, could satisfy the automatic picking seedling demanding. But under the high picking seedling rate, the machine waggled obviously, the optimal design was needed.
Key words:auto-transplanter; double arm picking seedling mechanism; kinematic test; high speed camera
文章編號:1003-188X(2016)03-0204-05
中圖分類號:S223.9;S220.3
文獻標識碼:A
作者簡介:孫慧(1988-),男,江蘇鎮江人,碩士研究生,(E-mail)423522098@qq.com。通訊作者:毛罕平(1961-),男,浙江寧波人,教授,博士,博士生導師,(E-mail)maohp@ujs.edu.cn。
基金項目:江蘇省科技支撐計劃項目(BE2012381)
收稿日期:2015-02-12