聯合收割機差速器式原地轉向機構設計
2016-03-23 04:34:16姜曉春李耀明
農機化研究 2016年4期
姜曉春,李耀明
(江蘇大學 現代農業裝備與技術教育部重點實驗室,江蘇 鎮江 212013)
?
聯合收割機差速器式原地轉向機構設計
姜曉春,李耀明
(江蘇大學 現代農業裝備與技術教育部重點實驗室,江蘇 鎮江212013)
摘要:為了解決傳統聯合收割機田間轉向時對地表的破壞、減少田間頻繁轉向時對摩擦片的損耗及縮短田頭轉向時間,設計了一種通過制動差速器齒輪從而使得動力反轉的原地轉向機構。分析了系統的工作原理,計算校核了核心部件的強度,針對相關轉向性能進行了干沙路面動力學仿真。仿真結果顯示該機構可實現3種轉向模式:在輸出動力側加載線速度相同時,原地轉向模式轉過90°用時最短、功耗最高、轉矩最大;自由轉向模式中進行轉向微調時無需使用摩擦片;單邊制動轉向模式能夠進行急轉向。所建立的路面模型可以為下一步的田間作業模擬奠定基礎。
關鍵詞:聯合收割機;原地轉向機構;差速器;動力學仿真
0引言
隨著水稻產量的提高及對于提高收割效率要求的不斷增加,大喂入量水稻聯合收割機逐步成為市場主流產品。然而,在增加喂入量的同時整機的質量隨之上升,為了保證整車在濕田的通過性,需要保證收割機具有一定的接地比壓,從而需要增加履帶的長度。履帶接地長度越大,采用單邊制動轉向形式對于地面的刮擦越嚴重,刮擦引起的土壤壅積會使得轉向阻力大大增加,轉向能力迅速下降,嚴重時會導致發動機熄火[1-4]。為保證聯合收割機在田間直行,需要頻繁地進行轉向微調操作,此時制動摩擦片沒有緊密貼合,從而產生了磨損,增加了機器的故障率,影響田間作業的流暢性。田間作業過程中,由于單邊制動轉向模式的轉向半徑一定,在收割換行時需要頻繁調整機頭,使得割臺正對植物,操作繁瑣,駕駛員工作強度很高。
為解決單邊制動轉向機構存在的上述缺陷,設計了一種帶有原地轉向功能的三合一轉向機構,如圖1所示。此種機構依據兩側履帶等速反轉的原理,實現原地轉向;舍棄通常單邊制動轉向模式的分離-制動連動式轉向方式,將單邊制動轉向拆分為自由轉向和單邊制動轉向。
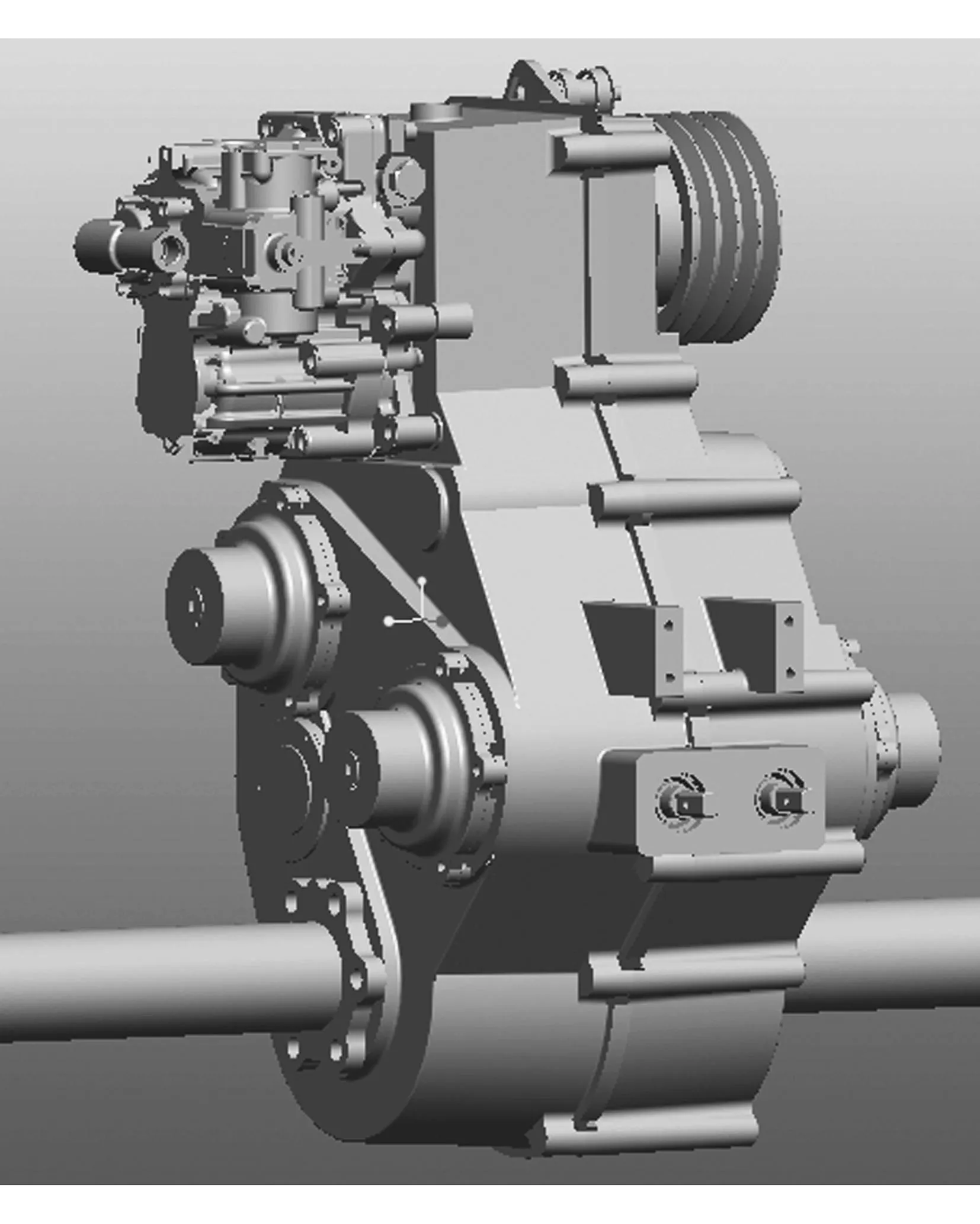
圖1 三合一轉向機構的齒輪箱三維圖
1差速器式原地轉向機構設計
1.1基本結構
圖2為差速器式原地轉向機構。該機構通過對差速器齒輪及左右剎車齒輪進行液壓操作,可實現不同的轉向模式。
本設計在液壓馬達動力輸入齒輪箱后將其分為A、B兩股動力,A、B兩股動力流對稱布置于箱體內:A路動力流由左動力輸入齒輪4與左動力輸出齒輪5構成,其中齒輪4與齒輪5為牙嵌連接;B路動力流由右動力輸入齒輪10與右動力輸出齒輪11構成,其中齒輪10與齒輪11牙嵌連接。左右輸出齒輪5、11分別與左右制動齒輪2、13嚙合,左右撥叉1、14分別控制左右動力流的通斷,摩擦片組3、6、12均由液壓油驅動壓合,差速器齒輪9與差速器制動齒輪8嚙合。
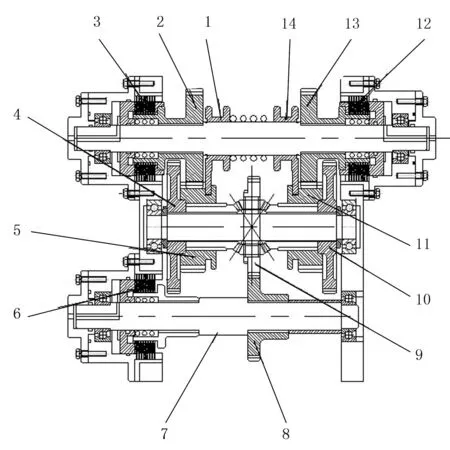
1.左撥叉 2.左制動齒輪 3.左制動摩擦片組
1.2工作原理
1.2.1自由半徑轉向
當收割機需要左右轉向微調時,只要切斷對應的動力流即可完成。如需左轉向時,具體操作為:操縱撥叉1,將動力輸入齒輪4與動力輸出齒輪5分離。
1.2.2單邊制動轉向
當收割機需要實現緊急轉向時,需要首先切斷動力流,然后制動對應的輸出齒輪。如需進行緊急左轉向動作時,具體操作流程為:操縱撥叉1將動力輸入齒輪4與動力輸出齒輪5分離,隨后通過摩擦片組3制動左制動齒輪2,從而使得輸出齒輪5被制動,完成單邊制動動作。
1.2.3原地轉向
如使用向左原地轉向,具體操作步驟如下:操縱撥叉1將動力輸入齒輪4與動力輸出齒輪5分離,隨后通過摩擦片組6制動差速器制動齒輪8,從而使得差速器齒輪9被制動。由于右側動力未被切斷,差速器齒輪9上設置有4個小行星錐齒輪,使得右側的正向動力被反向加載到左側輸出齒輪5上,從而實現原地轉向。
差速器齒輪9結構圖如圖3所示,各行駛工況如表1所示。
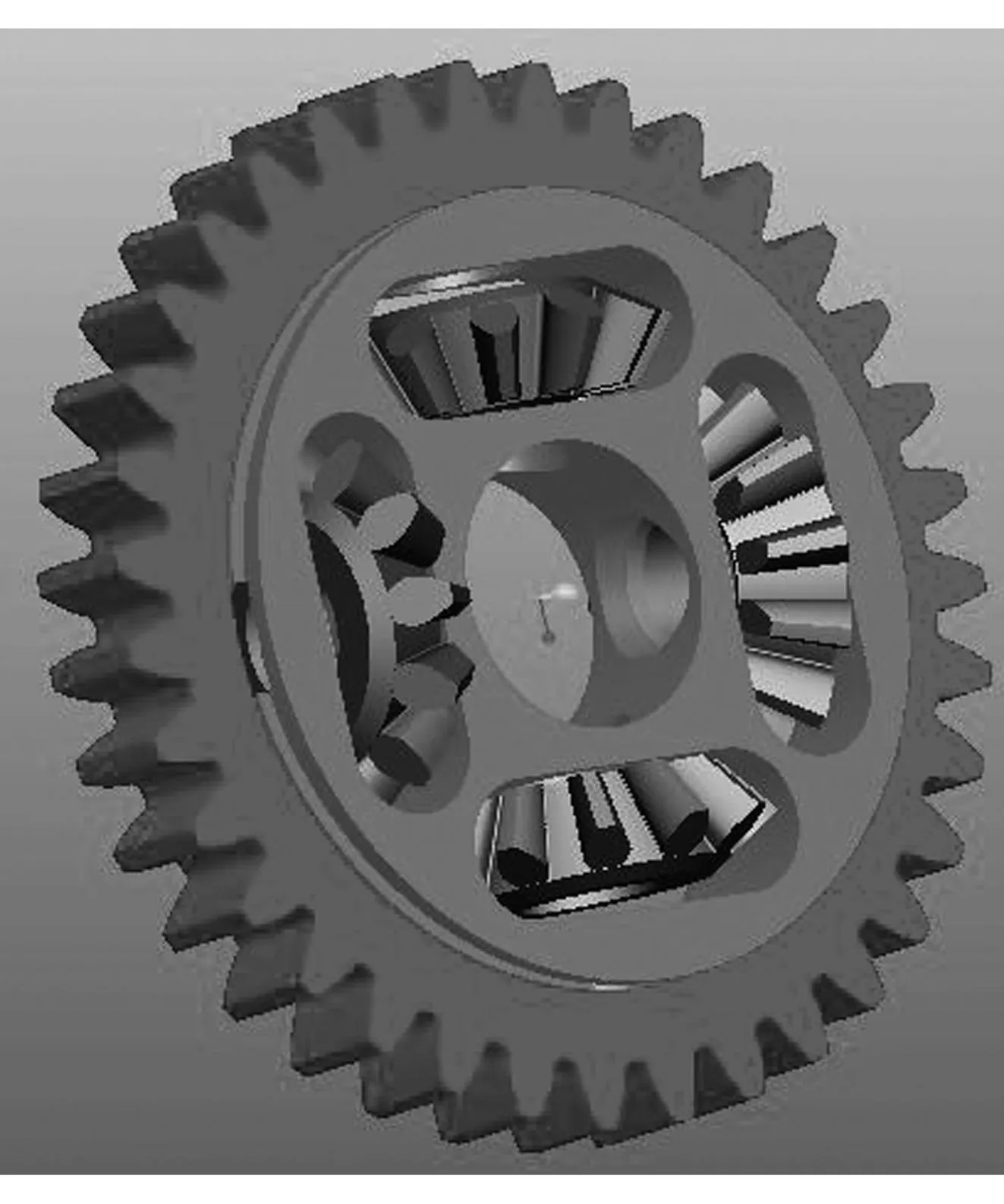
圖3 差速器齒輪14結構
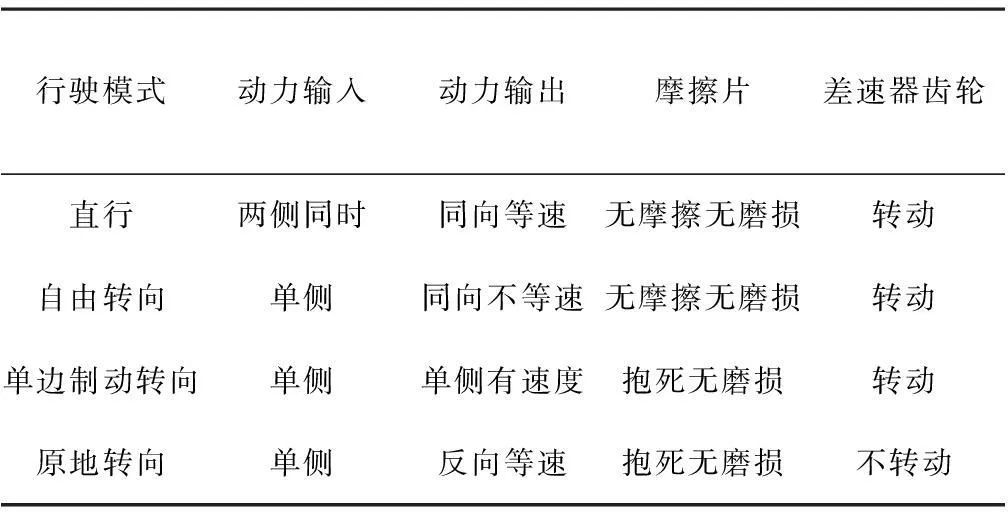
行駛模式動力輸入動力輸出摩擦片差速器齒輪直行兩側同時同向等速無摩擦無磨損轉動自由轉向單側同向不等速無摩擦無磨損轉動單邊制動轉向單側單側有速度抱死無磨損轉動原地轉向單側反向等速抱死無磨損不轉動
1.3原理分析
在分析研究國內外現有單雙流差速轉向機構的基礎上[5-13],設計出一種新型的差速器式原地轉向機構,構思來源于汽車用差速器。兩者主要差別在于:汽車用差速器是由差速器齒輪帶動車輛行走,而本設計中的差速器齒輪僅僅套用了其結構。當差速器齒輪不受外力作用時,兩側動力流可以看作是互相獨立的,一旦通過外力制動了差速器齒輪,差速器齒輪上的行星輪就會起作用。此時,若是切斷了一側的動力,另一側的動力流就會經過行星齒輪的作用反向加載到一側,使得左右兩側實現等速反向的運轉,實現原地轉向。
2差速器齒輪參數設計
2.1計算轉矩
收割機在進行原地轉向時,一側的正向動力通過差速器齒輪上的小錐齒輪反向加載到另一側,小錐齒輪承受的轉矩為[14]
(1)
式中G—車體重力,取G=55 000N;
f—履帶滾動系數,取f=0.16;
μ—轉向阻力系數,取μ=0.67;
λ—轉向比,λ=L/B,取λ=1.4;
r—驅動輪節圓半徑,取r=0.16m;
im—最終傳動比,取im=4.83。
將上述數據代入式(1)得:T=172.96N·m。
2.2強度計算
收割機在進行原地轉向運作時,差速器齒輪上的小錐齒輪受較大的接觸應力和彎曲應力,需對小錐齒輪的模數進行選擇。小錐齒輪的強度主要由其大端面模數決定,因此分別計算接觸強度和彎曲強度下的大端分度圓直徑,來決定小齒輪的模數[15]。
2.2.1接觸強度
接觸強度計算公式為
(2)
式中 d1—小齒輪大端分度圓直徑;
e—錐齒輪類型幾何系數,取e=1 100;
Zb—變位后影響系數,取Zb=1;
ZΦ—齒寬比系數,取ZΦ=1.683;
T1—小齒輪轉矩,取T1=175.96N·m;
KA—使用系數,取KA=1.5;
KHβ—齒向載荷分布系數,取KHβ=1.2;
u—大小錐齒輪齒數比,取u=1.5;
σHlim—試驗齒輪的接觸疲勞極限,取σHlim=1 450。
2.2.2彎曲強度
彎曲強度計算公式為
(3)
式中KFβ—齒向載荷分布系數,取KFβ=1.2;
YF—齒形系數,取YF=1.6;
σFlim—試驗齒輪的彎曲疲勞極限,取σFlim=300;
z1—小錐齒輪齒數,取z1=12。
由式(3)算得:d1=90.55mm。
d1=mz1
(4)
其中,m為齒輪模數。
為了保證強度,齒輪分度圓需大于90mm,模數要大于5。同時,考慮到齒輪需取較小的直徑,以減少箱體的體積。因此取d1=96mm,算得m=8。由于原地轉向功能并不是經常使用,根據實際加工經驗,模數取6完全能夠滿足要求。
3轉向性能分析
差速器式轉向機構的轉向性能主要包括轉向角速度、轉向半徑及轉向功耗等[16]。
3.1轉向半徑和轉向角速度分析
本設計3種轉向模式下運動學參數如圖4所示。
圖4 動力學參數
圖4中:B為收割機的履帶中心距;R為自由轉向時的轉向半徑;O為自由轉向的轉向中心,ω為此時的轉向角速度;O1為單邊制動轉向的轉向中心,ω1為此時的轉向角速度;O2為原地轉向的轉向中心,ω2為此時的轉向角速度;v1為高速側履帶前進速度;v2為低速側履帶前進速度;vc為車體轉向時的瞬時速度。由此可得出3種轉向模式下的轉向半徑和轉向角速度,如表2所示。
表 2 3種轉向模式下轉向半徑和轉向角速度的比較
由于自由轉向的轉向中心根據地面的摩擦阻力決定,當地面摩擦阻力無窮大時,R=B/2;若3種轉向模式的高速側履帶速度相同,則v1>vc。由此可初步得出3種轉向模式的轉向半徑的大小關系:自由轉向>單邊制動轉向>原地轉向;3種轉向模式的轉向角速度的大小關系為ω<ω1<ω2。
3.2轉向功率分析
履帶車輛轉向功率主要包括以下幾種:克服行駛阻力消耗的功率,克服地面轉向阻力矩的功率,克服滑轉和滑移的功率,齒輪箱半制動時摩擦件消耗的功率。由于滑轉滑移功率消耗和摩擦件的功率消耗無法直接通過測量獲得,且對整體功率消耗影響因素較小,因此在理論計算時舍去。轉向功率計算公式為
Px=FR1v1+FR2v2+μmgLωx/4
(5)
式中Px—轉向總功率;
FR1—高速側地面阻力;
FR2—低速側地面阻力;
μ—轉向阻力系數;
m—收割機質量;
L—履帶接地長度;
g—重力常數;
ωx—不同轉向模式下對應的角速度。
將表2中的角速度代入式(5),即可得出各轉向模式消耗功率表達式為
自由轉向為
P=fmg(v1+v2)/2+μmgLw/4
(6)
單邊制動轉向為
P1=fmgv1/2+μmgLw1/4
(7)
原地轉向為
P2=fmgv1+μmgLw2/4
(8)
由式(6)~式(8)可得出:當高速側履帶轉速相同時,隨著轉向半徑的減小,轉向功耗逐步增加。
4動力學仿真
本設計使用RecurDyn軟件進行動力學仿真測試該設計的可行性和可靠性。該軟件以多體動力學理論為基礎,采用相對坐標系運動方程理論和遞歸算法,減少絕對坐標體系中約束方程的數量,適合于求解大規模復雜的多體動力學仿真問題。軟件中含有低速履帶行走模塊,適合于工程機械和農業機械的仿真[17-20]。
4.1實體建模
為減少仿真時間,在保留原有功能基礎上對收割機模型進行簡化。現有收割機長寬比約1.5,因此定義模型長3 600mm,寬2 400mm,整車質量取5.5t;隨后建立兩個履帶系統,每個履帶系統包括1個主動輪、1個導向輪、5個支重輪、1個托帶輪及54節履帶板。
轉向機構也進行了簡化,包括1對驅動軸、1對驅動輪、1個差速器齒輪和2對互相嚙合錐齒輪,如圖5所示。
4.2約束添加
設置車輛各部件之間的鏈接,主要定義項有:車架與母體之間定義為Fixed,主動輪與母體間定義為Revolute,支重輪、托帶輪、導向輪均與車架定義為Revolute,差速器齒輪與母體定義為Revolute,外側兩個錐齒輪與母體定義為Revolute,差速器齒輪上兩個錐齒輪與差速器齒輪定義為Revolute。
由于軟件中的錐齒輪嚙合模塊不好直接調用,因此對錐齒輪嚙合進行接觸定義,即通過定義錐齒輪齒與齒的接觸來進行力的傳遞。由于導入的錐齒輪的齒和齒面是分開的,因此首先要通過布爾運算將齒和面接合為一個整體,然后對需要接觸的齒面進行定義,最后使用Contact命令中的Extended Surface to Surface進行齒面接合,完成約束定義。
圖5 轉向機構及履帶模型
4.3路面模型的建立
本仿真采用的是二維平地,設定地面為干沙路面,通過建立的兩條平行直線直接拉成路面,在路面模塊中設置好參數,如表3所示。
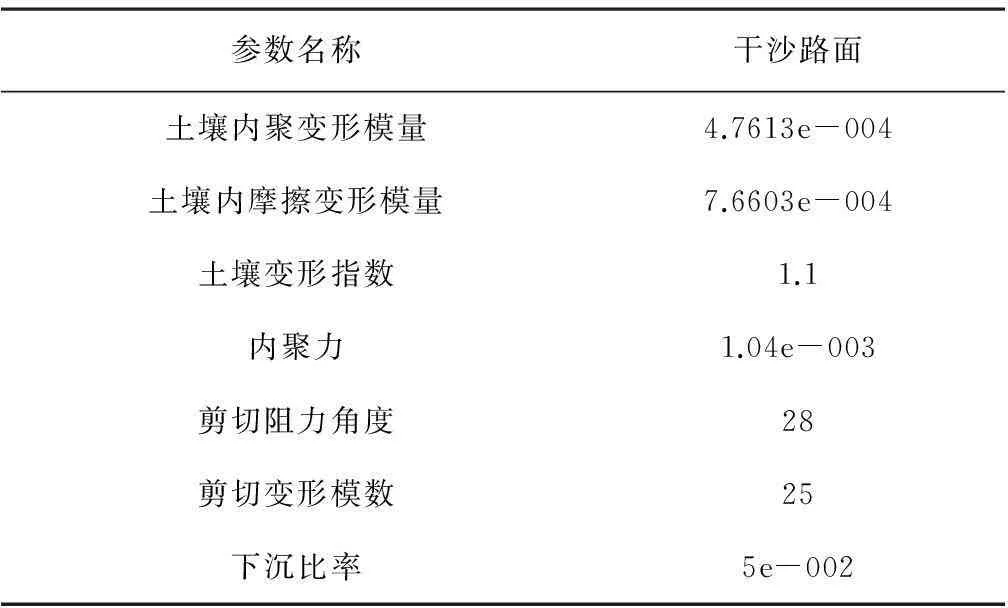
表3 土壤參數
4.4仿真過程及結果
由于是采用的簡化模型,因此需要根據設計意圖對轉向機構分別進行驅動定義。差速器齒輪部位定義一個Motion,左右嚙合錐齒輪各定義一個Motion。由于軟件定義Motion需要設定表達式,因此設置Motion1為速度-時間驅動形式,然后輸入Step(Time,0,0,2,3.6)。該表達式的含義為在0~2s時間內從0加速至3.6rad/s;隨后設置Motion2為0,模擬完全制動的工況。進入主界面進行仿真,分別對3種模式進行加載。
4.4.1自由半徑轉向
外側履帶施加動力Motion1,差速器齒輪和另一側履帶不施加動力,點擊仿真,完成后進入Polt模塊,分別調出角速度—時間曲線和驅動力—時間曲線。仿真得左右兩側履帶速度分別為v1=0.576m/s,v2=0.538m/s,轉動角速度ω=0.15rad/s,驅動力為12 500.5N。
4.4.2單邊制動轉向
外側履帶施加動力Motion1,差速器齒輪不施加動力,另一側履帶施加動力Motion2,點擊仿真,完成后進入Polt模塊,分別調出角速度-時間曲線和驅動力-時間曲線。仿真結果為:驅動側履帶速度v1=0.576m/s,轉動角速度ω=0.38rad/s,驅動力20 000N。
4.4.3原地轉向
外側履帶施加動力Motion1,差速器齒輪施加動力Motion2,另一側履帶不施加動力,點擊仿真,完成后進入Polt模塊,分別調出角速度-時間曲線和驅動力-時間曲線。仿真結果為:驅動側履帶速度為v1=0.576m/s,轉動角速度ω=0.78rad/s,驅動力41 250N。
3種轉動模式下角速度時間曲線和驅動力時間曲線如圖6和圖7所示。
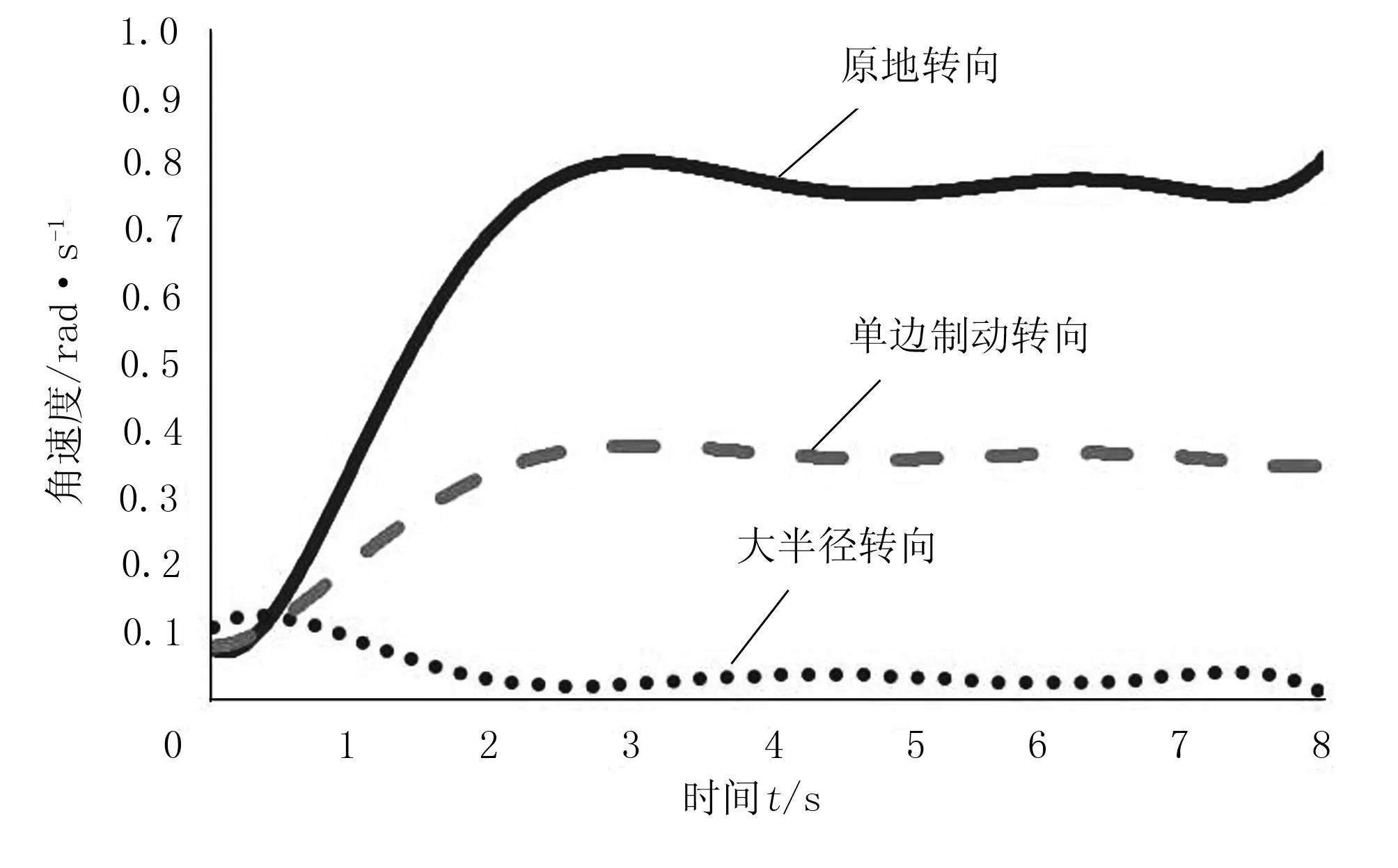
圖6 3種轉向模式下角速度-時間曲線
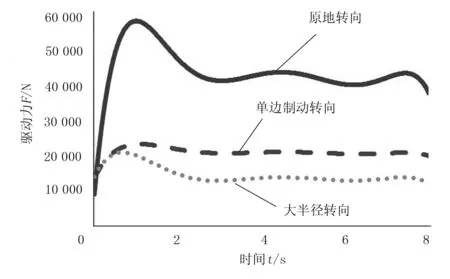
圖7 3種轉向模式下驅動力-時間曲線
由圖6可知:當驅動側轉速相同時,單邊制動轉向和原地轉向的角速度之比近似為1:2,這與之前理論轉向公式相符。自由轉向由于半徑的不確定性,不能給出量化的對比;但根據仿真輸出圖像,在干沙路面上單邊制動的角速度大于自由轉向的角速度,這與之前的理論分析相符。由此可說明,仿真模型建立正確,轉向機構確實可行。
根據公式有
P=F·v
(9)
式中F—驅動力;
v—主動部件線速度。
驅動側施加的速度都是相同的,根據圖6可得出3種轉向方式功率總消耗,如表4所示。
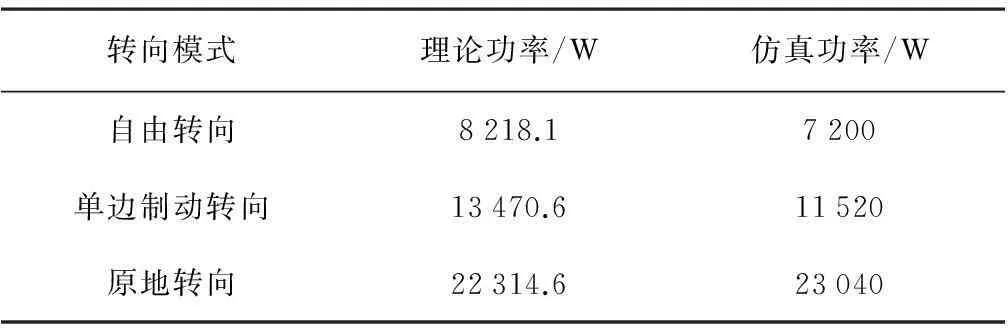
表4 理論功耗和仿真功耗的對比
由表4可知:仿真數據與理論數據所得的趨勢走向基本一致,具體數值上自由轉向和單邊制動轉向的仿真所得數據為理論數據的85%。這是由于實際仿真過程中模擬了履帶滑轉滑移的工況,仿真半徑大于理論半徑,因此仿真消耗功率小于理論消耗功率。原地轉向的仿真功率比理論功率略大,是由于履帶仿真轉向時產生滑移,消耗了一部分功率。由圖7可知:原地轉向的消耗功率在外側履帶速度相同時遠大于其他兩種轉向模式,這個結論與之前的理論分析類似。其原因在于:原地轉向時,轉向半徑最小,相比其他兩種轉向模式,耗時最短;根據能量守恒原理,當外側動力一致,轉過角度相同時,消耗總能量一致,耗時最短的轉向模式功耗最高。
5結論
針對單塊水田田頭短、收割機無效轉向動作過多及作業時頻繁換向對摩擦片造成損害等問題,提出了一種三合一轉向功能的差速器式轉向機構。同時,介紹了該設計的結構原理,并對核心零部件進行校核設計,在RecurDyn環境下建立轉向機構-履帶-地面模型,進行了動力學仿真,論證了該設計確實可行。仿真得出3種轉向方式各有優點:自由轉向能夠實現轉向微調時不耗損摩擦片;在需要急轉時采用單邊制動轉向,保留現有收割機的功能;水田田頭進行轉向時采用原地轉向,減少無效轉向動作,減輕工作強度。根據仿真運算可得出:由于原地轉向功耗很大,轉矩也大,因此在滿負荷的情況下應盡量減少使用此功能,確保機器的可靠性。
參考文獻:
[1]曹付義,周志立,賈鴻社.履帶車輛轉向機構的研究現狀及發展趨勢[J].河南科技大學學報,2003,24(9):89-92.
[2]任茂文,張曉陽,王戩.車輛地面力學研究現狀與展望[J].機械制造與研究,2007,36(4):1-2.
[3]孫海濤,王國強. 軟路面履帶轉向阻力的研究[J].建筑機械,1995(9):23-25.
[4]陳明,陳云. 新型差速轉向機構力分析[J].機械設計與研究,1997(3):13-14.
[5]姚世瓊. 水稻聯合收獲機轉向機構的探討[J]. 農業機械學報,1989,20(4) : 91-94.
[6]曹付義,周志立,賈鴻社. 履帶拖拉機液壓機械雙功率流差速轉向機構設計[J]. 農業機械學報,2006,37(9) : 5-8.
[7]日高茂實. 強制デフ式操舵システムの開発: 第 1 報 [J]. 農業機械學會誌,2002,64(2) : 111-116.
[8]遲媛,蔣恩承. 履帶車輛差速式轉向機構性能試驗[J]. 農業機械學報,2008,39(7) : 15-17.
[9]株式會社久保田.變速傳動裝置:中國,CN 101568751A[P].2009-10-28.
[10]井關農機株式會社.聯合收割機:中國,CN 102187760A[P].2011-09-21.
[11]洋馬農機株式會社.行駛變速裝置的操舵裝置:中國,CN 1230930A[P].1999-10-06.
[12]Berkshire Powertech.Steering Transmission for Tracked Vehicals:美國,US 8298106 B2[P].2012-10-30.
[13]廣西壯族自治區農業機械研究所.一種行走轉向裝置:中國,CN 2630079Y[P].2004-08-04.
[14]李耀明,葉曉飛,徐立章,等.聯合收割機行走半軸載荷測試系統構建與性能試驗[J].農業工程學報,2013,29(6):35-41.
[15]聞邦椿.機械設計手冊(第3卷)—機械零部件設計[M].北京:機械工業出版社,2010.
[16]方志強,高連華,王紅巖.履帶車輛轉向性能指標分析及實驗研究[J].裝甲兵工程學院學報,2005,19(4):47-50.
[17]焦曉娟,張湝渭,彭斌彬.RecurDyn多體系統優化仿真技術[M].北京:清華大學出版社,2010.
[18]駱清國,司東亞,龔正波,等.基于RecurDyn的履帶車輛動力學仿真[J].車輛與動力技術,2011(4):26-28.
[19]張波,李天興,王斌.基于Inventor和RecurDyn的錐齒輪建模及運動仿真[J].礦山機械,2013,41(9)123-125.
[20]陳安成,穆希輝,杜峰坡.基于Recurdyn 的小型履帶車的建模與仿真[J].機械設計,2013,30(10):36-38.
Design of Differential Type Pivot Steering Transmission for Combine Harvester
Jiang Xiaochun, Li Yaoming
(Key Laboratory of Modern Agricultural Equipment and Technology, Ministry of Education, Jiangsu University, Zhenjiang 212013, China)
Abstract:In order to solve the damage of the field surface when the combine harvester steering,reduce the loss of the friction plate when combine harvester frequently steering in the field, shorten the turnaround time.design a pivot steering transmission which reversal the power by brake differential gear. Analyse the working principle of the system, calculate and check the strength of the core components, in connection with the related steering performance conduct a dynamic simulation. The result show that the mechanism can achieve three types of steering, when the power output side load the same line speed, the pivot steering with the shorst time, the maximum power consumption and the maximum torque,fine-turn steering don’t need to use friction plate, the pavement model can lay the foundation for next field operations simulation.
Key words:combine harvester; pivot steering mechanism; differential; dynamic simulation
文章編號:1003-188X(2016)04-0107-06
中圖分類號:S225.3
文獻標識碼:A
作者簡介:姜曉春(1990-),男,江蘇鹽城人,碩士研究生,(E-mail)jxcwzk@163.com。通訊作者:李耀明(1959-),男,江蘇張家港人,教授,博士生導師,(E-mail)ymli@ujs.edu.cn。
基金項目:江蘇省科技成果轉化資金項目(BA2014062)
收稿日期:2015-03-30
